CubeMX平衡小车01——基于FreeRTOS实现串口接收数据
一、实现功能及实验环境
1.实现功能
手机数据——>HC05——>USART2——>STM32解析收到的数据——>USART1——>电脑串口软件显示4个SHORT
①数据格式
手机数据为12字节,包头为0xA5、包尾为0x5A、倒数第二位为校验位(为纯数据低八位的和)
②手机端APP

③电脑串口软件显示4个SHORT

2.实验环境
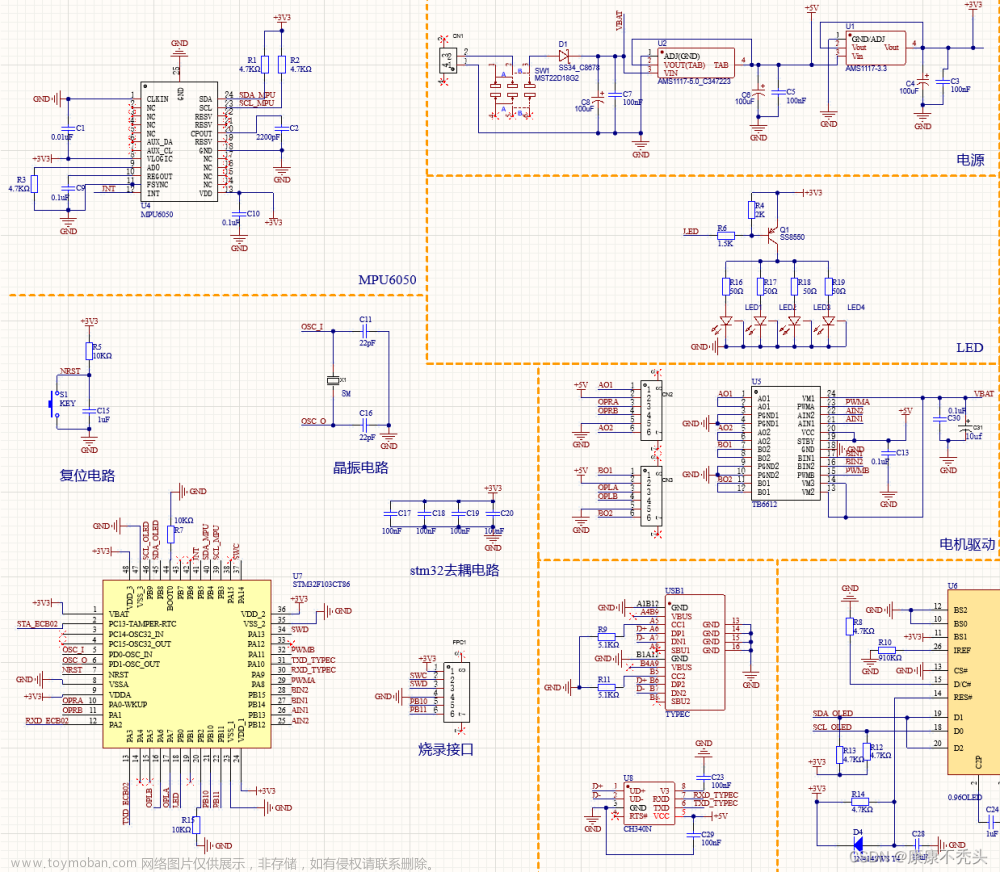
开发板为STM32F103CCU6
连接方式:串口2通过蓝牙HC05接受数据,串口1通过左侧USB口连接电脑
二、串口接收基础
1.阻塞式
占用资源
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(HAL_OK == HAL_UART_Receive(&huart2, (uint8_t *)recv_buff, 12, 0xFFFF))
{
//可以自由对recv_buff进行操作
}
}
2.中断式
全部放到mian.c中
main()
{
HAL_UART_Receive_IT(&huart2, (uint8_t *)recv_buff, 12);//开启串口2中断
while (1)
{
//可以进行其他操作
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Receive_IT(&huart2, (uint8_t *)recv_buff, 12);//开启串口2中断
if(VerifyData(recv_buff, 12))
{
GetPIDFromHC05(recv_buff);
printf("%d,%d,%d,%d\r\n", PIDFromHC05.BalanceKP, PIDFromHC05.BalanceKD, PIDFromHC05.SpeedKP, PIDFromHC05.SpeedKI);
}
}
3.DMA式
将中断式中_IT换成_DMA即可,不要忘了在CubeMX中开启串口2的DMA即可
三、串口数据处理
手机端发送
1.校验
只有校验完成,才能认为接受到的数据是我想要的,而不是干扰
/***********************************************************
*@fuction :VerifyData
*@brief :对数据进行校验
*@param :data为数据,dataBIT为位数
