工作不是搞这个的,只是感兴趣,哈哈,做了一个小实验;记录一下实验过程吧!
一、实验部分
1、发送部分
使用的是正点原子STM32F103ZET6的主板,主板连接的硬件有DHT11(温度湿度模块) + BH1750(光照度采集模块)+ NRF2401(WIFI模块,主要是发送采集的数据到STMF103C8T6模块上,当然C8T6也连接一个NRF2401作为接收端);
2、接收部分
使用的是正点原子STMF103C8T6的最小系统板,主板连接的硬件有NRF2401(WIFI模块)+ esp8266(连接oneNET平台);
注意:esp8266做了单独的供电;用的串口调试的时候没带起来esp8266,发送指令失败,查找原因是供电不足;
3、硬件部分
下面是使用的模块:
BH1750

DHT11

OLED

esp8266

NRF24L01

实验图片

oneNET平台

支持六路通道的数据接收
1.低工作电压:1.9~3.6V低电压工作
2.高速率:2Mbps,由于空中传输时间很短,极大的降低了无线传输中的碰撞现象(软件设置1Mbps或者2Mbps的空中传输速率)
3.多频点:125 频点,满足多点通信和跳频通信需要
4.超小型:内置2.4GHz天线,体积小巧,15x29mm(包括天线)
5.低功耗:当工作在应答模式通信时,快速的空中传输及启动时间,极大的降低了电流消耗。
6.低应用成本:NRF24L01 集成了所有与RF协议相关的高速信号处理部分,比如:自动重发丢失数据包和自动产生应答信号等,NRF24L01的SPI接口可以利用单片机的硬件SPI口连接或用单片机I/O口进行模拟,内部有FIFO可以与各种高低速微处理器接口,便于使用低成本单片机。
二、实验功能
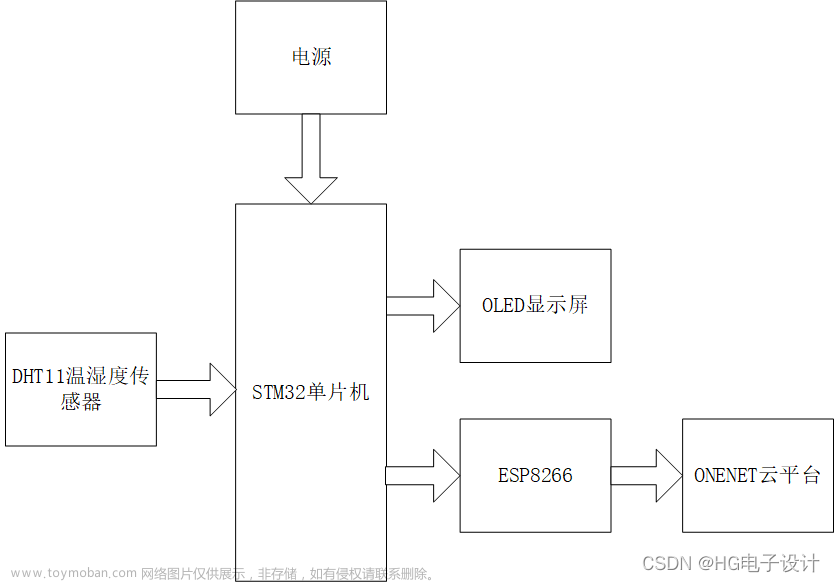
主要功能实现远距离传输数据并且显示在本地OLED屏幕上和oneNET平台上;实现物联网远距离通信显示;主要还是属于智能家居方面的吧;至于为什么使用NRF2401模块发送、接收,纯属是想用这个模块玩一玩;其实ZET6板子完全可以接上ESP8266模块直接上传;这样可以实现远程监测温湿度、水表什么的了,也可以加入控制功能;刚刚说了远距离传输,也查看了一些LORA的资料,低功耗、远距离传输很强大,也买了两个玩一玩;
对了,程序自己写了一部分,也copy一部分,改的我头大,磕磕绊绊总算搞出来了,也算是一种学习吧!模块的连接都是用的杜邦线,看着好乱的还给调试带来了麻烦,明明好使的,结果杜邦线松了,来来回回搞了好久,最好还是打个板子,省的调试麻烦;
1、ZET6主板采集温度湿度值、光照度的值,通过WIFI发送模块发送到C8T6主板上;C8T6主板也有一个WIFI接收模块,接收到温度湿度值、光照度的值显示在OLED上;同时C8T6最小系统板接了一个ESP8266模块,通过ESP8266模块发送数据到oneNET平台上,用于显示;
2、下面是代码,感兴趣鼓捣着玩的,可能有不足的地方,欢迎指正,共同进步;
三、实验代码
发送代码:
main文章来源地址https://www.toymoban.com/news/detail-778049.html
#include "./SYSTEM/sys/sys.h"
//#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./USMART/usmart.h"
#include "./BSP/LED/led.h"
#include "./BSP/DHT11/dht11.h"
#include "./BSP/BH1750/bh1750.h"
#include "./BSP/OLED/oled.h"
#include "./BSP/BEEP/beep.h"
#include "./BSP/TIMER/btim.h"
#include "./BSP/KEY/key.h"
#include "./BSP/EXTI/exti.h"
#include "./BSP/NRF24L01/nrf24l01.h"
uint8_t alarm_Free_Time = 10; /*报警标志*/
uint8_t alarm_Flag = 0; /*报警时间阈值*/
uint8_t t = 0;
uint8_t temperature; /*温度*/
uint8_t humidity; /*湿度*/
float Light = 0; /*光照度*/
uint8_t key = 0; /*key值*/
unsigned char rece_buf[33];
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
dht11_init(); /* DHT11初始化 */
BH1750_Init(); /* BH1750初始化 */
OLED_Init(); /* OLED初始化 */
BEEP_Init(); /* BEEP初始化 */
OLED_ColorTurn(0); /* 0正常显示,1 反色显示*/
OLED_DisplayTurn(0); /* 0正常显示 1 屏幕翻转显示*/
btim_timx_int_init(4999, 7199); /* 初始化定时器6_基本定时器*/
btim_tim7_int_init(4999, 7199); /* 初始化定时器7_基本定时器*/
key_init(); /* 按键初始化*/
extix_init(); /* 初始化中断*/
nrf24l01_init(); /* 初始化NRF24L01 */
nrf24l01_tx_mode(); /* 进入TX模式 */
rece_buf[0]=5;
rece_buf[1]= 0X55;
rece_buf[2]= 0XAA;
rece_buf[32] = 0; /* 加入结束符 */
while (1)
{
dht11_read_data(&temperature, &humidity); /* 读取温湿度值 */
printf("温度:%d %%,湿度:%d C \r\n",temperature,humidity);
if (!i2c_CheckDevice(BH1750_Addr)) /* 检测是否存在bh1750 */
{
Light = LIght_Intensity(); /* 获取光强度的值 */
printf("light:%f \r\n",Light);
}
if (alarm_Free_Time == 10)
{
if (temperature < 30 && humidity < 80 && Light< 10000)
alarm_Flag = 0; /* 温度超过30摄氏度、湿度超过80、光强度超过10000报警 */
else
alarm_Flag = 1;
}
if (alarm_Free_Time < 10)
alarm_Free_Time++;
delay_ms(1000);
rece_buf[3]=(uint8_t)temperature;
rece_buf[4]=(uint8_t)humidity;
rece_buf[5]=(uint8_t)Light;
nrf24l01_tx_packet(rece_buf);
key = key_scan(0);
}
}
dht11
#include "./BSP/DHT11/dht11.h"
#include "./SYSTEM/delay/delay.h"
/**
* @brief 复位DHT11
* @param 无
* @retval 无
*/
static void dht11_reset(void)
{
