HC05蓝牙模块
一、概述
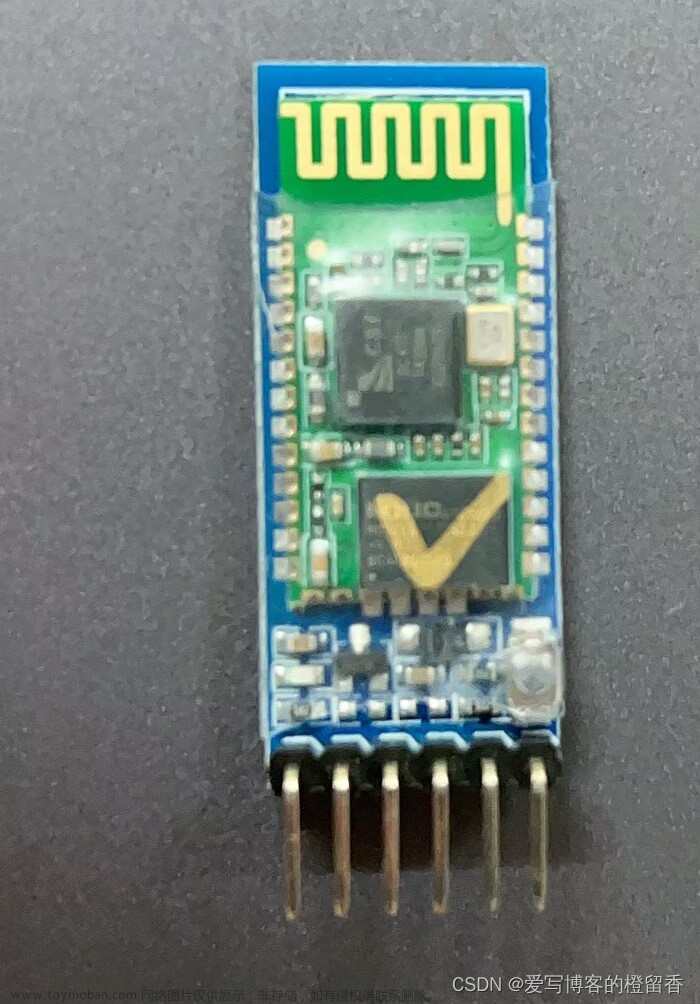
模块基于蓝牙v2.0带EDR蓝牙协议,采用CSR的BC417芯片,工作于2.4GHzISM频段,GFSK调制方式。模块配对后可当一条有限串口线使用。只要以固定波特率、8位数据位、无奇偶校验的通信格式,模块都可以取代传统的串口线,无需修改程序,省去布线工作,使用非常灵活。可以与带蓝牙的电脑、安卓手机、蓝牙主机配对使用。
二、引脚说明
| EN(KEY) | 为AT指令设置脚,和按键功能相同,按键相当于将34脚拉高拉低,配合AT指令使用,大部分AT指令,需要按下按键发送才有效 |
|---|---|
| VCC | 电源正,3.2~6V供电 |
| GND | 电源负,接地 |
| TXD | 数据发送端 |
| RXD | 数据接收端 |
| STATE | 蓝牙状态输出引脚,未连接时输出低电平,连接时输出高电平 |
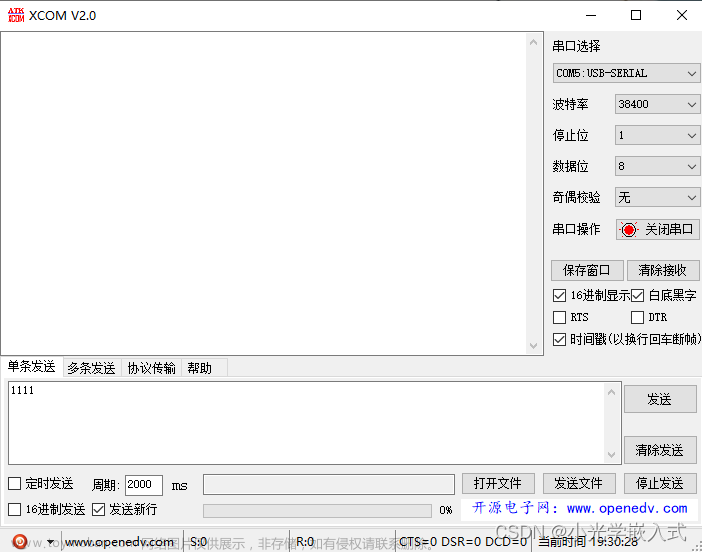
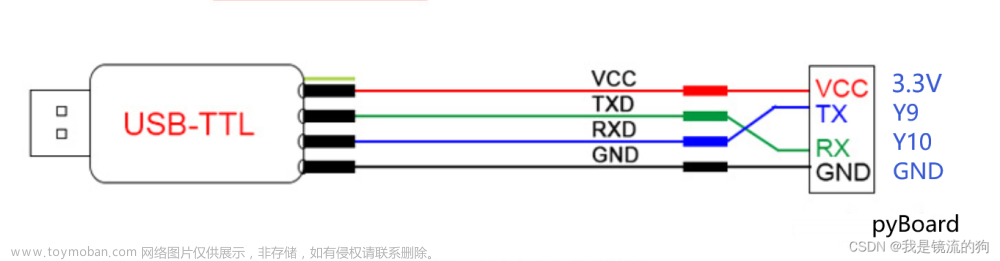
三、进入AT模式
USB转TTL和蓝牙模块连接好后,插上电脑。(这里仅用4根杜邦线连接即可)
进入AT模式的两种方法。
-
方法一:先按住按键不放,再给模块上电。此时LED 2S闪一次,进入AT模式。波特率固定为38400。
-
