当使用单片机进行项目开发,涉及大量数据需要储存时(例如使用了屏幕作为显示设备,常常需要存储图片、动画等数据),单靠单片机内部的Flash往往是不够用的。

如STM32F103系列,内部Flash最多只能达到512KByte,假设要储存240*240分辨率、64K彩色图片,只够存储4张左右。如果使用外置储存器,将图片等其他数据放置在外置储存器,内部Flash只储存程序,就能减小内部Flash的需求,降低成本。  Flash种类有很多,按其制程和制作工艺的不同可分为NOR Flash、NAND Flash。NAND的串行结构使得其容量很容易做的很大(SD卡、U盘、硬盘大都采用该类Flash),但是其读取速度却比不上并行结构的NOR Flash,且可靠性要差些,一旦出现数据块坏点,是不可逆、无法修复的。由于其数据存储原理,Flash在写入新的数据之前,都需要将数据地址所在的块擦除,NOR Flash的擦除速度比NAND慢很多。
Flash种类有很多,按其制程和制作工艺的不同可分为NOR Flash、NAND Flash。NAND的串行结构使得其容量很容易做的很大(SD卡、U盘、硬盘大都采用该类Flash),但是其读取速度却比不上并行结构的NOR Flash,且可靠性要差些,一旦出现数据块坏点,是不可逆、无法修复的。由于其数据存储原理,Flash在写入新的数据之前,都需要将数据地址所在的块擦除,NOR Flash的擦除速度比NAND慢很多。

Flash按其数据传输方式的不同可分为并口传输与串口传输。STM32的并口传输需使用FSMC接口,虽然其读写速度很快,但对于100PIN脚以下的封装是不带FSMC功能的。

所以使用更多的是串口传输方式。串口方式一般采用的是SPI通讯。

W25Q系列Flash是Winbond(台湾华邦科技)生产的SPI Flash系列,是单片机开发中比较常用的外置Flash。其支持标准四线SPI、Dual SPI、Quad SPI、QPI,其时钟频率分别可达到104MHz、208MHz、416MHz。对于STM32F103系列,其主频最高72MHz(SPI通信速率最高18Mbps),所以标准SPI就已经是足够F103系列单片机使用了。这里我使用W25Q128FV来讲解Flash的使用。

先来了解其引脚定义,上面展示的是SOP8封装,还有SOP16封装的,功能都是差不多的。
 /CS: Flash的片选引脚。当/CS高时,Flash的串行数据输出(DO或IO0、IO1、IO2、IO3)引脚处于高阻抗,此时设备功耗将处于待机水平(除非正在进行内部擦除、程序或写入状态寄存器周期)。当/CS为低电平,Flash将被选中,功耗将增加到活动水平,并且可以向该设备写入指令和从该设备读取数据。启动后,/CS必须从高电平转换到低电平,才能接受新的指令。
/CS: Flash的片选引脚。当/CS高时,Flash的串行数据输出(DO或IO0、IO1、IO2、IO3)引脚处于高阻抗,此时设备功耗将处于待机水平(除非正在进行内部擦除、程序或写入状态寄存器周期)。当/CS为低电平,Flash将被选中,功耗将增加到活动水平,并且可以向该设备写入指令和从该设备读取数据。启动后,/CS必须从高电平转换到低电平,才能接受新的指令。
DO(IO1):DO指数据输出口(Data Out),一般连接到单片机SPI接口的数据输入端,即MISO。IO1是其复用功能,当启用SPI四位传输模式时,该引脚功能为IO1.
/WP:写保护(WP)引脚。可以用来防止状态寄存器被写入。与状态寄存器的块保护(CMP, SEC, TB, BP2, BP1和BPO)位和状态寄存器保护(SRP)位一起使用,小到4KB扇区或整个内存阵列都可以被硬件保护。/WP引脚低电平有效。当状态寄存器2的QE位设置为Quad I/O时,/WP引脚功能不可用,因为该引脚用于IO2。如果不想使用该功能,可以直接将该引脚接VCC。
GND:Flash的供电GND
DI:DI指数据输入口(Data In),一般连接到单片机SPI接口的数据输出端,即MOSI。IO0是其复用功能,当启用SPI四位传输模式时,该引脚为IO0
CLK:SPI时钟线。连接至单片机的SPI时钟接口。
/HOLD,/RESET:/HOLD能让设备主动暂停数据传输。当/HOLD低时,而/CS低时,DO引脚将处于高阻抗,Dl和CLK引脚上的信号将被忽略。当/HOLD调高时,设备可以恢复运行。当多个设备共享相同的SPl信号时,/HOLD就能发挥作用。 /RESET引脚用于设备复位。注意,如果在写入数据时复位,可能会造成数据丢失。所以如果不需要给Flash复位,该引脚常常直接与VCC相接。
VCC:Flash供电电源3.3V。