DHT11_DQ_OUT(0); /* 拉低DQ */
delay_ms(20); /* 拉低至少18ms */
DHT11_DQ_OUT(1); /* DQ=1 */
delay_us(30); /* 主机拉高10~35us */
}
/**
* @brief 等待DHT11的回应
* @param 无
* @retval 0, DHT11正常
* 1, DHT11异常/不存在
*/
uint8_t dht11_check(void)
{
uint8_t retry = 0;
uint8_t rval = 0;
while (DHT11_DQ_IN && retry < 100) /* DHT11会拉低约83us */
{
retry++;
delay_us(1);
}
if (retry >= 100)
{
rval = 1;
}
else
{
retry = 0;
while (!DHT11_DQ_IN && retry < 100) /* DHT11拉低后会再次拉高约87us */
{
retry++;
delay_us(1);
}
if (retry >= 100) rval = 1;
}
return rval;
}
/**
* @brief 从DHT11读取一个位
* @param 无
* @retval 读取到的位值: 0 / 1
*/
uint8_t dht11_read_bit(void)
{
uint8_t retry = 0;
while (DHT11_DQ_IN && retry < 100) /* 等待变为低电平 */
{
retry++;
delay_us(1);
}
retry = 0;
while (!DHT11_DQ_IN && retry < 100) /* 等待变高电平 */
{
retry++;
delay_us(1);
}
delay_us(40); /* 等待40us */
if (DHT11_DQ_IN) /* 根据引脚状态返回 bit */
{
return 1;
}
else
{
return 0;
}
}
/**
* @brief 从DHT11读取一个字节
* @param 无
* @retval 读到的数据
*/
static uint8_t dht11_read_byte(void)
{
uint8_t i, data = 0;
for (i = 0; i < 8; i++) /* 循环读取8位数据 */
{
data <<= 1; /* 高位数据先输出, 先左移一位 */
data |= dht11_read_bit(); /* 读取1bit数据 */
}
return data;
}
/**
* @brief 从DHT11读取一次数据
* @param temp: 温度值(范围:-20~60°)
* @param humi: 湿度值(范围:5%~95%)
* @retval 0, 正常.
* 1, 失败
*/
uint8_t dht11_read_data(uint8_t *temp, uint8_t *humi)
{
uint8_t buf[5];
uint8_t i;
dht11_reset();
if (dht11_check() == 0)
{
for (i = 0; i < 5; i++) /* 读取40位数据 */
{
buf[i] = dht11_read_byte();
}
if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
{
*humi = buf[0];
*temp = buf[2];
}
}
else
{
return 1;
}
return 0;
}
/**
* @brief 初始化DHT11的IO口 DQ 同时检测DHT11的存在
* @param 无
* @retval 0, 正常
* 1, 不存在/不正常
*/
uint8_t dht11_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
DHT11_DQ_GPIO_CLK_ENABLE(); /* 开启DQ引脚时钟 */
gpio_init_struct.Pin = DHT11_DQ_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 开漏输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(DHT11_DQ_GPIO_PORT, &gpio_init_struct); /* 初始化DHT11_DQ引脚 */
/* DHT11_DQ引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */
dht11_reset();
return dht11_check();
}oled
#include "./BSP/OLED/oled.h"
#include "stdlib.h"
#include "./BSP/OLED/oledfont.h"
#include "./SYSTEM/delay/delay.h"
uint8_t OLED_GRAM[144][8];
//反显函数
void OLED_ColorTurn(uint8_t i)
{
if(i==0)
{
OLED_WR_Byte(0xA6,OLED_CMD);//正常显示
}
if(i==1)
{
OLED_WR_Byte(0xA7,OLED_CMD);//反色显示
}
}
//屏幕旋转180度
void OLED_DisplayTurn(uint8_t i)
{
if(i==0)
{
OLED_WR_Byte(0xC8,OLED_CMD);//正常显示
OLED_WR_Byte(0xA1,OLED_CMD);
}
if(i==1)
{
OLED_WR_Byte(0xC0,OLED_CMD);//反转显示
OLED_WR_Byte(0xA0,OLED_CMD);
}
}
//延时
void IIC_delay(void)
{
uint8_t t=3;
while(t--);
}
//起始信号
void I2C_Start(void)
{
OLED_SDA_Set();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Clr();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//结束信号
void I2C_Stop(void)
{
OLED_SDA_Clr();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Set();
}
//等待信号响应
void I2C_WaitAck(void) //测数据信号的电平
{
OLED_SDA_Set();
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//写入一个字节
void Send_Byte(uint8_t dat)
{
uint8_t i;
for(i=0;i<8;i++)
{
if(dat&0x80)//将dat的8位从最高位依次写入
{
OLED_SDA_Set();
}
else
{
OLED_SDA_Clr();
}
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();//将时钟信号设置为低电平
dat<<=1;
}
}
//发送一个字节
//mode:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(uint8_t dat,uint8_t mode)
