1.接线
SG90带有一个3P的接头
根据颜色分为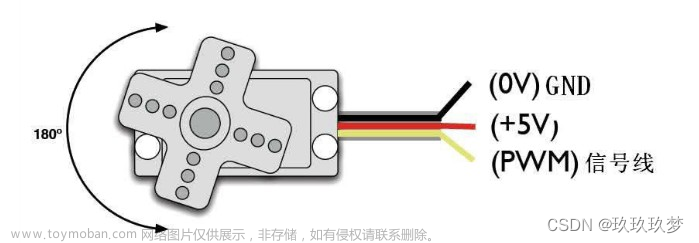
- 黄线(信号线)
- 红线(电源线)
- 棕色 (地线)
舵机的工作电压在4.8V-6V,接在STM32系统板上驱动不了,所以需要接电源模块单独的5V供电,我使用的是如图所示的电源模块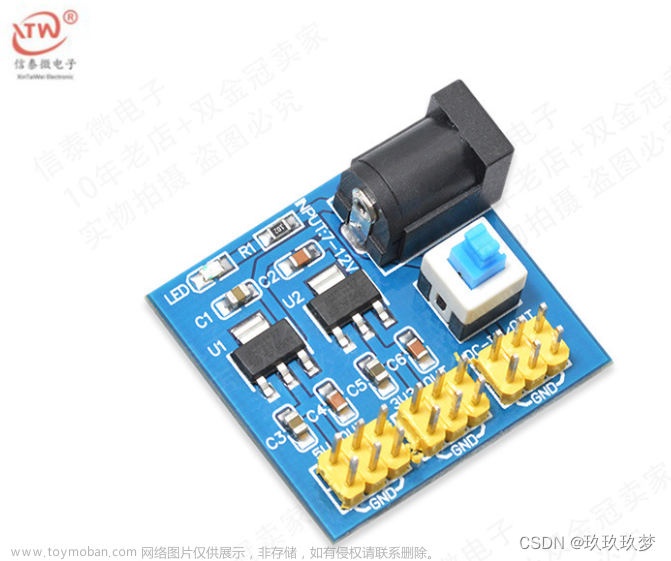
注:
如果STM32系统板供电和舵机供电不为同一模块,则需要共地,否则控制不成功!!!
2.舵机的控制
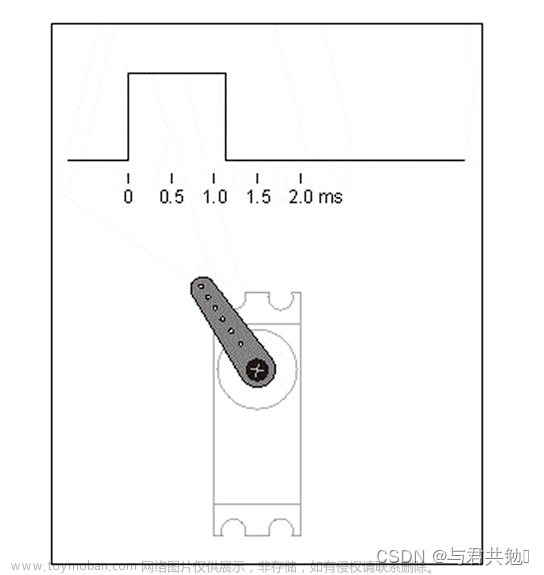
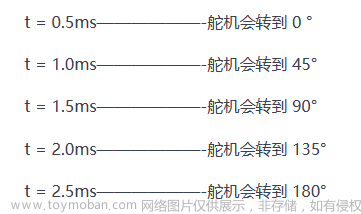
舵机的控制需要一个20ms左右的时基脉冲,该脉冲的高电平部分0.5ms到2.5ms控制舵机转动角度0°-180°呈线性变化。
控制原理:舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,通过比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
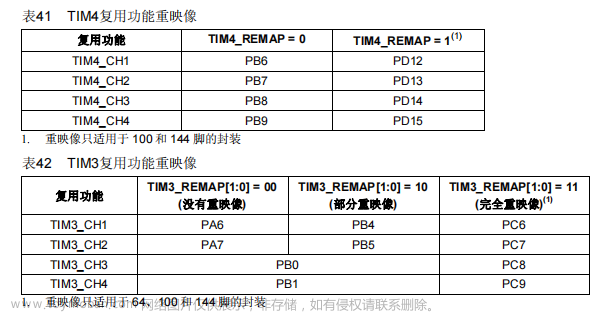
知道原理之后,让我们来编写驱动代码,首先需要一个总周期为20ms的时基脉冲,这里采用TIM3CH2(定时器3通道2)对应的GPIOB5作为输出控制信号
首先是PWM的基础配置
void TIM3_PWM_Init(u16 arr,u16 psc)//GPIOB5
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);//RCC配置GPIO,复用时钟 ->APB2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//TIM3->APB1
//GPIO初始化
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;//GPIOB5
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//设置部分重映射
//初始化TIM3
TIM_TimeBaseStruct.TIM_Period=arr;//定时器周期
TIM_TimeBaseStruct.TIM_Prescaler=psc;//预分频系数定时器周期
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStruct);
//设置比较通道CH2
/*
PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平,否则为有效电平。
*/
//PWM1极性高 向上记数 CNT小于CCR为高电平
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //PWM输出模式选择
TIM_OCInitStruct.TIM_Pulse=0; //通道比较值设定,可以自己设定
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; //极性选择 (有效电平为高/低)
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;//输出状态使能
TIM_OC2Init(TIM3,&TIM_OCInitStruct); //通道CH2 GPIOB5
//使能预装载寄存器
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //通道CH2 GPIOB5
//定时器使能
TIM_Cmd(TIM3,ENABLE);
}
然后根据需要的周期设置总记数值以及分频系数
void Sg90_Init(void){
//舵机控制总周期要求为20ms
//通过改变脉宽0.5ms-2.5ms代表0-180°
TIM3_PWM_Init(2000-1,720-1);
//2000*720/72M = 20000us = 20ms
}
然后通过改变比较值来改变舵机转动的角度
void SetAngle(int angle){
//angle 范围为0-180
if(angle >= 0 || angle <= 180){
//总记数值为2000 比较值50-250代表0°-180°
TIM_SetCompare2(TIM3,50+(200*angle/180));//修改定时器3通道2的比较值
}
}
附带一个测试函数
void Sg90_Test(void){//运行一次角度+10° 大于180°时重新从0开始
static int n = 0;
n += 10;
SetAngle(n%180);
}
main.c
sys.h为官方库函数文件
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "sg90.h"
int main()
{
delay_init();
LedInit();
Sg90_Init();
while(1)
{
delay_ms(500);
LED1 = ~LED1;
Sg90_Test();
}
}
这里使用了板载的LED灯,监测运行是否正常。文章来源:https://www.toymoban.com/news/detail-776427.html