方法二:模块直接上电。此时LED灯快闪(1s两次)。再按下按键,模块也会进入AT指令,此时LED还是快闪。这个时候的波特率和自己设置的一样,默认为9600。1位停止位,无奇偶校验。
四、常用AT指令
(一)测试通信是否有问题
发送: AT
返回:OK
(二)设置波特率
AT+UART=<Param>,<Param2>,<Param3>
-
Param1:波特率(bits/s)
取值如下(十进制):4800,9600,19200,38400,57600,115200,23400,460800,921600,1382400
-
Param2:停止位
0——1 位
1——2 位
-
Param3:校验位
0——None
1——Odd
2——Even
例:设置波特率为115200,1位停止位,0位效验位
AT+UART=115200,0,0
(三)查询波特率
AT+UART?
(四)设置蓝牙名称
发送:AT+NAME=xxx(默认名称HC-05)
返回:OK
(五)查询蓝牙名称
AT+NAME?
(六)设置蓝牙密码
发送:AT+PSWD=XXXXXX(默认密码1234)
返回:OK
(七)查询蓝牙密码
AT+PSWD?
(八)设置蓝牙角色
AT+ROLE=<Param>//默认从机
-
Param:参数取值如下:
0——从角色(Slave)
1——主角色(Master)
2——回环角色(Slave-Loop)
默认值:0
(九)查询蓝牙角色
AT+ROLE?