{
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
if(mode){Send_Byte(0x40);}
else{Send_Byte(0x00);}
I2C_WaitAck();
Send_Byte(dat);
I2C_WaitAck();
I2C_Stop();
}
//开启OLED显示
void OLED_DisPlay_On(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x14,OLED_CMD);//开启电荷泵
OLED_WR_Byte(0xAF,OLED_CMD);//点亮屏幕
}
//关闭OLED显示
void OLED_DisPlay_Off(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x10,OLED_CMD);//关闭电荷泵
OLED_WR_Byte(0xAE,OLED_CMD);//关闭屏幕
}
//更新显存到OLED
void OLED_Refresh(void)
{
uint8_t i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte(0xb0+i,OLED_CMD); //设置行起始地址
OLED_WR_Byte(0x00,OLED_CMD); //设置低列起始地址
OLED_WR_Byte(0x10,OLED_CMD); //设置高列起始地址
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
Send_Byte(0x40);
I2C_WaitAck();
for(n=0;n<128;n++)
{
Send_Byte(OLED_GRAM[n][i]);
I2C_WaitAck();
}
I2C_Stop();
}
}
//清屏函数
void OLED_Clear(void)
{
uint8_t i,n;
for(i=0;i<8;i++)
{
for(n=0;n<128;n++)
{
OLED_GRAM[n][i]=0;//清除所有数据
}
}
OLED_Refresh();//更新显示
}
//画点
//x:0~127
//y:0~63
//t:1 填充 0,清空
void OLED_DrawPoint(uint8_t x,uint8_t y,uint8_t t)
{
uint8_t i,m,n;
i=y/8;
m=y%8;
n=1<<m;
if(t){OLED_GRAM[x][i]|=n;}
else
{
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
OLED_GRAM[x][i]|=n;
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
}
}
//画线
//x1,y1:起点坐标
//x2,y2:结束坐标
void OLED_DrawLine(uint8_t x1,uint8_t y1,uint8_t x2,uint8_t y2,uint8_t mode)
{
uint16_t t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //计算坐标增量
delta_y=y2-y1;
uRow=x1;//画线起点坐标
uCol=y1;
if(delta_x>0)incx=1; //设置单步方向
else if (delta_x==0)incx=0;//垂直线
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if (delta_y==0)incy=0;//水平线
else {incy=-1;delta_y=-delta_x;}
if(delta_x>delta_y)distance=delta_x; //选取基本增量坐标轴
else distance=delta_y;
for(t=0;t<distance+1;t++)
{
OLED_DrawPoint(uRow,uCol,mode);//画点
xerr+=delta_x;
yerr+=delta_y;
if(xerr>distance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
//x,y:圆心坐标
//r:圆的半径
void OLED_DrawCircle(uint8_t x,uint8_t y,uint8_t r)
{
int a, b,num;
a = 0;
b = r;
while(2 * b * b >= r * r)
{
OLED_DrawPoint(x + a, y - b,1);
OLED_DrawPoint(x - a, y - b,1);
OLED_DrawPoint(x - a, y + b,1);
OLED_DrawPoint(x + a, y + b,1);
OLED_DrawPoint(x + b, y + a,1);
OLED_DrawPoint(x + b, y - a,1);
OLED_DrawPoint(x - b, y - a,1);
OLED_DrawPoint(x - b, y + a,1);
a++;
num = (a * a + b * b) - r*r;//计算画的点离圆心的距离
if(num > 0)
{
b--;
a--;
}
}
}
//在指定位置显示一个字符,包括部分字符
//x:0~127
//y:0~63
//size1:选择字体 6x8/6x12/8x16/12x24
//mode:0,反色显示;1,正常显示
void OLED_ShowChar(uint8_t x,uint8_t y,uint8_t chr,uint8_t size1,uint8_t mode)
{
uint8_t i,m,temp,size2,chr1;
uint8_t x0=x,y0=y;
if(size1==8)size2=6;
else size2=(size1/8+((size1%8)?1:0))*(size1/2); //得到字体一个字符对应点阵集所占的字节数
chr1=chr-' '; //计算偏移后的值
for(i=0;i<size2;i++)
{
if(size1==8)
{temp=asc2_0806[chr1][i];} //调用0806字体
else if(size1==12)
{temp=asc2_1206[chr1][i];} //调用1206字体
else if(size1==16)
{temp=asc2_1608[chr1][i];} //调用1608字体
else if(size1==24)
{temp=asc2_2412[chr1][i];} //调用2412字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((size1!=8)&&((x-x0)==size1/2))
{x=x0;y0=y0+8;}
y=y0;
}
}
//显示字符串
//x,y:起点坐标
//size1:字体大小
//*chr:字符串起始地址
//mode:0,反色显示;1,正常显示
void OLED_ShowString(uint8_t x,uint8_t y,uint8_t *chr,uint8_t size1,uint8_t mode)
{
while((*chr>=' ')&&(*chr<='~'))//判断是不是非法字符!
