本人软件工程专业,关于硬件只有408的基础,后续学习发现一些博主所讲以及b站上所给的教程并不是很清晰,故编写此文档供大家查看。
如果我说的地方哪里有问题,希望大家可以给出意见!(●ˇ∀ˇ●)
参考文档:
Modbus通讯协议常用功能码解释_modbus功能码_Lee139499的博客-CSDN博客
目录
一.什么是MODBUS RTU
1.关于MODBUS中的功能码
2.MODBUS RTU中的数据帧结构
编辑
二.代码上的实现
1.初始化定时器和USART
2.设置定时器为输入捕获模式
3.在USART接收中断中记录定时器值
4.自定义文件,针对于MODBUS协议对数据进行处理
三.使用软件
一.什么是MODBUS RTU
MODBUS是一种单主站的主/从通讯模式。Modbus网络上只有一个主站,主站在Modbus网络上没有地址,从站的地址范围为0-247,其中0为广播地址,从站的实际地址范围为1-247。
通信由主机发起,一问一答式,从机无法主动向主机发送数据。
传输过程中,两个字节之间的相邻时间不得大于3.5个字符的时间,否则视为一帧数据传输结束。
1.关于MODBUS中的功能码
常用的就是01、02、03、04、05、06、15、16,具体描述见下图:

2.MODBUS RTU中的数据帧结构

地址:设备的 MODBUS 地址,用于标识通信中的从设备。
功能码:表示对从设备执行的操作,例如读取保持寄存器、写单个寄存器等。
数据(2字节):传输的数据,由两个字节组成。具体数据内容可能根据功能码不同而有所变化。
CRC校验(2字节):用于验证数据的完整性,由两个字节组成。该校验值是在数据帧中的所有字段(包括地址、功能码和数据)被计算后得到的。

二.代码上的实现
此项目中,我使用的是STM32F103C8T6开发板,串口使用USART。
因为我只需要实现了03,06功能码,所以代码部分只有针对这两个功能码的实现。
那么,根据该协议,我们需要使用定时器来实现判断两个字节之间的相邻时间,确保数据传输的时间间隔不得大于设定好的时间。
在串口USART中判断两个字节之间的相邻时间,以确保数据帧传输不超过设定的时间阈值。我们使用一个定时器来记录两个字节之间的时间,并在定时器中断中进行判断。
步骤如下:
1.初始化定时器和USART
首先,你需要初始化定时器和USART,确保它们已经配置正确。
void Serial_Init(void){
// 1.开启时钟(USART与GPIO)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);// USART
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// GPIO
// 2.GPIO初始化(TX——复用输出,RX——输入)
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
// 3.配置USART
USART_InitTypeDef USART_InitStructure = {
.USART_BaudRate = 9600,// 波特率
.USART_HardwareFlowControl = USART_HardwareFlowControl_None, // 硬件流控制
.USART_Mode = USART_Mode_Tx | USART_Mode_Rx,// 指定发送功能 如果又要发送也要接收 可以采用 A | B 的格式
.USART_Parity = USART_Parity_No,// 校验位
.USART_StopBits = USART_StopBits_1,// 停止位
.USART_WordLength = USART_WordLength_8b
};
USART_Init(USART1,&USART_InitStructure);
// 开启中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
// 配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 初始化NVIC的USART1通道
NVIC_InitTypeDef NVIC_InitStructure = {
.NVIC_IRQChannel = USART1_IRQn,
.NVIC_IRQChannelCmd = ENABLE,
.NVIC_IRQChannelPreemptionPriority = 1,
.NVIC_IRQChannelSubPriority = 1
};
NVIC_Init(&NVIC_InitStructure);
// 4.开启USART(或配置中断)
USART_Cmd(USART1,ENABLE);
}以及定时器的相关配置:
void Timer_Init(uint16_t arr,uint16_t psc){
//RCC内部时钟 ON
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//时钟源选择
TIM_InternalClockConfig(TIM3);
//配置时机单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数
TIM_TimeBaseInitStructure.TIM_Period = arr ; // 因为预分频器和计数器都有1个数的偏差,所以这里要再减去一个1