其他详见HC05指令集
五、蓝牙串口通信代码
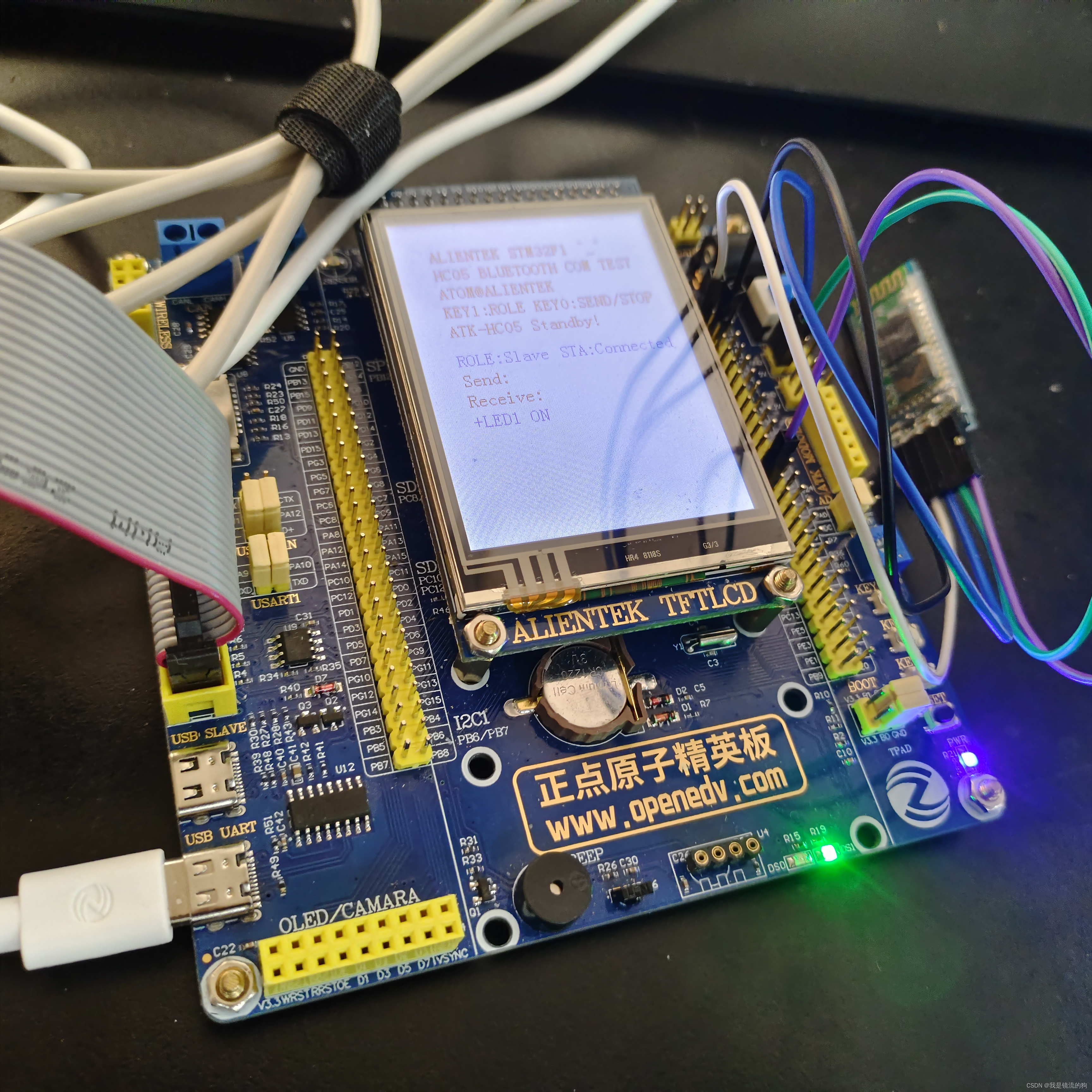
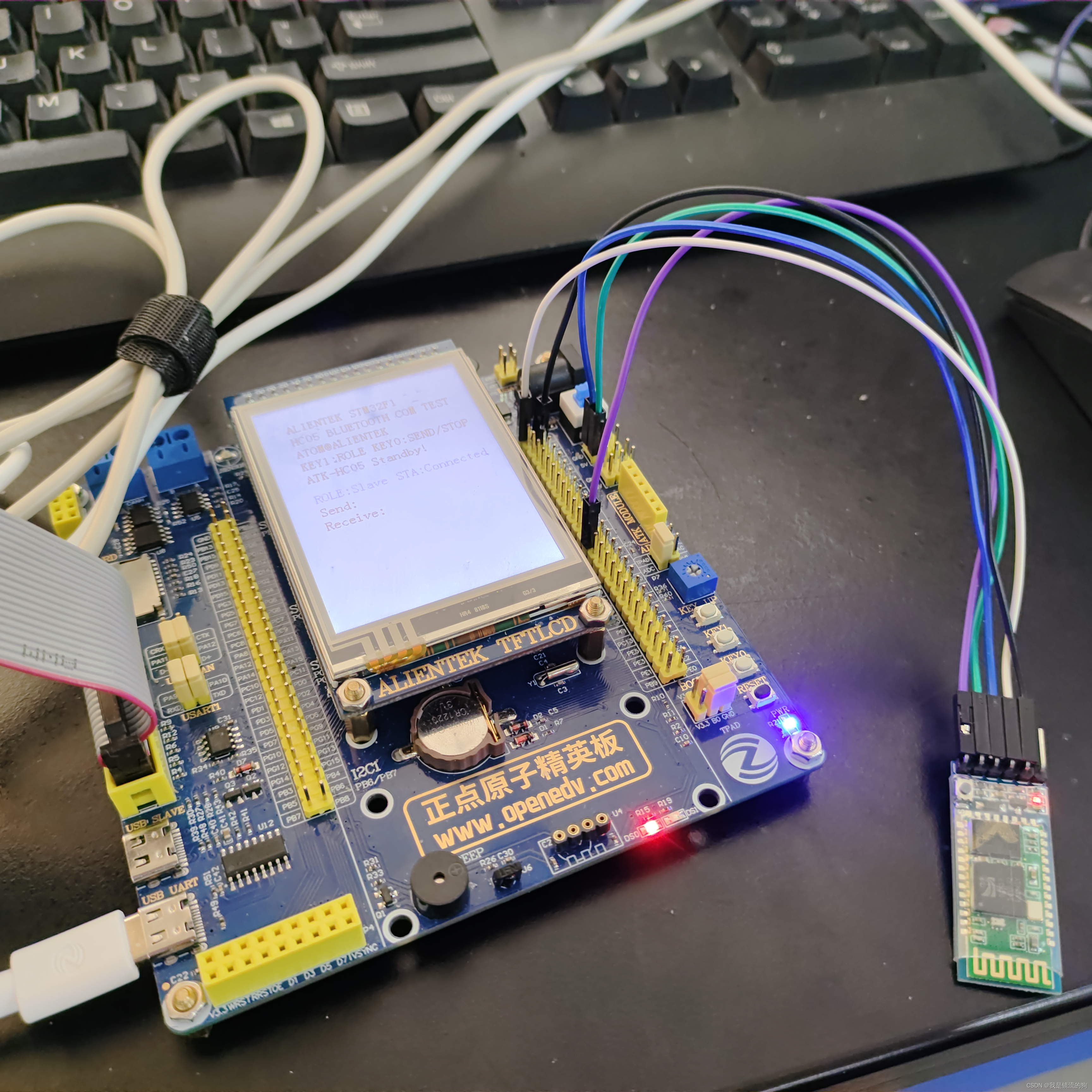
(一)实验现象
- 通过STM32F1的USART3连接ATK-HC05蓝牙模块,检测并显示蓝牙模块的状态.
- 通过KEY0按键可以开启/关闭定时向ATK-HC05蓝牙模块发送数据(ALIENTEK HC05 xx)测试蓝牙模块的数据发送.
- 可以通过KEY1按键设置ATK-HC05蓝牙模块的主从工作模式.
- 可以通过LCD显示ATK-HC05蓝牙模块接收到的数据.
- 可以通过USMART对ATK-HC05蓝牙模块进行AT指令查询和设置.