sg90.c
#include "sg90.h"
/*********
SG90控制
GPIOB5
*********/
void Sg90_Init(void){
//舵机控制总周期要求为20ms
//通过改变脉宽0.5ms-2.5ms代表0-180°
TIM3_PWM_Init(1999,719);
//2000*720/72M = 20000us = 20ms
}
void TIM3_PWM_Init(u16 arr,u16 psc)//GPIOB5
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);//RCC配置GPIO,复用时钟 ->APB2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//TIM3->APB1
//GPIO初始化
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;//GPIOB5
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//设置部分重映射
//初始化TIM3
TIM_TimeBaseStruct.TIM_Period=arr;//定时器周期
TIM_TimeBaseStruct.TIM_Prescaler=psc;//预分频系数定时器周期
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStruct);
//设置比较通道CH2
/*
PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平,否则为有效电平。
*/
//PWM1极性高 向上记数 CNT小于CCR为高电平
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //PWM输出模式选择
TIM_OCInitStruct.TIM_Pulse=0; //通道比较值设定,可以自己设定
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; //极性选择 (有效电平为高/低)
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;//输出状态使能
TIM_OC2Init(TIM3,&TIM_OCInitStruct); //通道CH2 GPIOB5
//使能预装载寄存器
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //通道CH2 GPIOB5
//定时器使能
TIM_Cmd(TIM3,ENABLE);
}
void SetAngle(int angle){
//angle 范围为0-180
if(angle >= 0 || angle <= 180){
//总记数值为2000 比较值50-250代表0°-180°
TIM_SetCompare2(TIM3,50+(200*angle/180));//修改定时器3通道2的比较值
}
}
void Sg90_Test(void){//运行一次角度+10° 大于180°时重新从0开始
static int n = 0;
n += 10;
SetAngle(n%180);
}
sg90.h
#ifndef __SG90_H_
#define __SG90_H_
#include "sys.h"
void Sg90_Init(void);
void SetAngle(int angle);
void Sg90_Test(void);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif //__SG90_H_
led.c
#include "led.h"
void LedInit(void)
{
//库函数版本
GPIO_InitTypeDef GPIO_InitStructor;
//开启硬件时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
//配置IO 推挽输出,输出速度
GPIO_InitStructor.GPIO_Pin=GPIO_Pin_13;
GPIO_InitStructor.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructor.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructor);
}
led.h
#ifndef __LED_H_
#define __LED_H_
#include "sys.h"
#define LED1 PCout(13)
void LedInit(void);
#endif //__LED_H_
附带项目总体文件
点击下载项目文件
链接:https://pan.baidu.com/s/1SlVU4H5foOcHIOLDQ_t5NQ?pwd=6666
提取码:6666文章来源地址https://www.toymoban.com/news/detail-776427.html
到了这里,关于SG90舵机的使用--STM32F103C8T6的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!