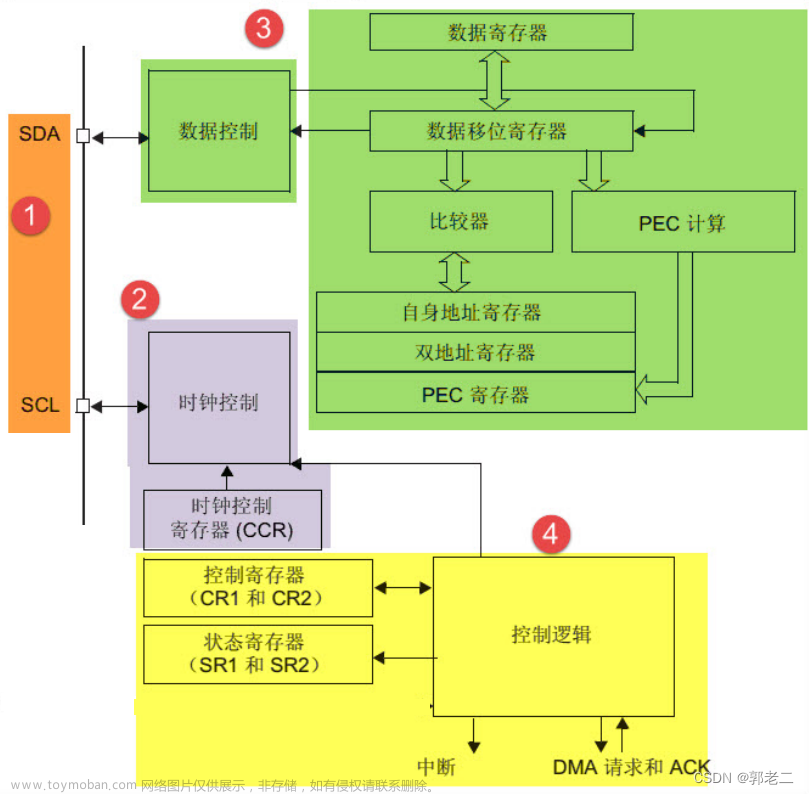
i2c_bit_shift
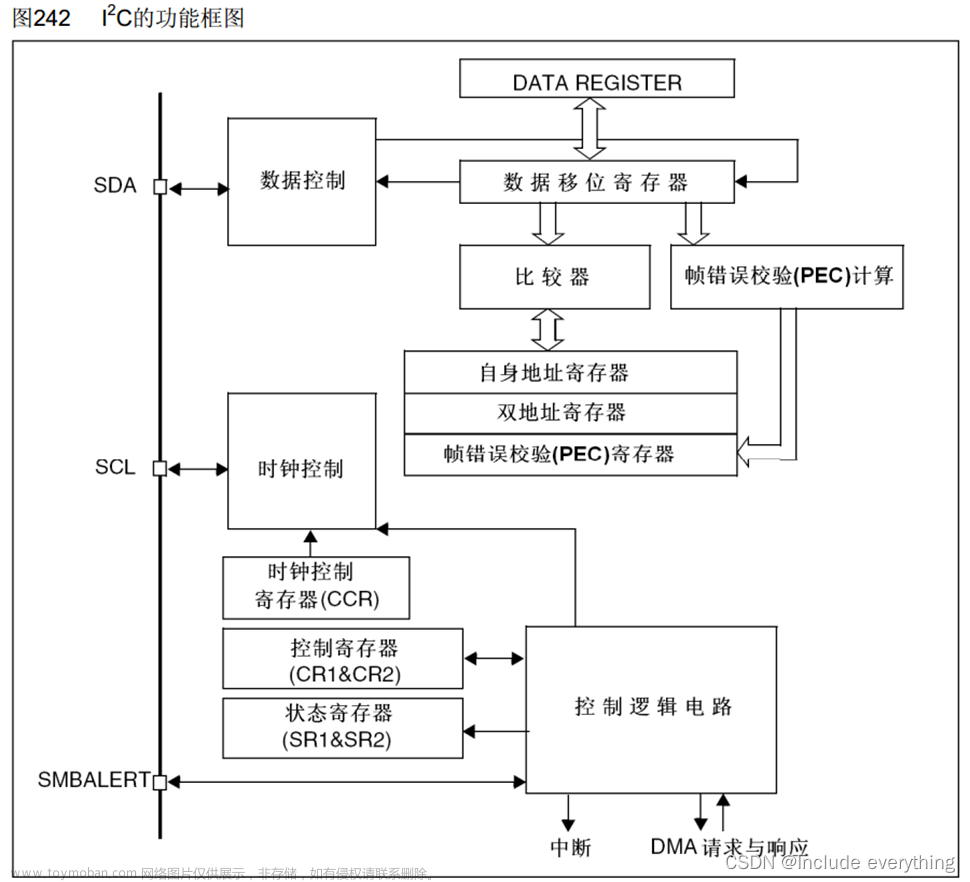
模块框图如下所示
输入输出信号:
整体的思路如下:
通过输入的命令组合,完成一次8字节数据的传输。定义了6种命令,
| WR | 写数据请求 (6’b000_001) |
|---|---|
| STA | 起始位请求(6’b000_010) |
| RD | 读数据请求(6’b000_100) |
| STO | 停止位请求(6’b001_000) |
| ACK | 应答位请求(6’b010_000) |
| NACK | 无应答请求(6‘b100_000) |
采用了状态机里面套用序列机的思路,在每个状态里面分为四步完成一位数据的传输,使用计数器来控制。定义的状态如下(独热码编码):
| state | discription |
|---|---|
| IDLE | 空闲状态 |
| GEN_STA | 产生起始信号 |
| WR_DATA | 写数据状态 |
| RD_DATA | 读数据状态 |
| CHECK_ACK | 检测应答信号 |
| GEN_ACK | 产生应答信号 |
| GNE_STO | 产生停止信号 |
状态机转换如下所示:
代码如下所示,有很清晰的注释:
module i2c_bit_shift (
input wire clk ,
input wire rst_n ,
input wire [5:0] cmd , //控制总线实现各种传输的各种命令组合
input wire go , //整个模块的启动信号
input wire [7:0] Tx_Data , //总线要发送的8位数据
output reg i2c_sclk , //i2c时钟总线
inout wire i2c_sdat , //i2c数据总线
output reg Trans_Done , //传输完成信号
output reg [7:0] Rx_Data , //总线要接收的8位数据
output reg ack_o //从机时候应答标志
);
localparam IDLE = 7'b0000_001, //空闲状态
GEN_STA = 7'b0000_010, //产生起始信号
WR_DATA = 7'b0000_100, //写数据状态
RD_DATA = 7'b0001_000, //读数据状态
CHECK_ACK = 7'b0010_000, //检测应答信号
GEN_ACK = 7'b0100_000, //产生应答信号
GNE_STO = 7'b1000_000; //产生停止信号
localparam WR = 6'b000_001, //写数据请求
STA = 6'b000_010, //起始位请求
RD = 6'b000_100, //读数据请求
STO = 6'b001_000, //停止位请求
ACK = 6'b010_000, //应答位请求
NACK = 6'b100_000; //无应答请求
parameter SYS_CLOCK = 50_000_000; //系统采用50MHz时钟
parameter SCL_CLOCK = 400_000 ; //SCL总线时钟采用400khz
localparam SCL_CNT_M = SYS_CLOCK / SCL_CLOCK / 4 - 1; //产生时钟SCL计数器最大值
reg en_div_cnt ; //计数器使能信号
reg i2c_sda_oe ; //三态门使能信号,1:输出,0:输入
reg [6:0] state ; //状态机的状态变量
reg [5:0] cnt ; //计数器
reg i2c_sdat_o ; //输出的i2c_sdat_o
reg [19:0] div_cnt ; //分频信号