- 结合手机端蓝牙软件(蓝牙串口助手 v1.97.apk),可以实现手机无线控制开发板(点亮和关闭LED1).
注意:如果按下KEY1使蓝牙进入主机模式将无法使用其他功能,需要再按下一次使蓝牙变为从机
手机连接蓝牙后输入"+LED1 ON"使LED灯亮
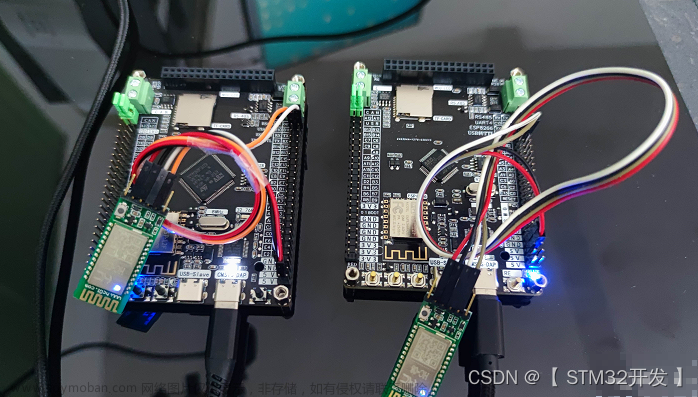
(二)HC05与STM32精英版连接
- RXD→PB10
- TXD→PB11
- GND→GND
- VCC→5V
- EN→PA4(注意:这里不接的话,需要手动按下HC05的按键)
(三)代码
hc05.h
#ifndef __HC05_H
#define __HC05_H
#include "sys.h"
#define HC05_KEY PAout(4) //蓝牙控制KEY信号
#define HC05_LED PAin(15) //蓝牙连接状态信号
u8 HC05_Init(void);
void HC05_CFG_CMD(u8 *str);
u8 HC05_Get_Role(void);
u8 HC05_Set_Cmd(u8* atstr);
#endif
hc05.c(注意在hc05.c中HC05_Init()我把串口3的波特率改为了115200)
#include "delay.h"
#include "usart.h"
#include "usart3.h"
#include "hc05.h"
#include "led.h"
#include "string.h"
#include "math.h"
//初始化ATK-HC05模块
//返回值:0,成功;1,失败.
u8 HC05_Init(void)
{
u8 retry=10,t;
u8 temp=1;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能PORTA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化A15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA4
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
HC05_KEY=1;
HC05_LED=1;
usart3_init(115200); //初始化串口2为:9600,波特率.
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("AT\r\n"); //发送AT测试指令
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<10;t++) //最长等待50ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==4&&USART3_RX_BUF[0]=='O'&&USART3_RX_BUF[1]=='K')
{
temp=0;//接收到OK响应
break;
}
}
}
if(retry==0)temp=1; //检测失败
return temp;
}
//获取ATK-HC05模块的角色
//返回值:0,从机;1,主机;0XFF,获取失败.
u8 HC05_Get_Role(void)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("AT+ROLE?\r\n"); //查询角色
for(t=0;t<20;t++) //最长等待200ms,来接收HC05模块的回应
{
delay_ms(10);
if(USART3_RX_STA&0X8000)break;
}
HC05_KEY=0; //KEY拉低,退出AT模式
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==13&&USART3_RX_BUF[0]=='+')//接收到正确的应答了
{
temp=USART3_RX_BUF[6]-'0';//得到主从模式值
break;
}
}
}
if(retry==0)temp=0XFF;//查询失败.
return temp;
}
//ATK-HC05设置命令
//此函数用于设置ATK-HC05,适用于仅返回OK应答的AT指令
//atstr:AT指令串.比如:"AT+RESET"/"AT+UART=9600,0,0"/"AT+ROLE=0"等字符串
//返回值:0,设置成功;其他,设置失败.