*@return :返回1验证通过
*@author :--
*@date :2023-07-19
***********************************************************/
char VerifyData(uint8_t *data, uint8_t dataBIT)
{
uint8_t sumdata = 0;
int datak;
if(data[0] == 0xa5 && data[dataBIT - 1] == 0x5a)//首先确保包头、包尾是对的
{
for(datak = 1; datak < 10; datak++)
{
sumdata = sumdata + data[datak];
}
if(sumdata == data[datak])//校验和也是对的
{
return 1;
}
return 0;
}
return 0;
}
2.取数据
定义结构体
struct HC05_PID_DATA
{
uint8_t LedStatus;
short BalanceKP;
short BalanceKD;
short SpeedKP;
short SpeedKI;
};
struct HC05_PID_DATA PIDFromHC05;
利用结构体取数据
void GetPIDFromHC05(uint8_t *data)
{
PIDFromHC05.LedStatus = data[1];
PIDFromHC05.BalanceKP = data[3] << 8 | data[2];
PIDFromHC05.BalanceKD = data[5] << 8 | data[4];
PIDFromHC05.SpeedKP = data[7] << 8 | data[6];
PIDFromHC05.SpeedKI = data[9] << 8 | data[8];
}
四、FreeRTOS二值信号量
1.在CubeMX中设置,直接在keil中生成

#include "cmsis_os.h"
extern osSemaphoreId_t myBinarySem_rxokHandle;
2.释放二值信号量
osSemaphoreRelease(myBinarySem_rxokHandle); //释放二值信号量
这个要放在中断中
3.等待二值信号量
osSemaphoreAcquire(myBinarySem_rxokHandle,osWaitForever);//等待二值信号量,只有等到了才会往下运行