wire sclk_plus = (div_cnt == SCL_CNT_M); //dic_cnt计数到最大值产生一个高脉冲
//reset为低时,若干信号的初始化
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
en_div_cnt <= 1'b0;
i2c_sda_oe <= 1'b1;
state <= IDLE;
cnt <= 0;
i2c_sdat_o <= 1'b0;
i2c_sclk <= 1'b1;
Rx_Data <= 8'd0;
end
end
//一段式状态机
always @(posedge clk or negedge rst_n) begin
case(state)
IDLE: begin
Trans_Done <= 1'b0;
i2c_sda_oe <= 1'b1;
if(go) begin //整个模块的启动信号go
en_div_cnt <= 1'b1; //使能div_cnt计数器,跳转的状态都需要这个计数器
if(cmd & STA ) //起始命令
state <= GEN_STA; //跳转到起始状态
else if(cmd & WR) //写命令
state <= WR_DATA; //跳转到写数据状态
else if(cmd & RD) //读命令
state <= RD_DATA; //跳转到读数据状态
else
state <= IDLE; //都不满足则跳转到IDLE状态
end
else begin
en_div_cnt <= 1'b0; //模块未启动
state <= IDLE; //跳转到IDLE状态,且不使能div_cnt计数器
end
end
GEN_STA:begin //i2c_sclk为高电平时,i2c_sda从高电平变成低电平产生起始位
if(sclk_plus) begin //只有在sclk_plus产生高脉冲的时候,div_cnt计数到最大值
if(cnt == 3) //cnt计数到3,归0
cnt <= 0;
else
cnt <= cnt + 1'b1; //否则计数器自增1
case(cnt) //分四步
0:begin i2c_sdat_o <= 1'b1; i2c_sda_oe <= 1'b1; end //cnt为0时,i2c_sdat_o拉高,三态门输出
1:begin i2c_sclk <= 1'b1; end //cnt为1时,拉高i2c_sclk
2:begin i2c_sdat_o <= 0; i2c_sclk <= 1; end //cnt为2时,继续拉高i2c_sclk,拉低i2c_sdat_o
3:begin i2c_sclk <= 0; end //cnt为3时,拉低i2c_sclk
default: begin i2c_sdat_o <= 1'b1; i2c_sclk <= 1'b1; end
endcase
if(cnt == 3) begin
if(cmd & WR)
state <= WR_DATA; //跳转到写数据状态
else if(cmd & RD)
state <= RD_DATA; //跳转到读数据状态
end
end
end
WR_DATA:begin //写数据时,只有在sclk为低电平的时候,sda才可以变化
if(sclk_plus) begin //8位数据,每位数据分4步,故cnt计数器计数到31
if(cnt == 31)
cnt <= 0;
else
cnt <= cnt + 1'b1;
case(cnt)
0,4,8,12,16,20,24,28:
begin
i2c_sdat_o <= Tx_Data[7-cnt[4:2]]; //在GNE_STA状态时,i2c_sclk拉低了,所以此时把Tx_data一位传给i2s_sdat_o
i2c_sda_oe <= 1'b1; //三态门输出使能
end