TIM_TimeBaseInitStructure.TIM_Prescaler = psc ; // Tout = ((arr+1)*(psc+1))/Tclk ;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM3,TIM_IT_Update);
//配置输出中断控制
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM_Channel_3; // 中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 制特定中断通道的使能状态
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 响应优先级
NVIC_Init(&NVIC_InitStructure);
//启动定时器
TIM_Cmd(TIM3,ENABLE);
}2.设置定时器为输入捕获模式
将定时器设置为输入捕获模式,以便在USART接收到一个字节时记录定时器的值。
// 配置定时器通道为输入捕获模式
void configure_input_capture() {
// 配置输入捕获通道 CHx 为输入捕获模式
TIM3->CCMR1 |= TIM_CCMR1_CC1S_0; // 将CC1S位设置为01,选择输入捕获通道1为TI1
// 配置输入捕获通道 CHx 的触发边沿或状态变化条件
TIM3->CCER |= TIM_CCER_CC1P; // 设置捕获边沿为下降沿触发,如果需要上升沿触发,可以选择设置为TIM_CCER_CC1NP
// 使能捕获通道 CHx
TIM3->CCER |= TIM_CCER_CC1E;
}3.在USART接收中断中记录定时器值
在USART接收中断中,记录定时器的当前值,并在接收到字节时启动或重置定时器。
// 定时器中的变量定义:
volatile uint32_t last_capture_time = 0;
const uint32_t max_frame_time = 4000; // 设定的最大帧传输时间,单位为定时器计数值
// 串口中的变量定义:
uint8_t Serial_RxPacket[100] = {0};
uint16_t Serial_RxLength = 0;
uint8_t Serial_RxFlag;
uint8_t clearBufferFlag = 0;以下为定时器的中断配置:
void TIM3_IRQHandler(void){
if(TIM_GetITStatus(TIM3,TIM_IT_CC3) != RESET){ // 输入捕获中断触发,计算两个捕获之间的时间间隔
uint32_t current_capture_time = TIM_GetCapture1(TIM3);
uint32_t time_interval = current_capture_time - last_capture_time;
if (time_interval > max_frame_time) {
// 超过设定的最大帧传输时间,认为一帧数据传输结束
// 处理完整的数据帧
Serial_RxFlag = 1;
}
// 重置定时器捕获时间
last_capture_time = current_capture_time;
TIM_ClearITPendingBit(TIM3,TIM_IT_CC3);
}
}
以下为串口USART的中断配置:
void USART1_IRQHandler(void){
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
// 接收到一个字节数据,记录定时器的当前值
last_capture_time = TIM_GetCapture3(TIM3);
Serial_RxPacket[Serial_RxLength++] = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1,USART_IT_RXNE);// 清除标志位
}
}在定时器输入捕获中断中判断两个字节之间的时间: 当定时器捕获到第二个字节时,计算两个捕获之间的时间间隔。如果这个时间间隔超过设定的阈值,则视为一帧数据传输结束。
4.自定义文件,针对于MODBUS协议对数据进行处理
#include "stm32f10x.h"
#include "Timer.h"
#include "Serial.h"
uint8_t Serial_TxPacket[100] = {0}; // 发送内容
extern uint8_t Serial_RxPacket[100]; // 接收内容
extern uint16_t Serial_RxLength;
extern uint16_t modbus_io[100]; // modbus寄存器内数据
// uint16_t modbus_id = 0X01; // id号
uint16_t modbus_function; // 功能码
uint16_t modbus_check; // 校验位
uint16_t modbus_packege_times = 0; // 总包计数
uint16_t CRC_check_result; // CRC校验的结果
uint16_t calculate_crc16(const uint8_t *data, size_t len) {