我对二值信号量的理解:我认为就是一个信号FLAG,中断来了就发个信号,这个信号相当于一个全局变量
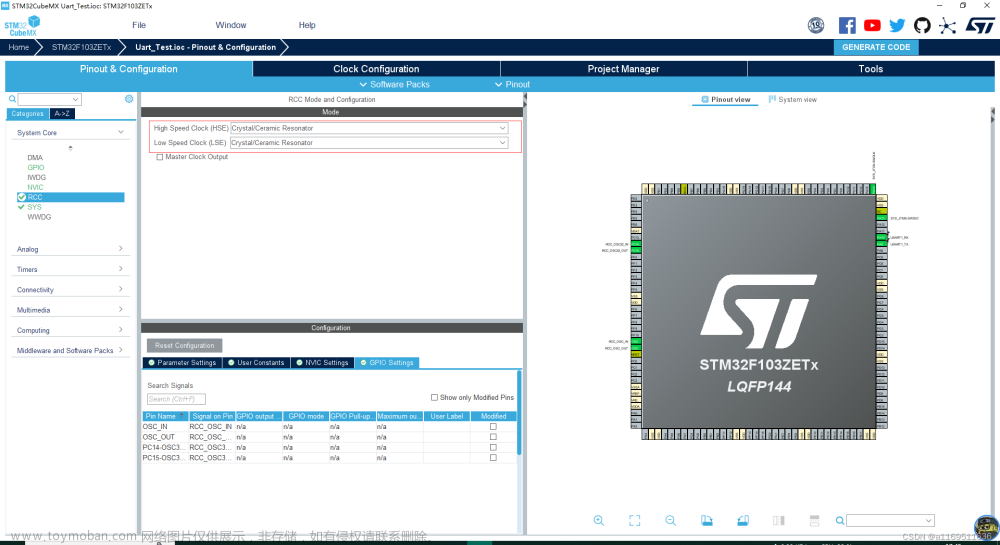
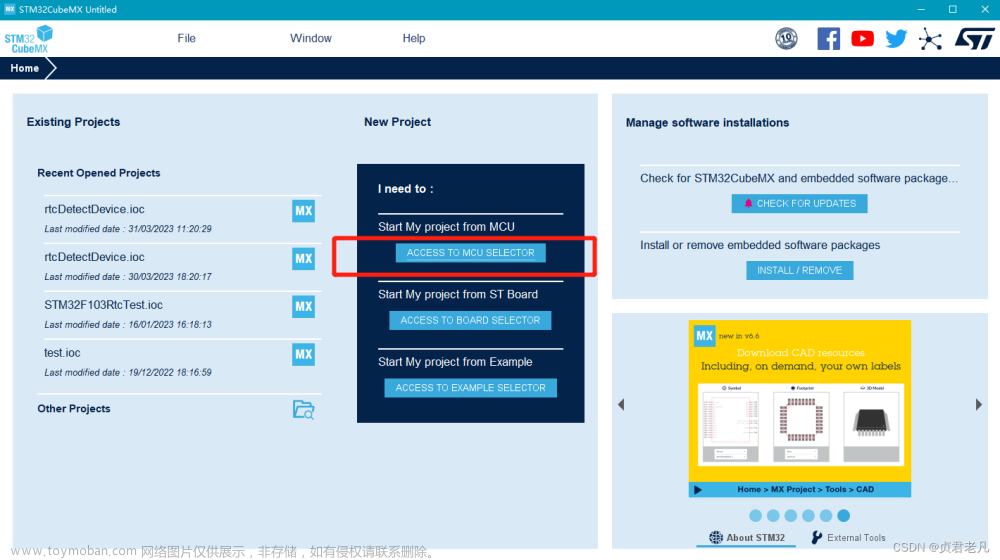
五、CubeMX设置
1.串口1设置
串口1不需要额外设置,波特率调为115200即可
2.串口2设置
串口2需开启DMA
3.freertos设置
任务随便设置几个,二值信号量参照第四部分
六、程序编写
1.main.h
/* USER CODE BEGIN Includes */
#include "myUsart.h"
#include "bluetooth_hc05.h"
/* USER CODE END Includes */
2.main.c
/* USER CODE BEGIN Includes */
uint8_t buf[12];
#include "cmsis_os.h"
extern osSemaphoreId_t myBinarySem_rxokHandle;
/* USER CODE END Includes */
/* USER CODE BEGIN 0 */
extern struct HC05_PID_DATA PIDFromHC05;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Receive_DMA(&huart2, buf, 12);
if(VerifyData(buf, 12) == 1)
{
GetPIDFromHC05(buf);
osSemaphoreRelease(myBinarySem_rxokHandle); //释放二值信号量
}
}
/* USER CODE END 0 */
/* USER CODE BEGIN 2 */
HAL_UART_Receive_DMA(&huart2, buf, 12);
printf("HC05 FreeRTOS TEST\r\n");
/* USER CODE END 2 */
3.myUsart.c文章来源:https://www.toymoban.com/news/detail-777316.html
#include "myUsart.h"
#include "stm32f4xx_hal.h"
#include "usart.h"
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