1,5,9,13,17,21,25,29:
begin
i2c_sclk <= 1'b1; //sclk posedge 拉高i2c_sclk
end
2,6,10,14,18,22,26,30:
begin
i2c_sclk <= 1'b1; //sclk keep high 继续拉高i2c_sclk
end
3,7,11,15,19,23,27,31:
begin
i2c_sclk <= 1'b0; //sclk negedge 拉低i2c_sclk,以便在下次传输Tx_Data的一位
end
default: begin i2c_sdat_o <= 1; i2c_sclk <= 1; end
endcase
if(cnt == 31) begin
state <= CHECK_ACK; //Tx_Data的8位写完之后,跳转到检查应答位状态
end
end
end
CHECK_ACK:begin
if(sclk_plus) begin
if(cnt == 3)
cnt <= 0;
else
cnt <= cnt + 1;
case(cnt) //应答位的检查依然分四步完成,使用计数器cnt来控制
0: begin i2c_sda_oe <= 1'b0; i2c_sclk <= 1'b0; end //拉低i2c_sclk信号,并且设置三态门为输入
1: begin i2c_sclk <= 1; end //拉高i2c_sclk
2: begin ack_o <= i2c_sdat; i2c_sclk <= 1; end //拉高i2c_sclk,并且把i2c_sdat赋值给ack_o,
3: begin i2c_sclk <= 0; end //拉低i2c_sclk
default: begin i2c_sdat_o <= 1'b1; i2c_sclk <= 1'b1; end //上面连续两次拉高i2c_sclk是为了占空比为50%的i2c_sclk时钟
endcase
if(cnt == 3) begin
if(cmd & STO)
state <= GNE_STO; //跳转到产生停止位状态
else begin
state <= IDLE;
Trans_Done <= 1'b1; //一次传输完成
end
end
end
end
GNE_STO : begin //在i2c_sclk为高电平,i2c_sda从低到高则为停止信号
if(sclk_plus) begin //与产生起始信号类似
if(cnt == 3)
cnt <= 0;
else
cnt <= cnt + 1'b1;
case(cnt)
0: begin i2c_sdat_o <= 1'b0; i2c_sda_oe <= 1'b1; end //三态门输出, i2c_sda拉低
1: begin i2c_sclk <= 1'b1; end //拉高i2c_sclk
2: begin i2c_sdat_o <= 1'b1; i2c_sclk <= 1'b1; end //拉高i2c_sda,i2c_sclk
3: begin i2c_sclk <= 1'b1; end
default: begin i2c_sdat_o <= 1'b1; i2c_sclk <= 1'b1; end
endcase
if(cnt == 3) begin
Trans_Done <= 1'b1; //传输完成
state <= IDLE;
end
end
end
RD_DATA: begin //取数据
if(sclk_plus) begin
if(cnt == 31)
cnt <= 0;
else
cnt <= cnt + 1'b1; //8位,每位分4步完成
case(cnt)
0,4,8,12,16,20,24,28:
begin
i2c_sda_oe <= 1'b0;
i2c_sclk <= 0; //set data,拉低i2c_sclk,三态门设置为输入
end
