Open3D 降采样:让点云数据更加高效
点云数据处理是计算机视觉中重要的一项任务,而点云数据本身就非常庞大,需要消耗大量的计算资源进行处理。因此,点云数据的降采样是非常必要的。Open3D 是一个面向三维数据处理的开源库,提供了丰富的点云数据处理工具,其中包括随机下采样算法。本文将介绍如何使用 Open3D 的随机下采样算法对点云数据进行降采样。
首先,我们需要导入 Open3D 库:
import open3d as o3d
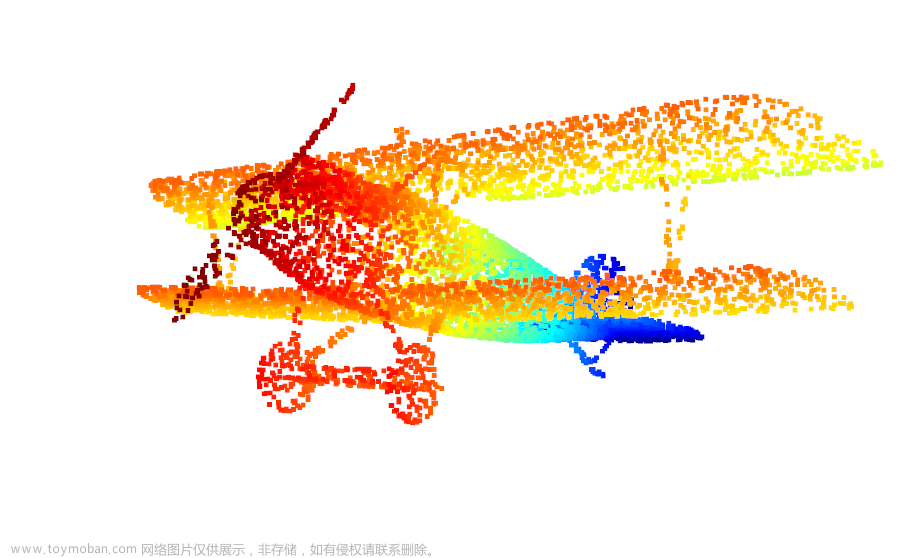
接着,读取点云数据并可视化:
pcd = o3d.io.read_point_cloud("pointcloud.ply")
o3d.visualization.draw_geometries([pcd])
随机下采样算法可以通过 voxel_down_sample 函数实现。这个函数会根据设定的采样密度来对点云数据进行下采样。
downpcd = pcd.voxel_down_sample(voxel_size=0.05)
o3d.visualization.draw_geometries([downpcd])
在这个例子中,我们将采样密度设置为 0.05,即每个立方体的边长为 0.05。函数会自动计算每个立方体中的点的重心,并用这个重心代替原立方体中的所有点。这样就实现了对点云数据的降采样。通过可视化可以发现,经过随机下采样之后,点云数据的密度大大降低,同时保留了数据的大部分特征。
除了随机下采样算法,Open3D 还提供了一些其他的降采样算法,如 Poisson 采样和几何采样等。这些算法都可以通过相应的函数调用来实现。在使用这些算法时应该根据数据的特点以及处理需求来选择合适的算法。文章来源:https://www.toymoban.com/news/detail-780625.html
以上就是使用 Open3D 进行随机下采样的基本方法。通过降采样可以大幅度减少点云数据的体积,让数据处理更加高效。文章来源地址https://www.toymoban.com/news/detail-780625.html
到了这里,关于Open3D 降采样:让点云数据更加高效的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!