4.bluetooth_hc05.c文章来源地址https://www.toymoban.com/news/detail-777316.html
#include "bluetooth_hc05.h"
struct HC05_PID_DATA PIDFromHC05;
char VerifyData(uint8_t *data, uint8_t dataBIT)
{
uint8_t sumdata = 0;
int datak;
if(data[0] == 0xa5 && data[dataBIT - 1] == 0x5a)
{
for(datak = 1; datak < 10; datak++)
{
sumdata = sumdata + data[datak];
}
if(sumdata == data[datak])
{
return 1;
}
return 0;
}
return 0;
}
void GetPIDFromHC05(uint8_t *data)
{
PIDFromHC05.LedStatus = data[1];
PIDFromHC05.BalanceKP = data[3] << 8 | data[2];
PIDFromHC05.BalanceKD = data[5] << 8 | data[4];
PIDFromHC05.SpeedKP = data[7] << 8 | data[6];
PIDFromHC05.SpeedKI = data[9] << 8 | data[8];
}
omHC05.LedStatus = data[1];
PIDFromHC05.BalanceKP = data[3] << 8 | data[2];
PIDFromHC05.BalanceKD = data[5] << 8 | data[4];
PIDFromHC05.SpeedKP = data[7] << 8 | data[6];
PIDFromHC05.SpeedKI = data[9] << 8 | data[8];
}
到了这里,关于STM32平衡小车01——基于FreeRTOS实现串口接收数据(HC05)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
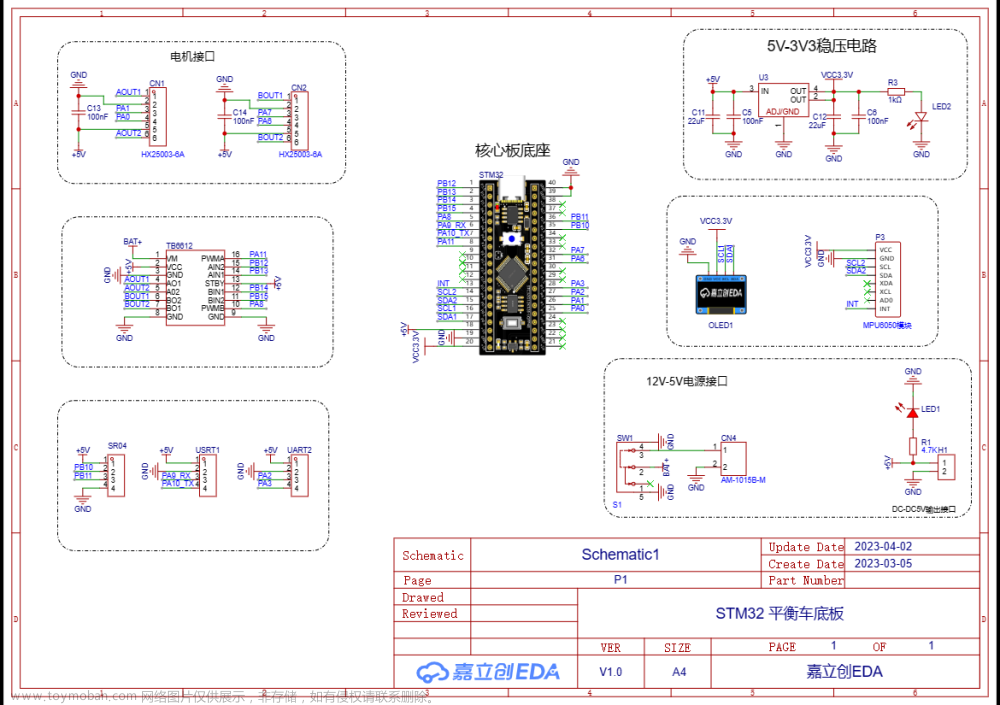
![[CubeMX项目]基于STM32的平衡小车(硬件设计)](https://imgs.yssmx.com/Uploads/2024/02/779549-1.png)