不管何种存储器,在进行数据读写时都需要知道数据的地址。数据存储在寄存器中,所以数据的地址即寄存器地址。我们来看看W25Q128的内部原理图。

其内部是由数据存储单元和各种控制器组成。
存储单元的最小单位为一个寄存器,每个寄存器可存储1个字节的数据。
每256个寄存器组成一页(Page),也就是一页能存储256Byte数据,
每16页组成一个扇区(Sector),一个扇区能储存16x256=4096Byte数据(近似4KB)。比如扇区0的数据地址范围为000000 h-000FFF h。
每16个扇区又组成一个块(Block),一个块能储存4096x16=65536Byte数据(近似64K)。例如块0的数据地址范围为000000 h-00FFFF h 。
整个存储单元共256个块,所以其总存储容量为256x65536=16777216Byte数据,近似为16MByte。数据地址范围为000000 h-FFFFFF h。
不管何种外设,都是通过发送命令与数据来控制的。Flash也不例外,所以需要知道如何使用Flash,只需在其技术手册上找到其命令表即可。


可用的命令有很多,但常用的就一部分。
现在我们来讲解程序里如何实现STM32F103读写SPI Flash的数据。
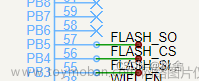
这里我使用的是SPI2,硬件连接如下。

再来看程序部分:
1.SPI2初始化。为了将读出来的数据显示出来,这里我使用串口将数据传输到电脑上。所以对usart1也初始化。
void SPI2_UserInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB的时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_15; //PA13为SCK时钟,PA15为MISO
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //PA14为MISO
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PA12为片选
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
SPI_InitTypeDef SPI_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE); //使能SPI时钟
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//设置双向双线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为SPI主站
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置为8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行时钟的稳态为时钟高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //位捕获的时钟活动沿为第1个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //指定NSS信号由软件控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //波特率预分频值
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据位从MSB开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC检验
SPI_Init(SPI2, &SPI_InitStructure); //按以上设置初始化SPI2
SPI_Cmd(SPI2, ENABLE); //使能SPI2
GPIO_SetBits(GPIOB,GPIO_Pin_12); //CS置高
}
void USART1_Userinit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA9为USART1_TX将这个GPIO初始化
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10为USART_RX,将这个GPIO初始化
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure; //定义USART配置结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //打开USART1时钟
USART_InitStructure.USART_BaudRate = 115200; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据帧位数
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位数目
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶模式(USART_Parity_No 无,USART_Parity_Even 偶SART_Parity_Odd奇)
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制模式
USART_InitStructure.USART_Mode = USART_Mode_Tx| USART_Mode_Rx; //发送、接收使能
USART_Init(USART1, &USART_InitStructure); //初始化
USART_Cmd(USART1,ENABLE); //使能USART1串口
USART_ITConfig(USART1,USART_IT_RXNE, ENABLE); //使能USART1接收中断
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure); //初始化中断
}2.发送命令或者读写数据都是通过最基本的发送数据、接受数据函数来实现。为了不出现数据丢失,每次发送数据前都需要判断上次发送的数据是否已经发送玩,这可以通过相关标志位来判断;同样,为了不出现数据重复,每次接收数据前都要判断接收缓存区是否为空。

