前言
本文主要介绍的是如何通过STM32核心板 控制 双轴XY摇杆传感器模块
以及将传感信息打印到串口调试助手
提示:以下是本篇文章正文内容,下面案例可供参考
一、双轴XY摇杆传感器模块介绍
 外形如图所示,共五个引脚 分别是VCC GND
外形如图所示,共五个引脚 分别是VCC GND
X轴传感模拟量输出 以及Y轴传感模拟量输出
以及一个SW按键数字量输出
摇杆的工作原理可以理解为两个方向的电位器,和51的ADC采集时用的电位器差不多,都是通过滑动来改变输出模拟量
SW引脚是用于Z轴放下摁下时,会发生电平改变,为数字量
模块功能:可作为遥控车 无人机 船模 遥控摄像头等的控制源
二、如何使用该模块
1.进行ADC转换
摇杆模块的两个输出量都是模拟量,而STM32是无法直接识别模拟量的
所以要进行ADC转换,转换为数字量再进行操作
2.传输转换完成的数据(DMA)
当ADC转换完成后,数据会存储在相应的寄存器中,我们需要将它读取出来
本文采用DMA传输方式 可以减轻CPU的压力
3.串口打印
读取出的数据通过USART串口 打印到电脑 再根据采集的数据就可以其他功能开发,比如 数据满足某个区间 我就让LED亮灭 或者点击转动 或者说是某个方向的舵机进行转动
三、实现步骤
1.ADC初始化与配置参数
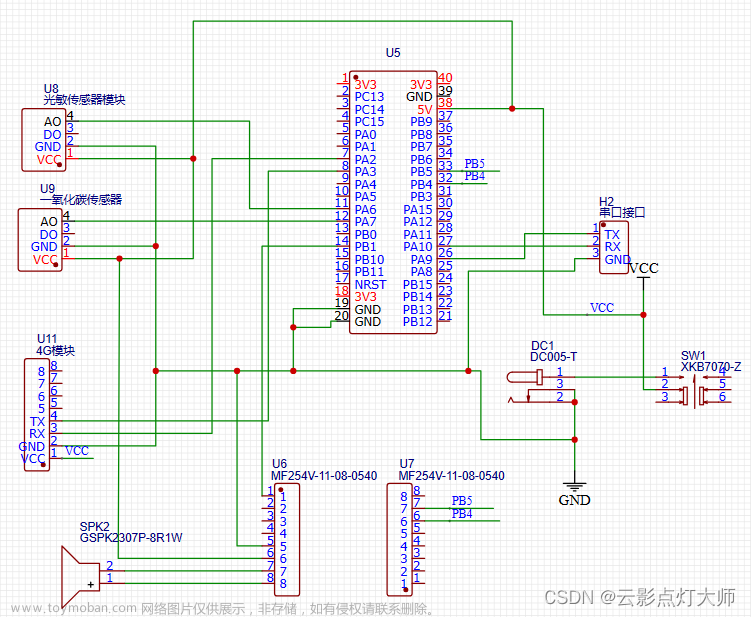
首先很明确我们要使用ADC转换,但是我们在选择引脚的时候,要注意,有些文章中有提到过,尽量别选择有复用功能的IO口,以免产生数据混乱,所以我们选择IO的时候要根据自己的原理图来选择合适的IO
核心板原理图如下: 由图可知,已经标注了我们可以通过PB0和PB1进行数据采集,那就可以直接将传感器的模拟量输出引脚对应连接,引脚需要配置为模拟输入(AIN)
由图可知,已经标注了我们可以通过PB0和PB1进行数据采集,那就可以直接将传感器的模拟量输出引脚对应连接,引脚需要配置为模拟输入(AIN)
通道号也已标注 为ADC1的通道8和9。(如果自己的图没有标志可以去查数据手册)
找到引脚与所用ADC通道后,即可开始进行初始化:
void ADC_DMA_Config(void)
{
GPIO_InitTypeDef GPIO_lnitstructure;
ADC_InitTypeDef ADC_lnitstructure;
ADC1_RCC_APBxCmd(RCC_APB2Periph_ADC1,ENABLE);//开时钟
ADC1_GPIO_RCC_APBxCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_lnitstructure.GPIO_Pin=ADC_Pin_X;
GPIO_lnitstructure.GPIO_Mode=GPIO_Mode_AIN; //设置为模拟输入
GPIO_Init(ADC1_GPIO_Base, &GPIO_lnitstructure);
GPIO_lnitstructure.GPIO_Pin=ADC_Pin_Y;
GPIO_lnitstructure.GPIO_Mode=GPIO_Mode_AIN; //设置为模拟输入
GPIO_Init(ADC1_GPIO_Base, &GPIO_lnitstructure);
以上配置好了要用的IO引脚为模拟输入,接下来进行ADC的初始化
/*ADC工作参数配置*/
//持续转换
ADC_lnitstructure.ADC_ContinuousConvMode= ENABLE;
//数据对齐方向
ADC_lnitstructure.ADC_DataAlign= ADC_DataAlign_Right;
//外部启动源
ADC_lnitstructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
//工作模式
ADC_lnitstructure.ADC_Mode= ADC_Mode_Independent;
//通道开启数量
ADC_lnitstructure.ADC_NbrOfChannel=NumChannel;
//扫描模式
ADC_lnitstructure.ADC_ScanConvMode= ENABLE;
ADC_Init(ADCx, &ADC_lnitstructure);