1,5,9,13,17,21,25,29:
begin
i2c_sclk <= 1'b1; //sclk posedge, 拉高i2c_scclk
end
2,6,10,14,18,22,26,30:
begin
i2c_sclk <= 1'b1; //sclk keep high 利用移位的方法来存储,技巧需掌握
Rx_Data <= {Rx_Data[6:0], i2c_sdat};
end
3,7,11,15,19,23,27,31: //sclk negedge
begin
i2c_sclk <= 1'b0;
end
default: begin i2c_sdat_o <= 1; i2c_sclk <= 1; end
endcase
if(cnt == 31) begin
state <= GEN_ACK;
end
end
end
GEN_ACK: begin //产生应答信号
if(sclk_plus) begin //分四步完成
if(cnt == 3)
cnt <= 0;
else
cnt <= cnt + 1'b1;
case(cnt)
0: begin
i2c_sda_oe <= 1'b1; //三态门输出
i2c_sclk <= 1'b0; //拉低i2c_sclk
if(cmd & ACK) //产生ACK,输出0
i2c_sdat_o <= 1'b0;
else if(cmd & NACK) //产生NOACK,输出1
i2c_sdat_o <= 1'b1;
end
1: begin i2c_sclk <= 1'b1; end
2: begin i2c_sclk <= 1'b1; end
3: begin i2c_sclk <= 1'b0; end
default: begin i2c_sdat_o <= 1; i2c_sclk <= 1; end
endcase
if(cnt == 3) begin
if(cmd & STO)
state <= GNE_STO; //跳转到产生停止位状态
else begin
state <= IDLE;
Trans_Done <= 1'b1; //传输完成
end
end
end
end
default: begin
i2c_sclk <= 1'b1;
Trans_Done <= 1'b0;
i2c_sdat_o <= 1'b0;
i2c_sda_oe <= 1'b1;
cnt <= 0;
end
endcase
end
//在en_div_cnt使能,div_cnt开始奇数,计数大最大值循环计数
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
div_cnt <= 20'd0;
else if(en_div_cnt) begin
if(div_cnt < SCL_CNT_M)
div_cnt <= div_cnt + 1'b1;
else
div_cnt <= 0;
end
else
div_cnt <= 20'd0;
end
assign i2c_sdat = !i2c_sdat_o && i2c_sda_oe ? 1'b0 : 1'bz; //三态门设置
endmodule
测试的tb文件如下所示,分别向0x0A,0x0B,0x0C,0x0D,0X0F,写入1,2,3,4,5。然后再把它们读出来。
`timescale 1ns/1ns
module i2c_bit_shift_tb;
reg Clk;
reg Rst_n;
reg [5:0]Cmd;
reg Go;
wire [7:0]Rx_DATA;
reg [7:0]Tx_DATA;
wire Trans_Done;
wire ack_o;
wire i2c_sclk;
wire i2c_sdat;
pullup PUP (i2c_sdat);
localparam
WR = 6'b000001, // 写请求