void Flash_WriteData8(u8 Data) //写8位数据(1个字节)
{
u8 Wait=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET&&Wait<20) //检查指定的SPI标志位设置与否:发送缓存空标志位,RESET表示正在发送数据
{
Wait++;//循环计数200,计数200此(大概20us),不管是否标志位为空,都退出等待
}
SPI_I2S_ClearFlag(SPI2, SPI_I2S_FLAG_TXE); //清除发送完成标志位
SPI_I2S_SendData(SPI2,Data); //发送Data
}
u8 Flash_ReadData( ) //读一个字节
{
u8 Wait=0;
SPI_I2S_SendData(SPI2,0xff); //发送0x00,产生时钟信号,用来接收数据,也可以发送其他无响应的命令
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET&&Wait<200) //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
Wait++;
}
SPI_I2S_ClearFlag(SPI2, SPI_I2S_FLAG_RXNE); //清除标志位
return SPI_I2S_ReceiveData(SPI2); //返回通过SPI2最近接收的数据
}
u8 Flash_WriteReadByte(u8 Data) //读写函数
{
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位,RESET表示正在发送数据
{
}
SPI_I2S_SendData(SPI2,Data); //发送Data
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET) //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
}
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}需要注意:在接受数据的函数中,之所以在SPI_I2S_ReceiveData(SPI2)函数之前要使用SPI_I2S_SendData(SPI2,0xff)函数,是为了产生时钟信号。
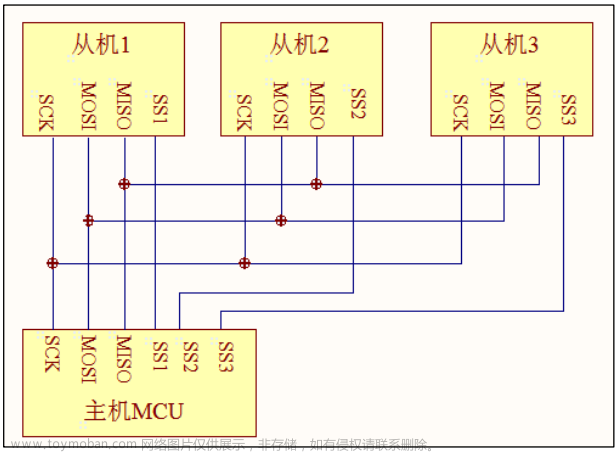
SPI采用的是主从通信结构,时钟信号只能由主设备产生,主设备发送数据的过程中会产生时钟信号,但是从设备发送数据时并不能自己产生时钟信号,所以就无法将数据一位一位发送出去(同步通信必须依靠时钟信号保持时序一致),那就只能依靠主设备产生时钟信号。主设备发送的0xFF,对从设备来说,是无效的数据,不会对该数据做出响应,但是主设备发送0xFF这个数据的时候,产生了时钟信号,所以从设备就依靠这段时钟信号,将数据发送给了主设备,主设备接受会暂存在接收缓存寄存器中,等接受到新的数据自动更新缓存器。

