0.前言
在本次实验中,我们将学习如何使用STM32微控制器和OLED显示屏,实现显示时间、温度和湿度的功能。这个应用场景在很多项目中都非常常见,例如室内温湿度监测、气象站等。
在现代生活中,对时间、温度和湿度的监测和显示具有重要的意义。无论是在家庭、办公室还是工业环境中,了解当前的时间和环境条件都是必要的。通过将这些信息实时显示在OLED屏幕上,我们可以方便地获取这些数据,从而更好地管理和调整我们的生活和工作。
在过去,通常需要使用多个独立的设备来获取这些信息,例如时钟、温度计和湿度计等。但是,通过本次实验,我们可以利用STM32微控制器的强大功能和OLED显示屏的高度可定制性,将这些功能集成到一个设备中。这样一来,我们不仅可以减少设备的数量和复杂度,还可以提高信息的集成度和可视性。
本次实验的应用背景和价值在于:
实时显示:通过使用STM32微控制器和OLED显示屏,我们可以实时显示当前的时间、温度和湿度,无需额外的设备或操作。
一体化设计:将时间、温度和湿度的功能集成到一个设备中,可以减少设备数量和占用空间,提高设备的整体美观性和易用性。
数据记录和分析:通过将温湿度数据记录到STM32的存储器中,我们可以进行后续的数据分析和处理,例如绘制温湿度曲线图或进行数据比较。
应用扩展:在基础的时间、温度和湿度显示功能上,我们还可以扩展其他功能,例如报警功能、历史数据查询等,以满足不同应用场景的需求。
总之,本次实验将带领我们实现一个功能强大且实用的应用,通过STM32微控制器和OLED显示屏,实时显示时间、温度和湿度。这个实验不仅有实际应用的价值,还可以帮助我们更深入地理解和掌握STM32的开发和应用。
1.温度传感器—AHT20

以上表格为对AHT20温度传感器的介绍,AHT20是一种数字温湿度传感器,具有高精度测量、低功耗、快速响应时间等优点。它采用I2C接口进行通信,可直接连接到微控制器等设备。AHT20的温度测量范围为-40℃至+85℃,温度测量精度为±0.3℃。湿度测量范围为0%RH至100%RH,湿度测量精度为±2%RH。它的供电电压范围为2.1V至3.6V。AHT20广泛应用于温湿度监测和控制领域,例如室内环境监测、气象站、温湿度记录仪等。

以上表格为对SSD1306 OLED控制芯片的介绍。OLED是一种自发光显示技术,具有高对比度、快速响应、低功耗等优点。SSD1306是常用的OLED控制芯片,通过I2C或SPI接口与主控器连接。SSD1306支持多种分辨率配置和显示颜色,具有一些特殊功能如显示缓冲区、显示翻转、屏幕亮度调节等。OLED广泛应用于便携式设备、智能穿戴设备、电子产品、工业控制、车载显示等领域。
3.系统板—STM32F103C8T6

以上表格为对STM32F103C8T6微控制器的介绍。STM32F103C8T6属于STM32F1系列,它采用了ARM Cortex-M3内核,具有最高72MHz的工作频率。该芯片具有64KB的闪存和20KB的SRAM,并提供了丰富的外设资源,如通用定时器、PWM输出、多种通信接口等。它还拥有较多的GPIO引脚,提供了灵活的连接能力。STM32F103C8T6的供电电压范围为2.0V至3.6V,工作温度范围为-40℃至+85℃。由于其性能和价格的平衡,它被广泛应用于嵌入式系统、物联网、工业控制、自动化等领域。
4.功能的实现
4.1设计目标
本设计旨在利用STM32微控制器和OLED显示屏实现实时显示时间、温度和湿度的功能。通过集成这些功能于单一设备中,用户可以方便地获取环境信息并进行实时监测和调整。
4.2硬件设计
在硬件方面,我们将使用STM32F103C8T6微控制器作为主控制器,AHT20温湿度传感器用于测量环境温度和湿度,以及SSD1306 OLED显示屏用于显示时间、温度和湿度。这些硬件组件相互配合,实现了整体功能的实现。
4.3软件设计
在软件方面,我们将使用STM32CubeIDE进行开发。通过编写相应的代码,我们将实现以下功能:
初始化:初始化STM32微控制器、AHT20传感器和SSD1306 OLED显示屏,建立各个组件之间的通信连接。
读取数据:通过STM32微控制器读取AHT20传感器的温度和湿度数据。
时间获取:通过STM32内部时钟或外部时钟模块,获取当前的时间。
数据处理:对读取到的温度、湿度和时间数据进行处理,确保其准确性和可用性。
数据显示:将处理后的数据通过SSD1306 OLED显示屏进行显示,实现实时的时间、温度和湿度信息展示。
循环更新:通过循环结构,不断更新和刷新显示的数据,以保证数据的实时性。
通过以上硬件和软件设计,我们可以实现STM32-OLED显示时间+温度和湿度的功能。这个设计可以帮助用户方便地获取环境信息,并进行实时监测和调整。同时,这个设计也展示了STM32微控制器和OLED显示屏的强大功能和灵活性,为用户提供了一个实用且易于使用的解决方案。
5.代码的实现
5.1 AHT20的代码
参考
链接: https://blog.csdn.net/weixin_63019977/article/details/134266104
文章来源:https://www.toymoban.com/news/detail-772853.html
/*******************************************/
/*@????:?????????? */
/*@??:????????? */
/*@??:V1.2 */
/*******************************************/
//#include "main.h"
#include "AHT20.h"
#include "gpio.h"
#include "i2c.h"
void Delay_N10us(uint32_t t)//????
