目录
前言
项目背景与简介
主要设计思路
一、算法理论技术
1.1 神经网络基础
1.2 深度神经网络
1.3 目标检测
二、数据处理
2.1 数据采集
三、实现的效果
更多帮助
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
最新最全计算机专业毕设选题精选推荐汇总
大家好,这里是海浪学长毕设专题,本次分享的课题是:
🎯计算机视觉:复杂场景下的车牌识别系统
项目背景与简介
车牌识别系统可以应用于交通管理领域,例如交通监控、智能交通系统等。通过准确识别车辆的车牌号码,可以实现交通违法行为的自动检测、车辆追踪和定位等功能,提高交通管理效率和交通安全性。通过图像处理和机器学习技术,实现在复杂背景下准确、高效地检测和识别车辆车牌号码的系统。
主要设计思路
一、算法理论技术
1.1 神经网络基础
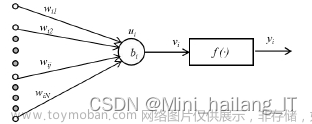
深度学习始于神经网络,神经网络始于感知器。感知器以一个向量作为输入,然后对向量的每一个维度进行权值积的累加并加上偏移量,得到的值作为激活函数的输入,经过激活函数处理后得到最终的输出值。

神经网络在感知器的基础上发展而来,由若干个感知器组成。神经网络的基本数据结构叫做层(layer),层表示一个数据处理模块,能够将若干个输入张量转换为输出张量,而由多个这样的layer组成的有向无环图构成了基本的神经网络。神经网络的损失函数和优化器分别决定了当前任务是否完成和如何基于损失函数进行网络更新。整个神经网络的目标是最小化最终损失。神经网络中的激活函数将每一层的张量进行非线性映射,这种非线性变换保证了理论上神经网络层数与最终效果呈正相关的效果。

1.2 深度神经网络
神经网络通过一种渐进的、逐层的方式形成越来越复杂的表示并且对中间的这些渐进的网络层共同学习,每一层的变化都需要同时考虑前后两层的参数变化。初始的输入数据经过整个神经网络逐层运算,最终得到输出层的结果,该过程称为正向传播。然而正向传播得到的结果值与期望值有一定的偏差,神经网络再根据偏差以及损失函数,由输出层向输入层反向传播误差梯度,并更新网络权值,使得正向传播得到的结果更符合期望值,这个过程称为反向传播。
1.3 目标检测
目标检测任务是计算机视觉领域中的重要组成部分。其目的是在给定的图片中能够准确的定位到预定义的目标的位置并返回位置坐标。对于同一张图片中可能存在多个目标的情况称为多目标检测任务。

经过车牌检测网络检测到的车牌经常会由于拍摄角度或车牌本身扭曲发生各种各样的形变,这导致神经网络难以正确的提取特征,对后面的车牌字符识别模块正确识别字符产生了很大的干扰。为了解决这个问题,需要对检测到的车牌进行矫正,将扭曲的车牌转换为正面视角。最后是图像采样器(image sampling),该部分网络以特征图和网格生成器中的网格作为输入,生成从输入网格点采样的输出映射特征。定位网络、网格发生器以及采样器共同组成了空间转换网器。

经过空间变换网络矫正之后,车牌图像将会全部被转换为近似正面视图,为车牌识别网络提供了便利。为保证本章设计的端到端自动车牌识别系统的实时性,保证模型能够在相同时间内能够处理更多的帧数。车牌识别模块采取轻量型的RPNet。该识别网络将在传递过来的特征图中提取ROI,之后在该区域提取到122×122、63×63、33×33三种尺寸的特征映射,最后将特征映射通过池化网络池化为固定大小(16×8)的特征图并进行组合,最后将组合后的特征图传递给分类器,分类器识别字符内容之后组成预测的车牌字符序列。

在整个模型的架构中,空间变换网络作为一个相对独立模块插入到识别网络中444为了获得字符均衡、种类多样的车牌训练数据集,生成了3000张图像。该方法充分利用车牌先验知识调节车牌字符概率,并采用多种不同类型的车牌背景模板,有效提高了模型的识别精度和鲁棒性。

二、数据处理
2.1 数据采集
由于网络上没有现有的合适的数据集,我决定亲自进行拍摄,以收集图片并创建一个专门用于复杂背景下车牌识别系统的全新数据集。捕捉了真实场景和多样的工作环境,包括繁忙的交通、夜晚街道和恶劣天气等。特别关注车牌所处的复杂背景和受到的各种干扰,如光照条件、角度和遮挡物。同时,考虑了车辆和车牌的多样性,以涵盖不同类型和地区的车牌。这样的数据采集过程为复杂背景下车牌识别系统的研究提供了有力支持,促进了该领域的发展和创新。

在无约束场景中,车牌图像拍摄受到很多的因素干扰,包括复杂的环境如雨雪天气和街道背景,不同的拍摄视角导致的车牌形状变形等等。这些客观因素都会使得车牌检测的复杂性大大提高。然而无论场景如何复杂,车牌在图片中的表现形式都是一个有着纹理特征的矩形框。

三、实现的效果
提出的模型能够适应各种非约束的场景,各种不同类型、颜色、格式的车牌,并能够在多车辆场景中过滤掉未包含完整车牌信息的车辆目标,充分展示了提出模型的准确性与鲁棒性。

对于输入图像中的偏转视角车牌,本模型能够将其矫正为正面视角并在页面中呈现出来,为后续的车牌字符识别模块提供了有利条件,充分说明了模型车牌检测与矫正模块的有效性。而对于图中不包含完整车牌信息的背景车辆,模型能够对其有效的剔除,只在展示页面中显现包含完整车牌信息的车辆以及对应的车牌识别结果,充分说明了改进后的模型对车辆检测后处理的合理性与有效性。文章来源:https://www.toymoban.com/news/detail-774334.html
 文章来源地址https://www.toymoban.com/news/detail-774334.html
文章来源地址https://www.toymoban.com/news/detail-774334.html
更多帮助
到了这里,关于毕业设计选题-计算机视觉:复杂场景下的车牌识别系统 人工智能 深度学习 YOLO的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[毕业设计]最新最全计算机专业毕业设计选题推荐精选汇总](https://imgs.yssmx.com/Uploads/2024/02/731352-1.png)