STA = 6'b000010, //起始位请求
RD = 6'b000100, //读请求
STO = 6'b001000, //停止位请求
ACK = 6'b010000, //应答位请求
NACK = 6'b100000; //无应答请求
/*
i2c_bit_shift i2c_bit_shift(
.Clk(Clk),
.Rst_n(Rst_n),
.Cmd(Cmd),
.Go(Go),
.Rx_DATA(Rx_DATA),
.Tx_DATA(Tx_DATA),
.Trans_Done(Trans_Done),
.ack_o(ack_o),
.i2c_sclk(i2c_sclk),
.i2c_sdat(i2c_sdat)
);
*/
i2c_bit_shift i2c_bit_shift(
.clk(Clk),
.rst_n(Rst_n),
.cmd(Cmd),
.go(Go),
.Rx_Data(Rx_DATA),
.Tx_Data(Tx_DATA),
.Trans_Done(Trans_Done),
.ack_o(ack_o),
.i2c_sclk(i2c_sclk),
.i2c_sdat(i2c_sdat)
);
M24LC04B M24LC04B(
.A0(0),
.A1(0),
.A2(0),
.WP(0),
.SDA(i2c_sdat),
.SCL(i2c_sclk),
.RESET(~Rst_n)
);
initial Clk = 1;
always #10 Clk = ~Clk;
initial begin
Rst_n = 0;
Cmd = 0;
Go = 0;
Tx_DATA = 0;
#2001;
Rst_n = 1;
#2000;
write_one_byte(8'hA0,8'h0A,8'hd1);
//#20000;
write_one_byte(8'hA0,8'h0B,8'hd2);
//#20000;
write_one_byte(8'hA0,8'h0C,8'hd3);
//#20000;
write_one_byte(8'hA0,8'h0D,8'hd4);
//#20000;
write_one_byte(8'hA0,8'h0F,8'hd5);
//#20000;
read_one_byte(8'hA0,8'h0A);
//#20000;
read_one_byte(8'hA0,8'h0B);
//#20000;
read_one_byte(8'hA0,8'h0C);
//#20000;
read_one_byte(8'hA0,8'h0D);
//#20000;
read_one_byte(8'hA0,8'h0F);
//#20000;
$stop;
end
task write_one_byte;
input [7:0]device_id; //器件地址
input [7:0]mem_address; //寄存器地址
input [7:0]data; //需要写的数据
begin
Cmd = WR | STA; //写入产生起始位和写数据命令
Go = 1; //启动整个模块
Tx_DATA = device_id; //把器件地址赋值给Tx_Data
#20;
Go = 0; //延迟一个时钟周期拉低go信号
#200;
@(posedge Trans_Done); //等待此次传输数据完成
#20;
//#20000;
Cmd = WR; //传入写数据命令
Go = 1; //启动整个模块
Tx_DATA = mem_address; //把寄存器地址赋值给Tx_Data
#20;
Go = 0; //延迟一个时钟周期拉低go信号
#200;
@(posedge Trans_Done); //等待此次数据传输完成
//#20000;
#20
Cmd = WR | STO; //传入写数据和产生停止位的命令
Go = 1; //启动整个模块
