#一、超声波HC_SR04简介
#二、超声波工作原理
#三、超声波测距步骤
#四、硬件接线
#五、项目代码
一、超声波HC_SR04简介
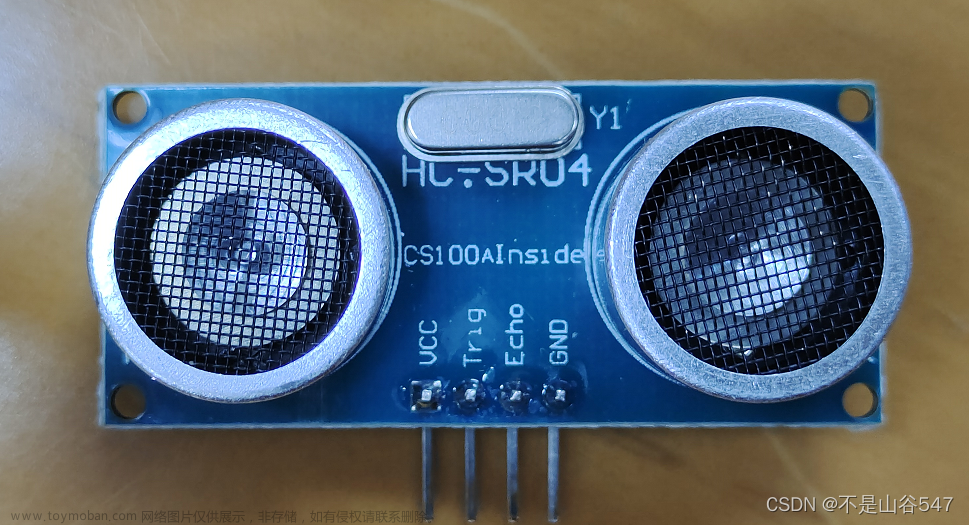
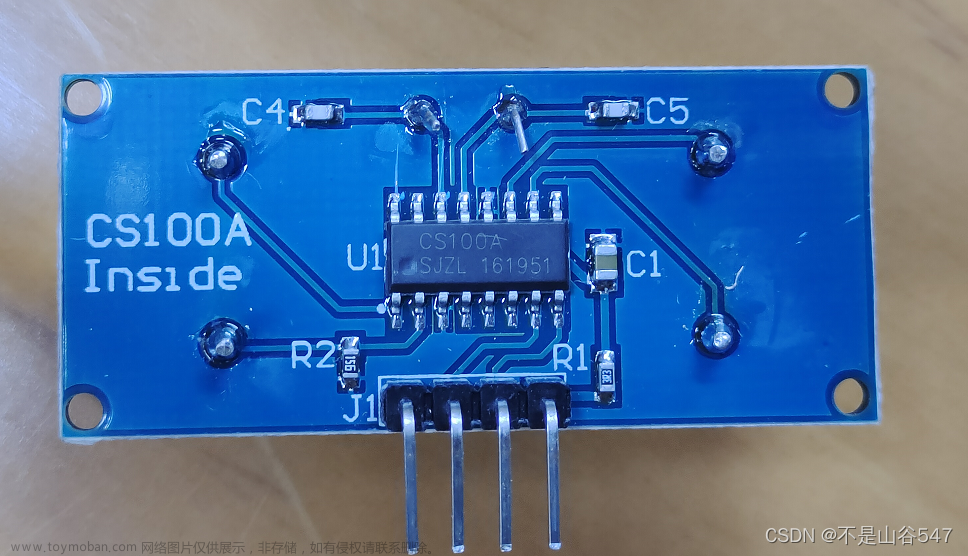
超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。电路板上有四个引脚:VCC、GND、Trig(触发)、Echo(回应)
工作电压与电流:5V,15mA
感应距离:2~400cm
感测角度:不小于15度
被测物体的面积不要小于50平方厘米并且尽量平整
具备温度补偿电路
超声波模块的触发脚(Trig)输入10us以上的高电位,即可发射超声波,发射超声波后,与接收到收回的超声波之前,“响应“脚(Echo)位呈现高电平。因此,程序可以“响应”脚位(Echo)的高电平脉冲持续时间,换算出被测物的距离。
二、超声波原理
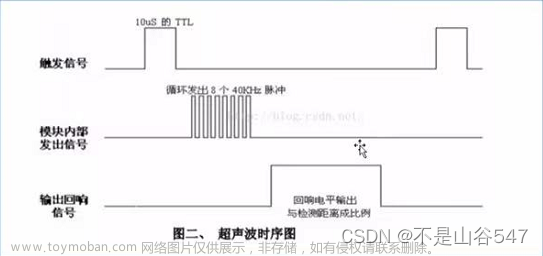
距离公式:
高电平持续时间*声速(340m/s)/2
三、超声波测距步骤
1.配置GPIO引脚结构体(Trig,Echo)
2.配置定时器结构体
3.配置定时器中断结构体
4.开启时钟(定时器、GPIO)
5.Trig引脚输出高电平(10us以上),然后关闭
6.等待Echo引脚输出高电平开始,定时器打开->开启计数器计数
7.等待Echo引脚输出高电平结束,定时器关闭->停止计数器计数
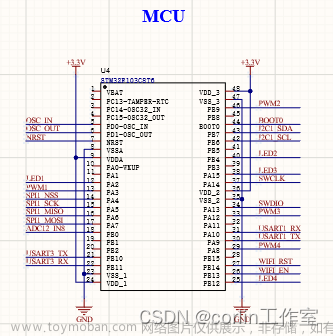
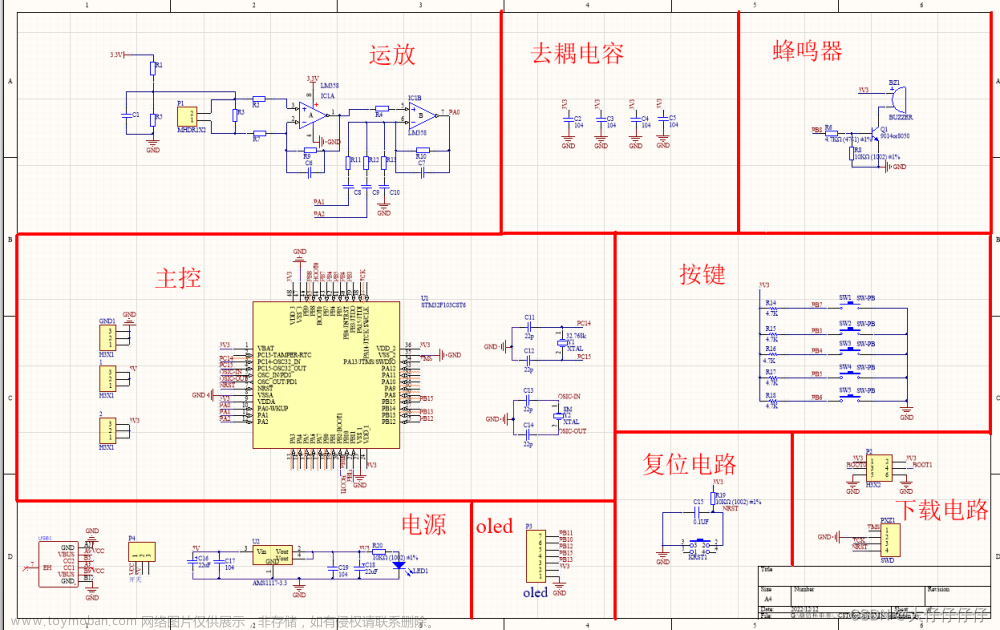
四、硬件接线
1.GND——GND
2.VCC——5V
3.Trig——PB11
4.Echo——PB10
五、项目代码
HC_SR04.C
#include "stm32f10x.h"
#include "hc_sr04.h"
#include "systick.h"
extern uint16_t mscount=0;//定义毫秒级计数
void HC_SR04Config(void)
{
GPIO_InitTypeDef GPIO_hcsr04init;//超声波时钟结构体初始化
TIM_TimeBaseInitTypeDef TIM_hcsr04init;//定时器时钟结构体初始化
NVIC_InitTypeDef NVIC_hcsr04init;//定时器中断结构体初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//中断定时器优先级分组
//1.打开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//打开GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//打开定时器时钟
//2.配置GPIO时钟
//Trig PB11 输出端 高电平
GPIO_hcsr04init.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_hcsr04init.GPIO_Pin = GPIO_Pin_11;//引脚11
GPIO_hcsr04init.GPIO_Speed = GPIO_Speed_50MHz;//速度为50Mhz
GPIO_Init(GPIOB,&GPIO_hcsr04init);//配置GPIO初始化函数
//Echo PB10 输入端
GPIO_hcsr04init.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_hcsr04init.GPIO_Pin = GPIO_Pin_10;//引脚10
GPIO_Init(GPIOB,&GPIO_hcsr04init);//配置GPIO初始化函数
//3.配置定时器结构体
TIM_hcsr04init.TIM_ClockDivision = TIM_CKD_DIV1;//不分频