{
OLED_ShowChar(x,y,*chr,size1,mode);
if(size1==8)x+=6;
else x+=size1/2;
chr++;
}
}
//m^n
uint32_t OLED_Pow(uint8_t m,uint8_t n)
{
uint32_t result=1;
while(n--)
{
result*=m;
}
return result;
}
//显示数字
//x,y :起点坐标
//num :要显示的数字
//len :数字的位数
//size:字体大小
//mode:0,反色显示;1,正常显示
void OLED_ShowNum(uint8_t x,uint8_t y,uint32_t num,uint8_t len,uint8_t size1,uint8_t mode)
{
uint8_t t,temp,m=0;
if(size1==8)m=2;
for(t=0;t<len;t++)
{
temp=(num/OLED_Pow(10,len-t-1))%10;
if(temp==0)
{
OLED_ShowChar(x+(size1/2+m)*t,y,'0',size1,mode);
}
else
{
OLED_ShowChar(x+(size1/2+m)*t,y,temp+'0',size1,mode);
}
}
}
//显示汉字
//x,y:起点坐标
//num:汉字对应的序号
//mode:0,反色显示;1,正常显示
void OLED_ShowChinese(uint8_t x,uint8_t y,uint8_t num,uint8_t size1,uint8_t mode)
{
uint8_t m,temp;
uint8_t x0=x,y0=y;
uint16_t i,size3=(size1/8+((size1%8)?1:0))*size1; //得到字体一个字符对应点阵集所占的字节数
for(i=0;i<size3;i++)
{
if(size1==16)
{temp=Hzk1[num][i];}//调用16*16字体
else if(size1==24)
{temp=Hzk2[num][i];}//调用24*24字体
else if(size1==32)
{temp=Hzk3[num][i];}//调用32*32字体
else if(size1==64)
{temp=Hzk4[num][i];}//调用64*64字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==size1)
{x=x0;y0=y0+8;}
y=y0;
}
}
//num 显示汉字的个数
//space 每一遍显示的间隔
//mode:0,反色显示;1,正常显示
void OLED_ScrollDisplay(uint8_t num,uint8_t space,uint8_t mode)
{
uint8_t i,n,t=0,m=0,r;
while(1)
{
if(m==0)
{
OLED_ShowChinese(128,24,t,16,mode); //写入一个汉字保存在OLED_GRAM[][]数组中
t++;
}
if(t==num)
{
for(r=0;r<16*space;r++) //显示间隔
{
for(i=1;i<144;i++)
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
t=0;
}
m++;
if(m==16){m=0;}
for(i=1;i<144;i++) //实现左移
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
}
//x,y:起点坐标
//sizex,sizey,图片长宽
//BMP[]:要写入的图片数组
//mode:0,反色显示;1,正常显示
void OLED_ShowPicture(uint8_t x,uint8_t y,uint8_t sizex,uint8_t sizey,uint8_t BMP[],uint8_t mode)
{
uint16_t j=0;
uint8_t i,n,temp,m;
uint8_t x0=x,y0=y;
sizey=sizey/8+((sizey%8)?1:0);
for(n=0;n<sizey;n++)
{
for(i=0;i<sizex;i++)
{
temp=BMP[j];
j++;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==sizex)
{
x=x0;
y0=y0+8;
}
y=y0;
}
}
}
//OLED的初始化
void OLED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
__HAL_RCC_GPIOG_CLK_ENABLE(); /* 使能GPIOF时钟 */
__HAL_RCC_GPIOD_CLK_ENABLE();
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG|RCC_APB2Periph_GPIOD, ENABLE); //使能A端口时钟
GPIO_InitStructure.Pin = GPIO_PIN_12; //SCL
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_12, GPIO_PIN_RESET);
GPIO_InitStructure.Pin = GPIO_PIN_5; //DIN
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_RESET);
GPIO_InitStructure.Pin = GPIO_PIN_4; //RES
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_RESET);
OLED_RES_Clr();
delay_ms(200);
OLED_RES_Set();
OLED_WR_Byte(0xAE,OLED_CMD);//--turn off oled panel
OLED_WR_Byte(0x00,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address Set Mapping RAM Display Start Line (0x00~0x3F)
OLED_WR_Byte(0x81,OLED_CMD);//--set contrast control register
OLED_WR_Byte(0xCF,OLED_CMD);// Set SEG Output Current Brightness
OLED_WR_Byte(0xA1,OLED_CMD);//--Set SEG/Column Mapping 0xa0左右反置 0xa1正常
OLED_WR_Byte(0xC8,OLED_CMD);//Set COM/Row Scan Direction 0xc0上下反置 0xc8正常
OLED_WR_Byte(0xA6,OLED_CMD);//--set normal display
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3f,OLED_CMD);//--1/64 duty
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset Shift Mapping RAM Counter (0x00~0x3F)
OLED_WR_Byte(0x00,OLED_CMD);//-not offset
OLED_WR_Byte(0xd5,OLED_CMD);//--set display clock divide ratio/oscillator frequency
OLED_WR_Byte(0x80,OLED_CMD);//--set divide ratio, Set Clock as 100 Frames/Sec
OLED_WR_Byte(0xD9,OLED_CMD);//--set pre-charge period
OLED_WR_Byte(0xF1,OLED_CMD);//Set Pre-Charge as 15 Clocks & Discharge as 1 Clock
OLED_WR_Byte(0xDA,OLED_CMD);//--set com pins hardware configuration
OLED_WR_Byte(0x12,OLED_CMD);
OLED_WR_Byte(0xDB,OLED_CMD);//--set vcomh
OLED_WR_Byte(0x40,OLED_CMD);//Set VCOM Deselect Level
OLED_WR_Byte(0x20,OLED_CMD);//-Set Page Addressing Mode (0x00/0x01/0x02)
OLED_WR_Byte(0x02,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//--set Charge Pump enable/disable
OLED_WR_Byte(0x14,OLED_CMD);//--set(0x10) disable
OLED_WR_Byte(0xA4,OLED_CMD);// Disable Entire Display On (0xa4/0xa5)
OLED_WR_Byte(0xA6,OLED_CMD);// Disable Inverse Display On (0xa6/a7)
OLED_Clear();
OLED_WR_Byte(0xAF,OLED_CMD);
}
bh1750
#include "./BSP/OLED/oled.h"
#include "stdlib.h"
#include "./BSP/OLED/oledfont.h"
#include "./SYSTEM/delay/delay.h"