// printf("%d\n",len);
// 初始化crc为0xFFFF
uint16_t crc = 0xFFFF;
// 循环处理每个数据字节
for (size_t i = 0; i < len; i++) {
// 将每个数据字节与crc进行异或操作
crc ^= data[i];
// 对crc的每一位进行处理:如果最低位为1,则右移一位并执行异或0xA001操作(即0x8005按位颠倒后的结果)
for (int j = 0; j < 8; j++) {
if (crc & 0x0001) {
crc = (crc >> 1) ^ 0xA001;
}
// 如果最低位为0,则仅将crc右移一位
else {
crc = crc >> 1;
}
}
}
return crc;
}
void Data_Funcion_3(void){
Serial_TxPacket[0] = Serial_RxPacket[0]; // ID
Serial_TxPacket[1] = Serial_RxPacket[1]; // 功能码
// 字节长度,根据接收的内容4,5位来判断
Serial_TxPacket[2] = (Serial_RxPacket[4] << 8 | Serial_RxPacket[5]) * 2;
for(modbus_packege_times = 0;modbus_packege_times<Serial_TxPacket[2];modbus_packege_times+=2)
{
Serial_TxPacket[3+modbus_packege_times] = modbus_io[modbus_packege_times / 2] >> 8;
Serial_TxPacket[4+modbus_packege_times] = modbus_io[modbus_packege_times / 2];
}
// 校验码
CRC_check_result = calculate_crc16(Serial_TxPacket,Serial_TxPacket[2] + 3);
Serial_TxPacket[3+modbus_packege_times] = (CRC_check_result) & 0xFF;
Serial_TxPacket[4+modbus_packege_times] = (CRC_check_result>>8) & 0xFF;
Serial_SendArray(Serial_TxPacket,5+modbus_packege_times);
return ;
}
void Data_Funcion_6(void){
// Serial_TxPacket[0] = Serial_RxPacket[0]; // ID
// Serial_TxPacket[1] = Serial_RxPacket[1]; // 功能码
modbus_io[Serial_RxPacket[3] - 1] = Serial_RxPacket[4];
modbus_io[Serial_RxPacket[3]] = Serial_RxPacket[5];
Serial_SendArray(Serial_RxPacket,Serial_RxLength);
return ;
}
void Data_Resolve(void){
// 需增加校验位计算
modbus_check = calculate_crc16(Serial_RxPacket,Serial_RxLength-2);
if(modbus_check != 0) // 校验是否通过
{
Serial_TxPacket[0] = 0x01; // 预设id
if(Serial_RxPacket[0] == Serial_TxPacket[0]){ // 确认id号是否一致
modbus_function = Serial_RxPacket[1];
switch(modbus_function)
{
case 3 : // 根据03功能码,主机要求从机反馈内容
Data_Funcion_3();
break;
case 6 :
Data_Funcion_6();
break;
// case 16 :
// Serial_SendArray(Serial_TxPacket,Serial_RxLength);
// break;
default :
break;
}
}
}
Serial_RxFlag = 0;
Serial_RxLength = 0;
}
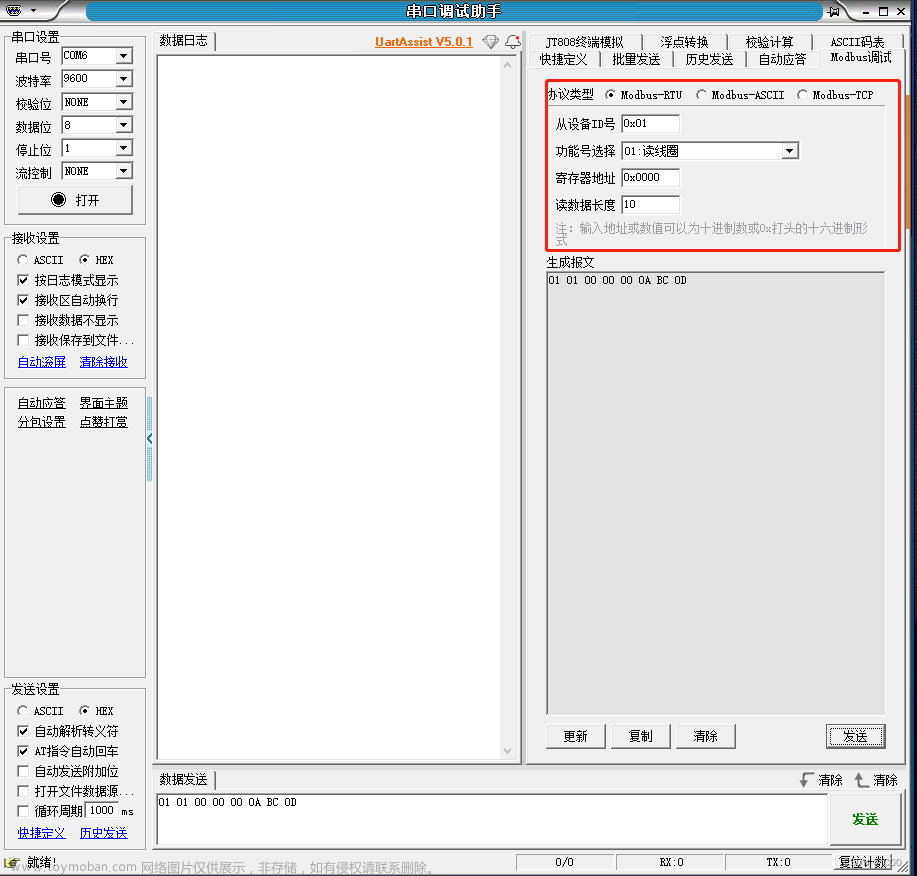
三.使用软件
使用Keil给板子上程序后,我这边使用了Modbus Pull和Modbus Slave做实验,网上可以查到并且下载。
我们如果使用板子当作从机的话,那么只需要使用到Pull就可以了,不需要使用到Slave。
工程代码:
github上的项目工程文章来源:https://www.toymoban.com/news/detail-779626.html
目前我只做了这两个功能码,如果这边有什么错误的地方还请大佬们给出指点(。・∀・)~文章来源地址https://www.toymoban.com/news/detail-779626.html
到了这里,关于STM32硬件库(非HAL库)实现MODBUS RTU协议的03,06功能码(读以及与单个发送)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!