TIM_hcsr04init.TIM_CounterMode = TIM_CounterMode_Up;//计数模式为向上计数
TIM_hcsr04init.TIM_Period = 100-1;//重装载值为99
TIM_hcsr04init.TIM_Prescaler = 72-1;//分频系数为71
TIM_TimeBaseInit(TIM4,&TIM_hcsr04init);//配置定时器初始化函数
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);//使能定时器中断
TIM_Cmd(TIM4,DISABLE);//失能定时器
//4.配置定时器中断结构体
NVIC_hcsr04init.NVIC_IRQChannel = TIM4_IRQn;//配置通道4
NVIC_hcsr04init.NVIC_IRQChannelCmd = ENABLE;//使能定时器中断
NVIC_hcsr04init.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级为0
NVIC_hcsr04init.NVIC_IRQChannelSubPriority = 0;//子优先级为0
NVIC_Init(&NVIC_hcsr04init);//配置中断初始化
}
void Open_Tim4(void)//定时器开启
{
TIM_SetCounter(TIM4,0);//开启定时器
mscount=0;
TIM_Cmd(TIM4,ENABLE);//打开定时器
}
void Close_Tim4(void)//定时器关闭
{
TIM_Cmd(TIM4,DISABLE);//失能定时器
}
void TIM4_IRQHandler(void)//中断服务函数(判断是否发生中断)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除中断标志位
mscount++;
}
}
int GetEcho_time(void)//获取定时器的数值
{
uint32_t t=0;
t=mscount*1000;//中断时间
t+= TIM_GetCounter(TIM4);//得到定时器计数时间
TIM4->CNT=0;//重装载值为0
ms_delay(50);//延迟50ms
return t;
}
float Getlength(void)//获取距离长度
{
int i=0;//定义次数i
uint32_t t=0;//定义时间t
float length=0; //定义长度length
float sum=0;//距离求和
while(i!=5)//发送5次超声波
{
TRIG_Send(1);//发送超声波
us_delay(20);//发送20us
TRIG_Send(0);//停止发送超声波
while(ECHO_Reci==0);//当超声波发出后
Open_Tim4();//打开定时器
i=i+1; //次数加一
while(ECHO_Reci==1);//当收到超声波返回信号
Close_Tim4();//关闭定时器
t=GetEcho_time();//获取定时器计数数值
length=((float)t/58.0);//计算出距离长度
sum=sum+length;//距离长度求和
}
length=sum/5.0;//计算距离平均值
return length;//返回距离长度
}
HC_SR04.h
#include "stm32f10x.h"
#ifndef _HC_SR04_H
#define _HC_SR04_H
void HC_SR04Config(void);
void Open_Tim4(void);
void Close_Tim4(void);
int GetEcho_time(void);
float Getlength(void);
#define TRIG_Send(a) if(a)\