具体的通信时序可查阅W25Q128的技术手册(W25Q128FV_PDF_数据手册_Datasheet),这里就不一一列举了。
3.把W25Q128常用的命令封装成函数,只要调用对应的函数,就能实现命令的发送与数据的读写
#define Flash_CS_H() GPIO_SetBits(GPIOB,GPIO_Pin_12) //Flash 片选信号
#define Flash_CS_L() GPIO_ResetBits(GPIOB,GPIO_Pin_12) //低电平选中,高电平取消选中
/*****W25Q128常用命令定义*****/
#define W25X_WriteEnable 0x06 //写使能
#define W25X_WriteDisable 0x04 //写失能
#define W25X_ReadStatusReg 0x05 //读控制寄存器
#define W25X_WriteStatusReg 0x01 //写控制寄存器
#define W25X_ReadData 0x03 //写数据
#define W25X_FastReadData 0x0B //快速写数据
#define W25X_FastReadDual 0x3B //
#define W25X_PageProgram 0x02 //页编程
#define W25X_BlockErase32 0x52 //32K块擦除
#define W25X_BlockErase64 0xD8 //64K块擦除
#define W25X_SectorErase 0x20 //4k扇区擦除
#define W25X_ChipErase 0xC7 //整片擦除
#define W25X_PowerDown 0xB9 //
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB //读设备ID
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F //读取JEDECID
void Flash_WriteEnable(void) //使能写入
{
Flash_CS_L();
Flash_WriteReadByte(W25X_WriteEnable); //发送写使能
Flash_CS_H();
}
void Flash_WriteDisable(void) //禁止写入
{
Flash_CS_L();
Flash_WriteReadByte(W25X_WriteDisable); //发送写禁止指令
Flash_CS_H();
}
/**
* @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕
* @param none
* @retval none
*/
void SPI_FLASH_WaitBusy(void)
{
u8 FLASH_Status = 0;
Flash_CS_L();
Flash_WriteReadByte(W25X_ReadStatusReg1); //发送读取状态寄存器命令
do
{
FLASH_Status=Flash_WriteReadByte(0xff);
}
while ((FLASH_Status & 0x01) == 1); //判断是否正忙
Flash_CS_H();
}
/******************基本功能*****************/
/************读Flash状态寄存器1************/
u8 Flash_ReadSR1(void) //读状态寄存器1(busy时也可读)
{
u8 Byte;
Flash_CS_L(); //CS选中
Flash_WriteReadByte(W25X_ReadStatusReg1); //发送读取状态寄存器命令
Byte=Flash_WriteReadByte(0xff); //读取一个字节
Flash_CS_H(); //CS取消选中
return Byte;
}
u8 Flash_ReadSR2(void) //读状态寄存器2(busy时也可读)
{
u8 Byte;
Flash_CS_L(); //CS选中
Flash_WriteReadByte(W25X_ReadStatusReg2); //发送读取状态寄存器命令
Byte=Flash_WriteReadByte(0xff); //读取一个字节
Flash_CS_H();
return Byte;
}
u8 Flash_ReadSR3(void) //读状态寄存器3(busy时也可读)
{
u8 Byte;
Flash_CS_L(); //CS选中
Flash_WriteReadByte(W25X_ReadStatusReg3); //发送读取状态寄存器命令
Byte=Flash_WriteReadByte(0xff); //读取一个字节
Flash_CS_H();
return Byte;
}
void Flash_WriteSR1(u8 Sr) //写入
{
Flash_WriteEnable();
Flash_CS_L();
Flash_WriteReadByte(W25X_WriteStatusReg); //发送写状态寄存器命令
Flash_WriteReadByte(Sr); //写入一个字节
Flash_CS_H();
}
void Flash_WriteSR2(u8 Sr)
{
Flash_WriteEnable();
Flash_CS_L();
Flash_WriteReadByte(W25X_WriteStatusReg2); //发送写状态寄存器命令
Flash_WriteReadByte(Sr); //写入一个字节
Flash_CS_H();
}
void Flash_WriteSR3(u8 Sr)
{
Flash_WriteEnable();
Flash_CS_L();
Flash_WriteReadByte(W25X_WriteStatusReg3); //发送写状态寄存器命令
Flash_WriteReadByte(Sr); //写入一个字节