u8 HC05_Set_Cmd(u8* atstr)
{
u8 retry=0X0F;
u8 temp,t;
while(retry--)
{
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("%s\r\n",atstr); //发送AT字符串
HC05_KEY=0; //KEY拉低,退出AT模式
for(t=0;t<20;t++) //最长等待100ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(5);
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
if(temp==4&&USART3_RX_BUF[0]=='O')//接收到正确的应答了
{
temp=0;
break;
}
}
}
if(retry==0)temp=0XFF;//设置失败.
return temp;
}
///
//通过该函数,可以利用USMART,调试接在串口3上的ATK-HC05模块
//str:命令串.(这里注意不再需要再输入回车符)
void HC05_CFG_CMD(u8 *str)
{
u8 temp;
u8 t;
HC05_KEY=1; //KEY置高,进入AT模式
delay_ms(10);
u3_printf("%s\r\n",(char*)str); //发送指令
for(t=0;t<50;t++) //最长等待500ms,来接收HC05模块的回应
{
if(USART3_RX_STA&0X8000)break;
delay_ms(10);
}
HC05_KEY=0; //KEY拉低,退出AT模式
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
temp=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_STA=0;
USART3_RX_BUF[temp]=0; //加结束符
printf("\r\n%s",USART3_RX_BUF);//发送回应数据到串口1
}
}
usart3.h
#ifndef __USART3_H
#define __USART3_H
#include "sys.h"
#define USART3_MAX_RECV_LEN 600 //最大接收缓存字节数
#define USART3_MAX_SEND_LEN 600 //最大发送缓存字节数
#define USART3_RX_EN 1 //0,不接收;1,接收.
extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN字节
extern u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
extern vu16 USART3_RX_STA; //接收数据状态
void usart3_init(u32 bound); //串口2初始化
void u3_printf(char* fmt,...);
#endif
usart3.c文章来源:https://www.toymoban.com/news/detail-774919.html
#include "delay.h"
#include "usart3.h"
#include "stdarg.h"
#include "stdio.h"
#include "string.h"
#include "timer.h"
//串口接收缓存区
u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.
u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
//通过判断接收连续2个字符之间的时间差不大于10ms来决定是不是一次连续的数据.
//如果2个字符接收间隔超过10ms,则认为不是1次连续数据.也就是超过10ms没有接收到
//任何数据,则表示此次接收完毕.
//接收到的数据状态
//[15]:0,没有接收到数据;1,接收到了一批数据.
//[14:0]:接收到的数据长度
vu16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)//接收到数据
{
res =USART_ReceiveData(USART3);
if((USART3_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据
{
if(USART3_RX_STA<USART3_MAX_RECV_LEN) //还可以接收数据
{
TIM_SetCounter(TIM7,0);//计数器清空 //计数器清空
if(USART3_RX_STA==0) //使能定时器7的中断
{
TIM_Cmd(TIM7,ENABLE);//使能定时器7
}
USART3_RX_BUF[USART3_RX_STA++]=res; //记录接收到的值
}else
{
USART3_RX_STA|=1<<15; //强制标记接收完成
}
}
}
}
//初始化IO 串口3
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void usart3_init(u32 bound)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能
USART_DeInit(USART3); //复位串口3
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11
USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口 3
USART_Cmd(USART3, ENABLE); //使能串口
//使能接收中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
//设置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
TIM7_Int_Init(99,7199); //10ms中断
USART3_RX_STA=0; //清零
TIM_Cmd(TIM7,DISABLE); //关闭定时器7
}
//串口3,printf 函数
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt,...)