uint8_t OLED_GRAM[144][8];
//反显函数
void OLED_ColorTurn(uint8_t i)
{
if(i==0)
{
OLED_WR_Byte(0xA6,OLED_CMD);//正常显示
}
if(i==1)
{
OLED_WR_Byte(0xA7,OLED_CMD);//反色显示
}
}
//屏幕旋转180度
void OLED_DisplayTurn(uint8_t i)
{
if(i==0)
{
OLED_WR_Byte(0xC8,OLED_CMD);//正常显示
OLED_WR_Byte(0xA1,OLED_CMD);
}
if(i==1)
{
OLED_WR_Byte(0xC0,OLED_CMD);//反转显示
OLED_WR_Byte(0xA0,OLED_CMD);
}
}
//延时
void IIC_delay(void)
{
uint8_t t=3;
while(t--);
}
//起始信号
void I2C_Start(void)
{
OLED_SDA_Set();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Clr();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//结束信号
void I2C_Stop(void)
{
OLED_SDA_Clr();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Set();
}
//等待信号响应
void I2C_WaitAck(void) //测数据信号的电平
{
OLED_SDA_Set();
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//写入一个字节
void Send_Byte(uint8_t dat)
{
uint8_t i;
for(i=0;i<8;i++)
{
if(dat&0x80)//将dat的8位从最高位依次写入
{
OLED_SDA_Set();
}
else
{
OLED_SDA_Clr();
}
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();//将时钟信号设置为低电平
dat<<=1;
}
}
//发送一个字节
//mode:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(uint8_t dat,uint8_t mode)
{
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
if(mode){Send_Byte(0x40);}
else{Send_Byte(0x00);}
I2C_WaitAck();
Send_Byte(dat);
I2C_WaitAck();
I2C_Stop();
}
//开启OLED显示
void OLED_DisPlay_On(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x14,OLED_CMD);//开启电荷泵
OLED_WR_Byte(0xAF,OLED_CMD);//点亮屏幕
}
//关闭OLED显示
void OLED_DisPlay_Off(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x10,OLED_CMD);//关闭电荷泵
OLED_WR_Byte(0xAE,OLED_CMD);//关闭屏幕
}
//更新显存到OLED
void OLED_Refresh(void)
{
uint8_t i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte(0xb0+i,OLED_CMD); //设置行起始地址
OLED_WR_Byte(0x00,OLED_CMD); //设置低列起始地址
OLED_WR_Byte(0x10,OLED_CMD); //设置高列起始地址
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
Send_Byte(0x40);
I2C_WaitAck();
for(n=0;n<128;n++)
{
Send_Byte(OLED_GRAM[n][i]);
I2C_WaitAck();
}
I2C_Stop();
}
}
//清屏函数
void OLED_Clear(void)
{
uint8_t i,n;
for(i=0;i<8;i++)
{
for(n=0;n<128;n++)
{
OLED_GRAM[n][i]=0;//清除所有数据
}
}
OLED_Refresh();//更新显示
}
//画点
//x:0~127
//y:0~63
//t:1 填充 0,清空
void OLED_DrawPoint(uint8_t x,uint8_t y,uint8_t t)
{
uint8_t i,m,n;
i=y/8;
m=y%8;
n=1<<m;
if(t){OLED_GRAM[x][i]|=n;}
else
{
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
OLED_GRAM[x][i]|=n;
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
}
}
//画线
//x1,y1:起点坐标
//x2,y2:结束坐标
void OLED_DrawLine(uint8_t x1,uint8_t y1,uint8_t x2,uint8_t y2,uint8_t mode)
{
uint16_t t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //计算坐标增量
delta_y=y2-y1;
uRow=x1;//画线起点坐标
uCol=y1;
if(delta_x>0)incx=1; //设置单步方向
else if (delta_x==0)incx=0;//垂直线
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if (delta_y==0)incy=0;//水平线
else {incy=-1;delta_y=-delta_x;}
if(delta_x>delta_y)distance=delta_x; //选取基本增量坐标轴
else distance=delta_y;
for(t=0;t<distance+1;t++)
{
OLED_DrawPoint(uRow,uCol,mode);//画点
xerr+=delta_x;
yerr+=delta_y;
if(xerr>distance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
//x,y:圆心坐标
//r:圆的半径
void OLED_DrawCircle(uint8_t x,uint8_t y,uint8_t r)
{
int a, b,num;
a = 0;
b = r;
while(2 * b * b >= r * r)
{
OLED_DrawPoint(x + a, y - b,1);
OLED_DrawPoint(x - a, y - b,1);
OLED_DrawPoint(x - a, y + b,1);
OLED_DrawPoint(x + a, y + b,1);
OLED_DrawPoint(x + b, y + a,1);
OLED_DrawPoint(x + b, y - a,1);
OLED_DrawPoint(x - b, y - a,1);
OLED_DrawPoint(x - b, y + a,1);
a++;
num = (a * a + b * b) - r*r;//计算画的点离圆心的距离
if(num > 0)
{
b--;
a--;
}
}
}
//在指定位置显示一个字符,包括部分字符
//x:0~127
//y:0~63
//size1:选择字体 6x8/6x12/8x16/12x24
//mode:0,反色显示;1,正常显示
void OLED_ShowChar(uint8_t x,uint8_t y,uint8_t chr,uint8_t size1,uint8_t mode)
{
uint8_t i,m,temp,size2,chr1;
uint8_t x0=x,y0=y;
if(size1==8)size2=6;
else size2=(size1/8+((size1%8)?1:0))*(size1/2); //得到字体一个字符对应点阵集所占的字节数
chr1=chr-' '; //计算偏移后的值
for(i=0;i<size2;i++)
{
if(size1==8)
{temp=asc2_0806[chr1][i];} //调用0806字体
else if(size1==12)
{temp=asc2_1206[chr1][i];} //调用1206字体
else if(size1==16)
{temp=asc2_1608[chr1][i];} //调用1608字体
else if(size1==24)
{temp=asc2_2412[chr1][i];} //调用2412字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((size1!=8)&&((x-x0)==size1/2))
{x=x0;y0=y0+8;}
y=y0;
}
}
//显示字符串
//x,y:起点坐标
//size1:字体大小
//*chr:字符串起始地址
//mode:0,反色显示;1,正常显示
void OLED_ShowString(uint8_t x,uint8_t y,uint8_t *chr,uint8_t size1,uint8_t mode)
{
while((*chr>=' ')&&(*chr<='~'))//判断是不是非法字符!