Flash_CS_H();
}
u16 Flash_ReadID(void) //读取设备ID(16位JEDEC assigned Manufacturer ID )
{
u16 Temp ;
u8 TempL,TempH;
Flash_CS_L();
Flash_WriteReadByte(W25X_ManufactDeviceID); //发送读取ID命令
Flash_WriteReadByte(0x00); //指令通过将/CS引脚压低并移动指令代码“90h”和24位地址000000h来启动。
Flash_WriteReadByte(0x00);
Flash_WriteReadByte(0x00);
TempH=Flash_WriteReadByte(0xff); //接收高8位
TempL=Flash_WriteReadByte(0xff); //接收高8位
Flash_CS_H();
Temp=TempH;
Temp<<=8; //左移8位
Temp|=TempL; //高8位与低8位合并成16位(与运算后赋值)
return Temp;
}
void Flash_ReadSector(u32 ReadAddr) //读一个扇区
{
u16 i;
Flash_CS_L();
Flash_WriteReadByte(W25X_ReadData); //发送读取命令
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE)==RESET)//判断发送缓存区是否为空
{
}
Flash_WriteReadByte((u8)((ReadAddr)>>16)); //发送24bit地址
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE)==RESET)//判断发送缓存区是否为空
{
}
Flash_WriteReadByte((u8)((ReadAddr)>>8));
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE)==RESET)//判断发送缓存区是否为空
{
}
Flash_WriteReadByte((u8)ReadAddr);
for(i=0;i<4096;i++) //一个扇区4096个Byte
{
FlashSector_Buffer[i]=Flash_WriteReadByte(0xff); //循环读取每个字节存在 扇区缓存中
}
Flash_CS_H();
}
void Flash_ReadPage(u32 ReadAddr) //读一页
{
u16 i;
while((Flash_ReadSR1()&0x00)==0x01); // 等待BUSY位清空(等待擦除完成)
{
}
Flash_CS_L();
Flash_WriteReadByte(W25X_ReadData); //发送读取命令
Flash_WriteReadByte((u8)((ReadAddr)>>16)); //发送24bit地址
Flash_WriteReadByte((u8)((ReadAddr)>>8));
Flash_WriteReadByte((u8)ReadAddr);
for(i=0;i<256;i++) //一个页256个Byte
{
FlashPage_Buffer[i]=Flash_WriteReadByte(0xff); //循环读取每个字节存在 扇区缓存中
}
Flash_CS_H();
}
void Flash_EraseSector(u32 Dst_Addr) //擦除扇区(150ms左右)
{
Flash_WriteEnable(); //在设备接受扇区擦除指令(状态寄存器位WEL必须等于1)之前,必须执行Write Enable指令。
while((Flash_ReadSR1()&0x02)==0x00); // 等待BUSY位清空(等待擦除完成)
{
}
Flash_CS_L();
Flash_WriteReadByte(W25X_SectorErase); //发送扇区擦除指令
Flash_WriteReadByte((u8)((Dst_Addr)>>16)); //发送24bit地址
Flash_WriteReadByte((u8)((Dst_Addr)>>8));
Flash_WriteReadByte((u8)Dst_Addr);
Delay_us(1);
Flash_CS_H(); //在最后一个字节的第8位被锁存之后,/CS引脚必须置高。否则扇区擦除指令不执行
while((Flash_ReadSR1()&0x01)==0x01); // 等待BUSY位清空(等待擦除完成)
{
Delay_us(1);
}
}
void Flash_EraseChip(void) //整片擦除(4s左右)
{
Flash_WriteEnable(); //在设备接受扇区擦除指令(状态寄存器位WEL必须等于1)之前,必须执行Write Enable指令。
Delay_us(10);
Flash_CS_L();
Flash_WriteReadByte(W25X_ChipErase); //发送整片擦除指令
Flash_CS_H(); //在最后一个字节的第8位被锁存之后,/CS引脚必须置高。否则擦除指令不执行
while((Flash_ReadSR1()&0x01)==0x01); // 等待BUSY位清空(等待擦除完成)
{
//Sr=Flash_ReadSR1();
Delay_us(1);
}
}
void Flash_WritePage(u32 WriteAddr) //写一页(每次写入的最大数量为1页)
{
u16 i;
Flash_WriteEnable();
while((Flash_ReadSR1()&0x01)==0x01); // 等待BUSY位清空(等待擦除完成)
{
}
Flash_CS_L();
Flash_WriteReadByte(W25X_PageProgram); //发送写页命令
Flash_WriteReadByte((u8)((WriteAddr)>>16)); //发送24bit地址