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//????
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //????
{
while(t--)
{
SensorDelay_us(1000);//??1ms
}
}
//void AHT20_Clock_Init(void) //????
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //?PB7????? , ???????, PB7??I2C?SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
void SDA_Pin_Output_Low(void) //?P7????? ???????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
void SDA_Pin_IN_FLOATING(void) //SDA???????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//??
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL?????,P14??I2C?SCL
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void SCL_Pin_Output_Low(void) //SCL?????
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
}
void Init_I2C_Sensor_Port(void) //???I2C??,??????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//????
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
}
void I2C_Start(void) //I2C????START??
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //?AHT20?????
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//?AHT20??????
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
//if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1;
Byte = (Byte<<1)|a;
//SCL_Pin_Output_Low();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //?AHT20?????ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //????ACK??
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //?????ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //??????
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//??AHT20??????
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //??cal enable??????
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //?AHT20??AC??
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC????
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC????:CRC8/MAXIM
//???:X8+X5+X4+1
//Poly:0011 0001 0x31
//????????? 1000 1100 0x8c
//C????:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //??CRC??,????AHT20????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//?AHT10??AC??
Delay_1ms(80);//??80ms??
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//????bit[7]?0,???????,??1,?????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//???,??????0x98,??????,bit[7]?1;???0x1C,??0x0C,??0x08???????,bit[7]?0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//??
Send_ACK();
Byte_3th = AHT20_RD_Byte();//??
Send_ACK();
Byte_4th = AHT20_RD_Byte();//??/??
Send_ACK();
Byte_5th = AHT20_RD_Byte();//??
Send_ACK();
Byte_6th = AHT20_RD_Byte();//??
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//??
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //??
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC???,??AHT20????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//??CRC????
AHT20_SendAC();//?AHT10??AC??
Delay_1ms(80);//??80ms??
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//????bit[7]?0,???????,??1,?????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//???,??????0x98,??????,bit[7]?1;???0x1C,??0x0C,??0x08???????,bit[7]?0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//??/??
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//??
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//??
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC??
Send_NOT_ACK(); //??: ?????NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//??
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //??
}
else
{
ct[0]=0x00;
ct[1]=0x00;//???????,????????????
}//CRC??
}
void AHT20_Init(void) //???AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8??NOR????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE?????,AHT20???????0xBE, AHT10???????0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//?????bit[3]?1,?????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//???0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//??5ms??
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//??10ms??
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);//?????