{
u16 i,j;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART3_TX_BUF); //此次发送数据的长度
for(j=0;j<i;j++) //循环发送数据
{
while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
USART_SendData(USART3,USART3_TX_BUF[j]);
}
}
main.c文章来源地址https://www.toymoban.com/news/detail-774919.html
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "lcd.h"
#include "usart.h"
#include "hc05.h"
#include "usart3.h"
#include "string.h"
#include "usmart.h"
//显示ATK-HC05模块的主从状态
void HC05_Role_Show(void)
{
if(HC05_Get_Role()==1)LCD_ShowString(30,140,200,16,16,"ROLE:Master"); //主机
else LCD_ShowString(30,140,200,16,16,"ROLE:Slave "); //从机
}
//显示ATK-HC05模块的连接状态
void HC05_Sta_Show(void)
{
if(HC05_LED)LCD_ShowString(120,140,120,16,16,"STA:Connected "); //连接成功
else LCD_ShowString(120,140,120,16,16,"STA:Disconnect"); //未连接
}
int main(void)
{
u8 t;
u8 key;
u8 sendmask=0;
u8 sendcnt=0;
u8 sendbuf[20];
u8 reclen=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为9600
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化按键
LCD_Init(); //初始化LCD
usmart_dev.init(72); //初始化USMART
POINT_COLOR=RED;
LCD_ShowString(30,30,200,16,16,"ALIENTEK STM32F1 ^_^");
LCD_ShowString(30,50,200,16,16,"HC05 BLUETOOTH COM TEST");
LCD_ShowString(30,70,200,16,16,"ATOM@ALIENTEK");
delay_ms(1000); //等待蓝牙模块上电稳定
while(HC05_Init()) //初始化ATK-HC05模块
{
LCD_ShowString(30,90,200,16,16,"ATK-HC05 Error!");
delay_ms(500);
LCD_ShowString(30,90,200,16,16,"Please Check!!!");
delay_ms(100);
}
LCD_ShowString(30,90,210,16,16,"KEY1:ROLE KEY0:SEND/STOP");
LCD_ShowString(30,110,200,16,16,"ATK-HC05 Standby!");
LCD_ShowString(30,160,200,16,16,"Send:");
LCD_ShowString(30,180,200,16,16,"Receive:");
POINT_COLOR=BLUE;
HC05_Role_Show();
delay_ms(100);
USART3_RX_STA=0;
while(1)
{
key=KEY_Scan(0);
if(key==KEY1_PRES) //切换模块主从设置
{
key=HC05_Get_Role();
if(key!=0XFF)
{
key=!key; //状态取反
if(key==0)HC05_Set_Cmd("AT+ROLE=0");
else HC05_Set_Cmd("AT+ROLE=1");
HC05_Role_Show();
HC05_Set_Cmd("AT+RESET"); //复位ATK-HC05模块
delay_ms(200);
}
}else if(key==KEY0_PRES)
{
sendmask=!sendmask; //发送/停止发送
if(sendmask==0)LCD_Fill(30+40,160,240,160+16,WHITE);//清除显示
}else delay_ms(10);
if(t==50)
{
if(sendmask) //定时发送
{
sprintf((char*)sendbuf,"ALIENTEK HC05 %d\r\n",sendcnt);
LCD_ShowString(30+40,160,200,16,16,sendbuf); //显示发送数据
u3_printf("ALIENTEK HC05 %d\r\n",sendcnt); //发送到蓝牙模块
sendcnt++;
if(sendcnt>99)sendcnt=0;
}
HC05_Sta_Show();
t=0;
LED0=!LED0;
}
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
LCD_Fill(30,200,240,320,WHITE); //清除显示
reclen=USART3_RX_STA&0X7FFF; //得到数据长度
USART3_RX_BUF[reclen]=0; //加入结束符
if(reclen==9||reclen==8) //控制DS1检测
{
if(strcmp((const char*)USART3_RX_BUF,"+LED1 ON")==0)LED1=0; //打开LED1
if(strcmp((const char*)USART3_RX_BUF,"+LED1 OFF")==0)LED1=1;//关闭LED1
}
LCD_ShowString(30,200,209,119,16,USART3_RX_BUF);//显示接收到的数据
USART3_RX_STA=0;
}
t++;
}
}
到了这里,关于HC05蓝牙模块(STM32)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!