Flash_WriteReadByte((u8)((WriteAddr)>>8));
Flash_WriteReadByte((u8)WriteAddr);
for(i=0;i<256;i++)
{
Flash_WriteReadByte(FlashPage_Buffer[i]);
}
Flash_CS_H();
while((Flash_ReadSR1()&0x01)==0x01); // 等待BUSY位清空(等待擦除完成)
{
}
}
void Flash_WriteReadBytes(u32 WriteAddr,u8 NumByte) //写入多个字节(不大于256)
{
u8 i;
Flash_CS_L();
Flash_WriteReadByte(W25X_PageProgram); //发送写页命令
Flash_WriteReadByte((u8)((WriteAddr)>>16)); //发送24bit地址
Flash_WriteReadByte((u8)((WriteAddr)>>8));
Flash_WriteReadByte((u8)WriteAddr);
for(i=0;i<NumByte;i++)
{
Flash_WriteReadByte(FlashPage_Buffer[i]);
}
Flash_CS_H();
}
u16 Flash_Init(void) //SPI Flash初始化
{
u16 ID;
Flash_CS_L();
Flash_WriteReadByte(W25X_ReleasePowerDown); //退出休眠
Flash_CS_H();
ID=Flash_ReadID();
return ID;
}4.主函数。先读取设备ID,然后将数组ARR1的数据写入Flash的扇区0,再将扇区0的数据读取出来放在数组ARR2中,通过串口将ARR2的数据显示到电脑(串口调试助手)。
#include<stm32f10x.h>
u8 ARR1[10]={0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A};//随意填入几个元素,后面将其元素写入Flash中
u8 ARR2[10]; //后面将Flash的数据读出来,复制到该数组中
void USART_SendDatatoUSB( char ASCII[]) //串口发送字符串函数
{
u8 i,j,Wait;
for(i=0;i<12;i++)
{
u8 Wait=0;
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET&&Wait<200)
{
Wait++;//循环计数200,计数200此(大概20us),不管是否标志位为空,都退出等待
}
USART_ClearFlag(USART1,USART_FLAG_TC);
j=ASCII[i];
USART_SendData(USART1,j);
}
Wait=0;
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET&&Wait<200)
{
Wait++;//循环计数200,计数200此(大概20us),不管是否标志位为空,都退出等待
}
USART_ClearFlag(USART1,USART_FLAG_TC);
USART_SendData(USART1,10); //换行
}
int main()
{
SPI2_UserInit(); //SPI2初始化----控制SPI Flash
USART1_Userinit(); //USART1初始化--控制串口CH340
Flash_Write_Enable(); //Flash写使能
USART_SendDatatoUSB( "Flash:ID")
Data=Flash_ReadID(); //读取ID(16位)
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{
}
USART_SendData(USART1,(Data>>16)&0xFF);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{
}
USART_SendData(USART1,(Data>>8)&0xFF);
Flash_EraseSector(0x000000); //擦除扇区
USART_SendDatatoUSB( "扇区擦除完成");
Flash_WritePage(0x000000,10); //写入数据
USART_SendDatatoUSB( "数据写入成功");
Flash_ReadSector(0x000000) //读数据
USART_SendDatatoUSB( "数据读取成功");
for(i=0;i<10;i++)
{
u8 Wait=0;
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET&&Wait<200) //检查指定的SPI标志位设置与否:发送缓存空标志位,RESET表示正在发送数据
{
Wait++;//循环计数200,计数200此(大概20us),不管是否标志位为空,都退出等待
}
USART_ClearFlag(USART1,USART_FLAG_TC);
j=ARR2[i];
USART_SendData(USART1,j);
}
}最后接收到数据如下。文章来源:https://www.toymoban.com/news/detail-780357.html
 文章来源地址https://www.toymoban.com/news/detail-780357.html
文章来源地址https://www.toymoban.com/news/detail-780357.html
到了这里,关于STM32单片机初学8-SPI flash(W25Q128)数据读写的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!