GPIO_SetBits(GPIOB,GPIO_Pin_11);\
else\
GPIO_ResetBits(GPIOB,GPIO_Pin_11)
#define ECHO_Reci GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)
#endif
usart.c
#include "stm32f10x.h"
#include "usart.h"
#include <stdio.h>
void usart_init(void)
{
GPIO_InitTypeDef gpioinstructure;//GPIO结构体初始化函数
USART_InitTypeDef usartinstructure;//USART结构体初始化函数
NVIC_InitTypeDef nvicinstructure;//中断控制器结构体初始化函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置中断控制器优先抢占级组
//1.配置GPIO、USART、引脚复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//配置GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//配置引脚复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//配置USART时钟
//2.配置GPIO结构体
//配置PA9 TX 输出引脚
gpioinstructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
gpioinstructure.GPIO_Pin = GPIO_Pin_9 ;//引脚9
gpioinstructure.GPIO_Speed = GPIO_Speed_50MHz;//速度为50Mhz
GPIO_Init(GPIOA,&gpioinstructure);//GPIO初始化
//配置PA10 RX 接收引脚
gpioinstructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输出
gpioinstructure.GPIO_Pin = GPIO_Pin_10;//引脚10
GPIO_Init(GPIOA,&gpioinstructure);//GPIO初始化
//3.配置串口的结构体
usartinstructure.USART_BaudRate = 115200;//波特率为115200
usartinstructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件流配置
usartinstructure.USART_Mode = USART_Mode_Rx|USART_Mode_Tx ;//接收模式
usartinstructure.USART_Parity = USART_Parity_No;//无校验位
usartinstructure.USART_StopBits = USART_StopBits_1;//一个停止位
usartinstructure.USART_WordLength = USART_WordLength_8b;//有效数据位为8位
USART_Init(USART1,&usartinstructure);//初始化串口1
USART_Cmd(USART1,ENABLE); //使能串口1
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//串口中断配置
//4.配置中断控制器的结构
nvicinstructure.NVIC_IRQChannel = USART1_IRQn;//中断通道
nvicinstructure.NVIC_IRQChannelCmd = ENABLE; //通道使能
nvicinstructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级配置为1