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
5.2 OLED的代码
参考链接: STM32进阶-OLED屏幕模块-CSDN博客
通过汉字取模软件,将所需要的汉字取模出来: 文章来源地址https://www.toymoban.com/news/detail-772853.html
文章来源地址https://www.toymoban.com/news/detail-772853.html
OLED_ShowHZ(1,2,18);//ÈÕ
OLED_ShowHZ(1,4,20);//ÆÚ
OLED_ShowNum(1,7,year,4);//2023
OLED_ShowHZ(1,11,22);//Äê
OLED_ShowNum(1,13,month,2);//11
OLED_ShowHZ(1,15,24);//ÔÂ
OLED_ShowNum(2,1,day,2);//20
OLED_ShowHZ(2,3,26);//ÈÕ
OLED_ShowNum(2,5,hour,2);//15
OLED_ShowHZ(2,7,30);//ʱ
OLED_ShowNum(2,9,min,2);//40
OLED_ShowHZ(2,11,32);//·Ö
OLED_ShowNum(2,13,s,2);//s
OLED_ShowHZ(2,15,28);//Ãë
//OLED_ShowString(2,17,"Mon");
DHT11_REC_Data(); //½ÓÊÕdht11Êý¾Ý
OLED_ShowNum(3,10,rec_data[2]-5,2);
OLED_ShowNum(4,10,rec_data[0]-13,2);
s+=1;
if(s>=60)
{
s=0;
min++;
}
if(min>=60)
{
min=0;
hour++;
}
if(hour>=24)
{
hour=0;
day++;
}
if(day>=31)
{
month++;
day=1;
}
if(month>12)
{
year++;
month=1;
}
Delay_s(1);
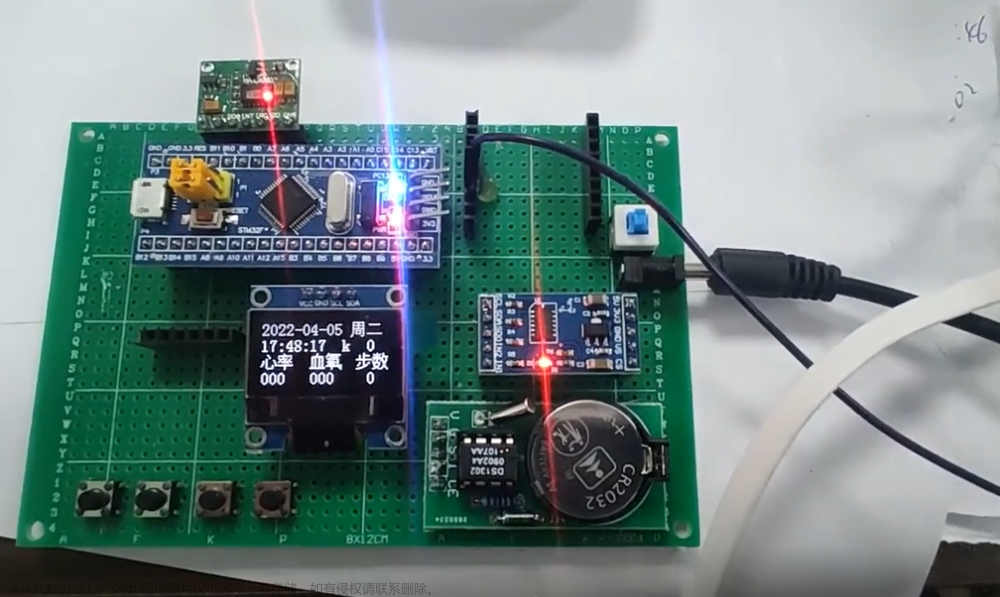
6.实验效果
6.1编译6.2烧录7.总结 在本次实验中,我成功地利用STM32微控制器和OLED显示屏实现了实时显示时间、温度和湿度的功能。通过这个实验,我收获了以下几点心得和总结: 首先,这个实验让我更加深入地了解了STM32微控制器的使用和编程。通过使用Keil进行开发,我学会了如何初始化微控制器、配置外设和编写驱动程序。这为我今后在嵌入式领域的学习和开发奠定了坚实的基础。 其次,我对OLED显示屏的原理和操作也有了更深入的了解。通过与STM32微控制器的连接和编程,我成功地实现了数据的显示和刷新。这个实验让我意识到OLED显示屏在嵌入式系统中的广泛应用,以及其显示效果和灵活性的优势。 此外,通过与AHT20温湿度传感器的结合,我成功地获取到了环境温度和湿度的数据,并通过OLED显示屏进行了实时显示。这个实验让我认识到传感器在嵌入式系统中的重要性,以及如何通过读取传感器数据并进行处理和显示。 总的来说,这个实验不仅让我对STM32微控制器、OLED显示屏和温湿度传感器有了更深入的了解,还提升了我的嵌入式系统开发能力和编程技巧。我相信这些知识和经验将对我今后的学习和工作产生积极的影响。 通过这个实验,我也明确了自己在嵌入式领域的兴趣和发展方向。我将继续深入学习和探索STM32微控制器和相关技术,不断提升自己的能力,为嵌入式系统的开发和应用做出更多的贡献。
到了这里,关于【嵌入式】STM32进阶-OLED显示时间+温度和湿度的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!