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
// 配置 ADC 时钟N狿 CLK2 的 8 分频,即 9MHz
//配置通道转换顺序 以及时间 参数分别代表 ADCx 通道号 顺序 时间
ADC_RegularChannelConfig(ADCx, ADC_Channel_8, 1, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADCx, ADC_Channel_9, 2, ADC_SampleTime_55Cycles5);
//使能DMA请求
ADC_DMACmd(ADCx, ENABLE);
//使能ADC转换 开启转换
ADC_Cmd(ADCx, ENABLE);
ADC在初始化基本参数后,还要通过调用规则通道函数(RegularChannelConfig)来进行通道转换顺序,转换时间的配置,以及使能DMA请求。
2.实现DMA传输
定义一个数组变量ADC_ConvertedValue来存放转换后的数据
配置DMA将数据从ADC_DR寄存器中取出 传输到定义的变量中
//储存器地址
DMA_InitStruct.DMA_PeripheralBaseAddr= (uint32_t)(&( ADCx->DR ));//取地址 把ADC的数据寄存器作为源 发送给
//外设地址
DMA_InitStruct.DMA_MemoryBaseAddr= (uint32_t)ADC_ConvertedValue;//传输给变量 uin32表示取地址
//数据大小
DMA_InitStruct.DMA_BufferSize=NumChannel;
//传输方向 储存器到 外设 DMA_DIR_PeripheralDST意味着 外设作为目标地址
DMA_InitStruct.DMA_DIR=DMA_DIR_PeripheralSRC;
//储存器地址递增
DMA_InitStruct.DMA_MemoryInc=DMA_MemoryInc_Enable;
//外设器地址递增
DMA_InitStruct.DMA_PeripheralInc=DMA_PeripheralInc_Disable;
//内存数据单位
DMA_InitStruct.DMA_MemoryDataSize=DMA_MemoryDataSize_HalfWord; //砍一半 就是十六位了 因为ADC的精准度是12位
//外设数据单位
DMA_InitStruct.DMA_PeripheralDataSize=DMA_PeripheralDataSize_HalfWord;
//DMA模式 一次传输或者循环 一次传输
DMA_InitStruct.DMA_Mode=DMA_Mode_Circular;
//DMA优先级 随意
DMA_InitStruct.DMA_Priority=DMA_Priority_High;
//使能内存到内存的传输
DMA_InitStruct.DMA_M2M=DMA_M2M_Disable;
DMA_Init(DMA_CHANNEL, &DMA_InitStruct);
DMA_Cmd(DMA_CHANNEL, ENABLE);
以上就完成了ADC的采集和DMA的传输。
3.实现串口打印
通过初始化串口通信后,利用printf将数据打印到电脑
四、效果展示
连接线路,供电,SW引脚我并未连接 打开串口后效果图如下:
打开串口后效果图如下: 之后通过改变摇杆的位置可以得到不同的数据,记录后,可以分成不同的扇区,实现动作判断。开发更多功能
之后通过改变摇杆的位置可以得到不同的数据,记录后,可以分成不同的扇区,实现动作判断。开发更多功能
 文章来源:https://www.toymoban.com/news/detail-778480.html
文章来源:https://www.toymoban.com/news/detail-778480.html
感谢阅读!文章来源地址https://www.toymoban.com/news/detail-778480.html
到了这里,关于基于STM32的双轴XY摇杆传感器模块使用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!