{
OLED_ShowChar(x,y,*chr,size1,mode);
if(size1==8)x+=6;
else x+=size1/2;
chr++;
}
}
//m^n
uint32_t OLED_Pow(uint8_t m,uint8_t n)
{
uint32_t result=1;
while(n--)
{
result*=m;
}
return result;
}
//显示数字
//x,y :起点坐标
//num :要显示的数字
//len :数字的位数
//size:字体大小
//mode:0,反色显示;1,正常显示
void OLED_ShowNum(uint8_t x,uint8_t y,uint32_t num,uint8_t len,uint8_t size1,uint8_t mode)
{
uint8_t t,temp,m=0;
if(size1==8)m=2;
for(t=0;t<len;t++)
{
temp=(num/OLED_Pow(10,len-t-1))%10;
if(temp==0)
{
OLED_ShowChar(x+(size1/2+m)*t,y,'0',size1,mode);
}
else
{
OLED_ShowChar(x+(size1/2+m)*t,y,temp+'0',size1,mode);
}
}
}
//显示汉字
//x,y:起点坐标
//num:汉字对应的序号
//mode:0,反色显示;1,正常显示
void OLED_ShowChinese(uint8_t x,uint8_t y,uint8_t num,uint8_t size1,uint8_t mode)
{
uint8_t m,temp;
uint8_t x0=x,y0=y;
uint16_t i,size3=(size1/8+((size1%8)?1:0))*size1; //得到字体一个字符对应点阵集所占的字节数
for(i=0;i<size3;i++)
{
if(size1==16)
{temp=Hzk1[num][i];}//调用16*16字体
else if(size1==24)
{temp=Hzk2[num][i];}//调用24*24字体
else if(size1==32)
{temp=Hzk3[num][i];}//调用32*32字体
else if(size1==64)
{temp=Hzk4[num][i];}//调用64*64字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==size1)
{x=x0;y0=y0+8;}
y=y0;
}
}
//num 显示汉字的个数
//space 每一遍显示的间隔
//mode:0,反色显示;1,正常显示
void OLED_ScrollDisplay(uint8_t num,uint8_t space,uint8_t mode)
{
uint8_t i,n,t=0,m=0,r;
while(1)
{
if(m==0)
{
OLED_ShowChinese(128,24,t,16,mode); //写入一个汉字保存在OLED_GRAM[][]数组中
t++;
}
if(t==num)
{
for(r=0;r<16*space;r++) //显示间隔
{
for(i=1;i<144;i++)
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
t=0;
}
m++;
if(m==16){m=0;}
for(i=1;i<144;i++) //实现左移
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
}
//x,y:起点坐标
//sizex,sizey,图片长宽
//BMP[]:要写入的图片数组
//mode:0,反色显示;1,正常显示
void OLED_ShowPicture(uint8_t x,uint8_t y,uint8_t sizex,uint8_t sizey,uint8_t BMP[],uint8_t mode)
{
uint16_t j=0;
uint8_t i,n,temp,m;
uint8_t x0=x,y0=y;
sizey=sizey/8+((sizey%8)?1:0);
for(n=0;n<sizey;n++)
{
for(i=0;i<sizex;i++)
{
temp=BMP[j];
j++;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==sizex)
{
x=x0;
y0=y0+8;
}
y=y0;
}
}
}
//OLED的初始化
void OLED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
__HAL_RCC_GPIOG_CLK_ENABLE(); /* 使能GPIOF时钟 */
__HAL_RCC_GPIOD_CLK_ENABLE();
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG|RCC_APB2Periph_GPIOD, ENABLE); //使能A端口时钟
GPIO_InitStructure.Pin = GPIO_PIN_12; //SCL
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_12, GPIO_PIN_RESET);
GPIO_InitStructure.Pin = GPIO_PIN_5; //DIN
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_RESET);
GPIO_InitStructure.Pin = GPIO_PIN_4; //RES
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM;//速度50MHz
HAL_GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化GPIOF
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_RESET);
OLED_RES_Clr();
delay_ms(200);
OLED_RES_Set();
OLED_WR_Byte(0xAE,OLED_CMD);//--turn off oled panel
OLED_WR_Byte(0x00,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address Set Mapping RAM Display Start Line (0x00~0x3F)
OLED_WR_Byte(0x81,OLED_CMD);//--set contrast control register
OLED_WR_Byte(0xCF,OLED_CMD);// Set SEG Output Current Brightness
OLED_WR_Byte(0xA1,OLED_CMD);//--Set SEG/Column Mapping 0xa0左右反置 0xa1正常
OLED_WR_Byte(0xC8,OLED_CMD);//Set COM/Row Scan Direction 0xc0上下反置 0xc8正常
OLED_WR_Byte(0xA6,OLED_CMD);//--set normal display
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3f,OLED_CMD);//--1/64 duty
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset Shift Mapping RAM Counter (0x00~0x3F)
OLED_WR_Byte(0x00,OLED_CMD);//-not offset
OLED_WR_Byte(0xd5,OLED_CMD);//--set display clock divide ratio/oscillator frequency
OLED_WR_Byte(0x80,OLED_CMD);//--set divide ratio, Set Clock as 100 Frames/Sec
OLED_WR_Byte(0xD9,OLED_CMD);//--set pre-charge period
OLED_WR_Byte(0xF1,OLED_CMD);//Set Pre-Charge as 15 Clocks & Discharge as 1 Clock
OLED_WR_Byte(0xDA,OLED_CMD);//--set com pins hardware configuration
OLED_WR_Byte(0x12,OLED_CMD);
OLED_WR_Byte(0xDB,OLED_CMD);//--set vcomh
OLED_WR_Byte(0x40,OLED_CMD);//Set VCOM Deselect Level
OLED_WR_Byte(0x20,OLED_CMD);//-Set Page Addressing Mode (0x00/0x01/0x02)
OLED_WR_Byte(0x02,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//--set Charge Pump enable/disable