nvicinstructure.NVIC_IRQChannelSubPriority = 1;//子优先级配置为1
NVIC_Init(&nvicinstructure);//中断控制器初始化
}
//发送字符
void USARTSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx, Data);
while(USART_GetFlagStatus(USARTx,USART_FLAG_TXE)==RESET);
}
//发送字符串
void USARTSendStr(USART_TypeDef* USARTx, char *str)
{
uint16_t i=0;
do
{
USARTSendByte(USARTx,*(str+i));
i++;
}while(*(str+i)!='\0');
while(USART_GetFlagStatus(USARTx,USART_FLAG_TC)==RESET);
}
//printf函数的重映射
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,(uint8_t)ch);//发送
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);//发送数据寄存器空标志位判断
return (ch);
}
int fgetc(FILE *f)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==RESET);//接收数据寄存器非空标志位判断
return (int)USART_ReceiveData(USART1);//返回接收到的字符
}
usart.h文章来源:https://www.toymoban.com/news/detail-780389.html
#include "stm32f10x.h"
#include <stdio.h>
void usart_init(void);
void USARTSendStr(USART_TypeDef* USARTx, char *str);
main.c文章来源地址https://www.toymoban.com/news/detail-780389.html
#include "stm32f10x.h"
#include "main.h"
#include "LED.h"
#include "usart.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "tim.h"
#include "motor.h"
#include "systick.h"
#include "hc_sr04.h"
void delay(uint16_t time)//延迟函数
{
uint16_t i=0;
while(time--)
{
i=12000;
while(i--);
}
}
int main()
{
// int pwmval=195;
float Length=0;
usart_init();//串口初始化
HC_SR04Config();//超声波初始化
while(1)
{
//pwmval=155;
Length=Getlength();//获取距离长度
printf("%.3f\r\n",Length);//打印距离长度
ms_delay(500);//延迟500ms
/*if(Length<5)
{
for(pwmval=195;pwmval>=155;pwmval-=15)
{
TIM_SetCompare2(TIM3,pwmval-20);
}
}*/
}
}
到了这里,关于基于STM32F103C8T6的超声波测距应用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车](https://imgs.yssmx.com/Uploads/2024/02/533808-1.png)