前言
关于printf函数和fputc函数联系和区别
联系:
1.共同目标:
printf 函数和 fputc 函数都用于将字符输出到指定的输出流中。
2.字符输出:
两个函数都可以用于输出一个字符,但在实际使用时,printf 函数通常用于输出格式化的数据,而 fputc 函数更常用于单个字符的直接输出。
区别:
1.功能差异:
printf 函数提供了更高级别的功能,可进行格式化输出、数值转换、对齐等操作。而 fputc 函数仅仅将单个字符写入到指定的输出流中。
2.参数类型:printf 函数接受格式化字符串和可变参数列表作为参数,因此可以输出多个不同类型的数据。而 fputc 函数接受一个字符和指向输出流的指针作为参数。
3.使用场景:由于 printf 函数提供了丰富的格式控制和数据转换功能,通常用于日常的输出和调试。而 fputc 函数更适合在特定情况下,直接将单个字符输出到指定设备或文件中。
为什么在stm32中要重定向printf函数?
在STM32微控制器中,printf 函数是用于将格式化的字符串输出到标准输出的函数。然而,默认情况下,STM32芯片并没有直接连接一个用于标准输出的终端设备,如串口或LCD显示屏。因此,为了使用 printf 函数来输出调试信息或结果,需要对其进行重定向。
====================================================
其实在printf函数内部来说,是封装了一个fputc函数来进行字符输出操作
所以这就是本节内容,如何在stm32中重定向printf,就是重定向fputc函数,本节使用串口实现,直接看代码实现
直接在你写的usart.c中添加即可
//重定向fputc函数
int fputc(int ch, FILE *f) //两个标准参数
{
//将要发送的数据通过串口1发送出来(可以用电脑上的串口调试软件接收)
USART_SendData(USART1, ch);
//等待发送是否完成
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
return ch;
}
如何找到这个函数和函数详解如下:

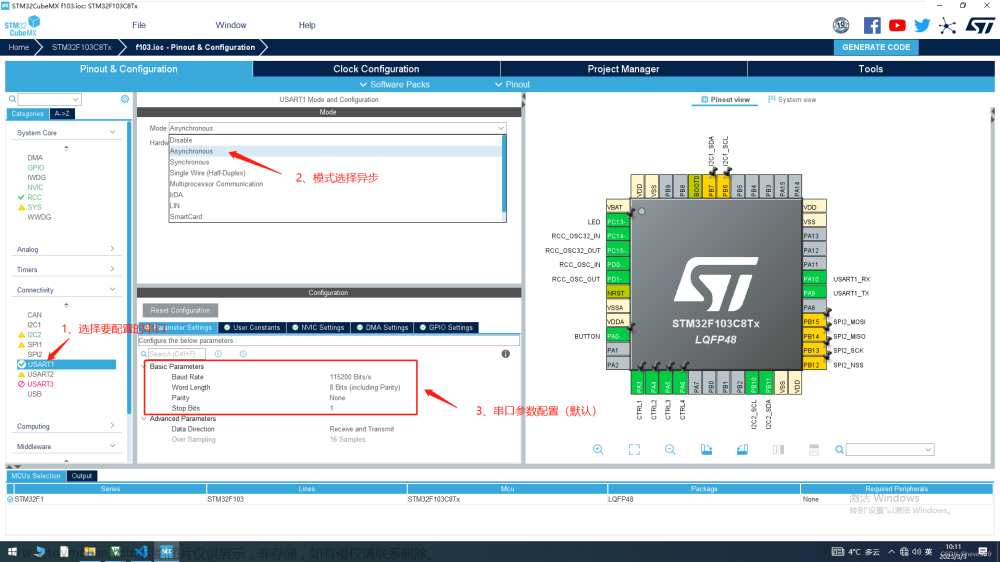
以下是关于STM32F4芯片给的寄存器手册,具体查找为何要这样重写

根据上图,我已经把为何重定向和如何重定向,以及重定向函数参数都做了仔细解读
使用:
1.直接在main函数直接使用printf函数即可(其他地方也可以使用,注意添加头文件)
int main(void)
{
Usart1_Init();
while(1)
{
//添加好stdio.h头文件之后,就可以正常使用printf函数了,方便以后调试
printf("你好,热爱代码陌生人!\n");
delay_ms(1000);
}
2.在编译的时候勾选标准c微库
3.即可在电脑上的调试助手看到打印的数据
注意:
1.打印的是乱码,原因如下文章来源:https://www.toymoban.com/news/detail-774844.html
- 波特率设置不匹配:在使用串口进行输出时,波特率必须与目标终端设备(例如PC)的波特率匹配。请确保在初始化串口时,将波特率设置为与终端设备相同的值。
- 时钟配置错误:串口通信涉及到时钟的配置。如果时钟配置错误,数据传输可能会出错,导致输出结果乱码。请仔细检查时钟配置是否正确。
- IO引脚配置错误:如果将串口的TX引脚连接到错误的引脚上,或者配置了错误的引脚复用功能,也可能导致输出乱码。请确保将TX引脚连接到正确的引脚,并正确配置引脚复用功能。
- 缓冲区溢出:如果使用的缓冲区大小不足以容纳输出的数据量,可能会导致数据溢出,从而产生乱码。请确保使用足够大的缓冲区。
- 中断优先级设置错误:如果串口中断的优先级设置得不正确,可能会导致数据传输错误,进而导致输出乱码。请确保中断优先级设置正确。
如此,STM32F4中printf函数重定向已经完成,具体芯片还是要看具体的函数和寄存器进行重写
最后如果觉得文章对您有帮助,请留下您免费的赞,祝生活开心!文章来源地址https://www.toymoban.com/news/detail-774844.html
到了这里,关于关于STM32F4系列中printf重定向问题详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!