OLED_WR_Byte(0x14,OLED_CMD);//--set(0x10) disable
OLED_WR_Byte(0xA4,OLED_CMD);// Disable Entire Display On (0xa4/0xa5)
OLED_WR_Byte(0xA6,OLED_CMD);// Disable Inverse Display On (0xa6/a7)
OLED_Clear();
OLED_WR_Byte(0xAF,OLED_CMD);
}
NRF24L01
/**
****************************************************************************************************
* @file nrf24l01.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2020-04-26
* @brief NRF24L01 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 STM32F103开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20200426
* 第一次发布
*
****************************************************************************************************
*/
#include "./BSP/SPI/spi.h"
#include "./BSP/NRF24L01/nrf24l01.h"
#include "./SYSTEM/delay/delay.h"
extern SPI_HandleTypeDef g_spi2_handler; /* SPI2句柄 */
const uint8_t TX_ADDRESS[TX_ADR_WIDTH] = {0xFF,0xFF,0xFF,0xFF,0xFF}; /* 发送地址 */
const uint8_t RX_ADDRESS[RX_ADR_WIDTH] = {0xFF,0xFF,0xFF,0xFF,0xFF}; /* 发送地址 */
/**
* @brief 针对NRF24L01修改SPI2驱动
* @param 无
* @retval 无
*/
void nrf24l01_spi_init(void)
{
__HAL_SPI_DISABLE(&g_spi2_handler); /* 先关闭SPI2 */
g_spi2_handler.Init.CLKPolarity = SPI_POLARITY_LOW; /* 串行同步时钟的空闲状态为低电平 */
g_spi2_handler.Init.CLKPhase = SPI_PHASE_1EDGE; /* 串行同步时钟的第1个跳变沿(上升或下降)数据被采样 */
HAL_SPI_Init(&g_spi2_handler);
__HAL_SPI_ENABLE(&g_spi2_handler); /* 使能SPI2 */
}
/**
* @brief 初始化24L01的IO口
* @note 将SPI2模式改成SCK空闲低电平,及SPI 模式0
* @param 无
* @retval 无
*/
void nrf24l01_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
NRF24L01_CE_GPIO_CLK_ENABLE(); /* CE脚时钟使能 */
NRF24L01_CSN_GPIO_CLK_ENABLE(); /* CSN脚时钟使能 */
NRF24L01_IRQ_GPIO_CLK_ENABLE(); /* IRQ脚时钟使能 */
gpio_init_struct.Pin = NRF24L01_CE_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(NRF24L01_CE_GPIO_PORT, &gpio_init_struct); /* 初始化CE引脚 */
gpio_init_struct.Pin = NRF24L01_CSN_GPIO_PIN;
HAL_GPIO_Init(NRF24L01_CSN_GPIO_PORT, &gpio_init_struct);/* 初始化CSN引脚 */
gpio_init_struct.Pin = NRF24L01_IRQ_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(NRF24L01_IRQ_GPIO_PORT, &gpio_init_struct);/* 初始化CE引脚 */
spi2_init(); /* 初始化SPI2 */
nrf24l01_spi_init(); /* 针对NRF的特点修改SPI的设置 */
NRF24L01_CE(0); /* 使能24L01 */
NRF24L01_CSN(1); /* SPI片选取消 */
}
/**
* @brief 检测24L01是否存在
* @param 无
* @retval 0, 成功; 1, 失败;
*/
uint8_t nrf24l01_check(void)
{
uint8_t buf[5] = {0XA5, 0XA5, 0XA5, 0XA5, 0XA5};
uint8_t i;
spi2_set_speed(SPI_SPEED_32); /* spi速度为7.5Mhz(24L01的最大SPI时钟为10Mhz) */
nrf24l01_write_buf(NRF_WRITE_REG + TX_ADDR, buf, 5); /* 写入5个字节的地址. */
nrf24l01_read_buf(TX_ADDR, buf, 5); /* 读出写入的地址 */
for (i = 0; i < 5; i++)
{
if (buf[i] != 0XA5) break;
}
if (i != 5) return 1; /* 检测24L01错误 */
return 0; /* 检测到24L01 */
}
/**
* @brief NRF24L01写寄存器
* @param reg : 寄存器地址
* @param value : 写入寄存器的值
* @retval 状态寄存器值
*/
static uint8_t nrf24l01_write_reg(uint8_t reg, uint8_t value)
{
uint8_t status;
NRF24L01_CSN(0); /* 使能SPI传输 */
status = spi2_read_write_byte(reg); /* 发送寄存器号 */
spi2_read_write_byte(value); /* 写入寄存器的值 */
NRF24L01_CSN(1); /* 禁止SPI传输 */
return status; /* 返回状态值 */
}
/**
* @brief NRF24L01读寄存器
* @param reg : 寄存器地址
* @retval 读取到的寄存器值;
*/
static uint8_t nrf24l01_read_reg(uint8_t reg)
{
uint8_t reg_val;
NRF24L01_CSN(0); /* 使能SPI传输 */
spi2_read_write_byte(reg); /* 发送寄存器号 */
reg_val = spi2_read_write_byte(0XFF); /* 读取寄存器内容 */
NRF24L01_CSN(1); /* 禁止SPI传输 */
return reg_val; /* 返回状态值 */
}
/**
* @brief 在指定位置读出指定长度的数据
* @param reg : 寄存器地址
* @param pbuf : 数据指针
* @param len : 数据长度
* @retval 状态寄存器值
*/
static uint8_t nrf24l01_read_buf(uint8_t reg, uint8_t *pbuf, uint8_t len)
{
uint8_t status, i;
NRF24L01_CSN(0); /* 使能SPI传输 */
status = spi2_read_write_byte(reg); /* 发送寄存器值(位置),并读取状态值 */
for (i = 0; i < len; i++)
{
pbuf[i] = spi2_read_write_byte(0XFF); /* 读出数据 */
}
NRF24L01_CSN(1); /* 关闭SPI传输 */
return status; /* 返回读到的状态值 */
}
/**
* @brief 在指定位置写指定长度的数据
* @param reg : 寄存器地址
* @param pbuf : 数据指针
* @param len : 数据长度
* @retval 状态寄存器值
*/
static uint8_t nrf24l01_write_buf(uint8_t reg, uint8_t *pbuf, uint8_t len)
{
uint8_t status, i;
NRF24L01_CSN(0); /* 使能SPI传输 */
status = spi2_read_write_byte(reg);/* 发送寄存器值(位置),并读取状态值 */
for (i = 0; i < len; i++)
{
spi2_read_write_byte(*pbuf++); /* 写入数据 */
}
NRF24L01_CSN(1); /* 关闭SPI传输 */
return status; /* 返回读到的状态值 */
}
/**
* @brief 启动NRF24L01发送一次数据(数据长度 = TX_PLOAD_WIDTH)
* @param ptxbuf : 待发送数据首地址
* @retval 发送完成状态
* @arg 0 : 发送成功
* @arg 1 : 达到最大发送次数,失败
* @arg 0XFF : 其他错误
*/
uint8_t nrf24l01_tx_packet(uint8_t *ptxbuf)
{
uint8_t sta;
uint8_t rval = 0XFF;
NRF24L01_CE(0);
nrf24l01_write_buf(WR_TX_PLOAD, ptxbuf, TX_PLOAD_WIDTH); /* 写数据到TX BUF TX_PLOAD_WIDTH个字节 */
NRF24L01_CE(1); /* 启动发送 */
while (NRF24L01_IRQ != 0); /* 等待发送完成 */
sta = nrf24l01_read_reg(STATUS); /* 读取状态寄存器的值 */
nrf24l01_write_reg(NRF_WRITE_REG + STATUS, sta); /* 清除TX_DS或MAX_RT中断标志 */
if (sta & MAX_TX) /* 达到最大重发次数 */
{
nrf24l01_write_reg(FLUSH_TX, 0xff); /* 清除TX FIFO寄存器 */
rval = 1;
}
if (sta & TX_OK)/* 发送完成 */
{
rval = 0; /* 标记发送成功 */
}
return rval; /* 返回结果 */
}
/**
* @brief 启动NRF24L01接收一次数据(数据长度 = RX_PLOAD_WIDTH)
* @param prxbuf : 接收数据缓冲区首地址
* @retval 接收完成状态
* @arg 0 : 接收成功
* @arg 1 : 失败
*/
uint8_t nrf24l01_rx_packet(uint8_t *prxbuf)
{
uint8_t sta;
uint8_t rval = 1;
sta = nrf24l01_read_reg(STATUS); /* 读取状态寄存器的值 */
nrf24l01_write_reg(NRF_WRITE_REG + STATUS, sta); /* 清除RX_DS中断标志 */
if (sta & RX_OK) /* 接收到数据 */
{
nrf24l01_read_buf(RD_RX_PLOAD, prxbuf, RX_PLOAD_WIDTH); /* 读取数据 */
nrf24l01_write_reg(FLUSH_RX, 0xff); /* 清除RX FIFO寄存器 */
rval = 0; /* 标记接收完成 */
}
return rval; /* 返回结果 */
}
/**
* @brief NRF24L01进入接收模式
* @note 设置RX地址,写RX数据宽度,选择RF频道,波特率和LNA HCURR
* 当CE变高后,即进入RX模式,并可以接收数据了
* @param 无
* @retval 无
*/
void nrf24l01_rx_mode(void)
{
NRF24L01_CE(0);
nrf24l01_write_buf(NRF_WRITE_REG + RX_ADDR_P0, (uint8_t *)RX_ADDRESS, RX_ADR_WIDTH); /* 写RX节点地址 */
nrf24l01_write_reg(NRF_WRITE_REG + EN_AA, 0x01); /* 使能通道0的自动应答 */
nrf24l01_write_reg(NRF_WRITE_REG + EN_RXADDR, 0x01); /* 使能通道0的接收地址 */
nrf24l01_write_reg(NRF_WRITE_REG + RF_CH, 0); /* 设置RF通信频率 */
nrf24l01_write_reg(NRF_WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); /* 选择通道0的有效数据宽度 */
nrf24l01_write_reg(NRF_WRITE_REG + RF_SETUP, 0x0f); /* 设置TX发射参数,0db增益,2Mbps,低噪声增益开启 */
nrf24l01_write_reg(NRF_WRITE_REG + CONFIG, 0x0f); /* 配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式 */
NRF24L01_CE(1); /* CE为高,进入接收模式 */
}
/**
* @brief NRF24L01进入发送模式
* @note 设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和
* LNA HCURR,PWR_UP,CRC使能
* 当CE变高后,即进入TX模式,并可以发送数据了, CE为高大于10us,则启动发送.
* @param 无
* @retval 无
*/
void nrf24l01_tx_mode(void)
{
NRF24L01_CE(0);
nrf24l01_write_buf(NRF_WRITE_REG + TX_ADDR, (uint8_t *)TX_ADDRESS, TX_ADR_WIDTH); /* 写TX节点地址 */
nrf24l01_write_buf(NRF_WRITE_REG + RX_ADDR_P0, (uint8_t *)RX_ADDRESS, RX_ADR_WIDTH); /* 设置RX节点地址,主要为了使能ACK */
nrf24l01_write_reg(NRF_WRITE_REG + EN_AA, 0x01); /* 使能通道0的自动应答 */
nrf24l01_write_reg(NRF_WRITE_REG + EN_RXADDR, 0x01); /* 使能通道0的接收地址 */
nrf24l01_write_reg(NRF_WRITE_REG + SETUP_RETR, 0x1a); /* 设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次 */
nrf24l01_write_reg(NRF_WRITE_REG + RF_CH, 0); /* 设置RF通道为40 */
nrf24l01_write_reg(NRF_WRITE_REG + RF_SETUP, 0x0f); /* 设置TX发射参数,0db增益,2Mbps,低噪声增益开启 */
nrf24l01_write_reg(NRF_WRITE_REG + CONFIG, 0x0e); /* 配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断 */
NRF24L01_CE(1); /* CE为高,10us后启动发送 */
}
接收部分文章来源:https://www.toymoban.com/news/detail-778049.html
main
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "onenet.h"
#include "esp8266.h"
#include "nrf24l01.h"
//C库
#include <string.h>
#include <stdio.h>
void SystemClock_Config(void);
extern uint8_t Uart2_RxData; //接收中断缓冲
unsigned char rece_buf[33];
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
nrf24l01_init(); /* 初始化NRF24L01 */
HAL_UART_Receive_IT(&huart2,(uint8_t *)&Uart2_RxData, 1);//开启串口中断
/*设置NRF2401接收模式*/
nrf24l01_rx_mode();
/* esp8266连接wifi+连接Onenet */
HAL_Delay(2000);
ESP8266_Init(); //初始化ESP8266,连接wifi
HAL_Delay(2000);
while(OneNet_DevLink()) //连接OneNET
HAL_Delay(2000);
printf("是否存在nrf2401");
while(nrf24l01_check())
{
printf("不存在nrf2401");
}
while (1)
{
if(nrf24l01_rx_packet(rece_buf)==0)
{
rece_buf[32]=0;
printf("%s\r\n",rece_buf);
}
OneNet_SendData(); //发送数据
ESP8266_Clear(); //清空数据缓存区
HAL_Delay(1000); //3s发送一次
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
到了这里,关于STM32+NRF2401+ESP8266采集温度数据发送到oneNET平台的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!