Tx_DATA = data; //把需要写入的数据赋值给Tx_Data
#20;
Go = 0; //延迟一个时钟周期拉低go信号
#200;
@(posedge Trans_Done); //等待此次传输数据完成
#20000;
end
endtask
task read_one_byte;
input [7:0]device_id; //传入器件地址
input [7:0]mem_address; //传入寄存器地址
begin
Cmd = WR | STA; //传入写数据和产生开始位的命令
Go = 1; //启动整个模块
Tx_DATA = device_id; //把器件地址赋值给Tx_Data
#20;
Go = 0; //延迟一个时钟周期拉低go信号
#200;
@(posedge Trans_Done); //等待此次传输数据完成
#20000;
Cmd = WR | STO;
Go = 1;
Tx_DATA = mem_address;
#20;
Go = 0;
#200;
@(posedge Trans_Done);
//#20000;
#20;
Cmd = WR | STA;
Go = 1;
Tx_DATA = device_id | 8'd1;
#20;
Go = 0;
#200;
@(posedge Trans_Done);
//#20000;
#20;
Cmd = RD | NACK | STO;
Go = 1;
#20;
Go = 0;
#200;
@(posedge Trans_Done);
//#20000;
#20;
end
endtask
endmodule
仿真波形如下所示,可知成功读出了数据:
I2C 控制模块
由于i2c_bit_shift模块只可以发送一个字节的数据,而一次写输入或者时读输出需要写入好几个字节。因此可以为写输入和输入分别分配若干个写字节的任务,两者均是从IDLE状态开始。但是这些任务时是顺序的,必须等待前一个任务完成,此时我们的Trans_done信号就派上用场了。故可以使用状态机来设计。
对于一次写:
对于一次读:
有如下的状态(采取独热码编码):
| IDLE | 空闲状态 |
|---|---|
| WR_REG | 写状态 |
| WAIT_WR_DONE | 等待写完成状态 |
| WR_REG_DONE | 写完成状态 |
| RD_REG | 读状态 |
| WAIT_RD_DONE | 等待读完成状态 |
| RD_REG_DONE | 读完成状态 |
状态转换图:
控制模块的代码如下(代码中有很详细的注释),便不多解释
module i2c_ctrl(
input wire clk , //时钟信号
input wire rst_n , //复位信号
input wire wrreg_req , //写请求信号
input wire rdreg_req , //读请求信号
input wire [15:0] addr , //16位地址输入
input wire addr_mode , //输入地址的模式,0:8位的地址 1:16位的地址
input wire [7:0] wrdata , //总线发送的8位数据
output reg [7:0] rddata , //总线接收的8位数据
input wire [7:0] device_id , //i2c器件的ID
output reg RW_Done , //读/写完成的标志
output reg ack , //从机是否应答标志
output wire i2c_sclk , //i2c时钟总线
inout wire i2c_sdat
);
localparam IDLE = 7'b0000_001, //空闲状态
WR_REG = 7'b0000_010, //写状态
WAIT_WR_DONE= 7'b0000_100, //等待写完成状态
WR_REG_DONE = 7'b0001_000, //写完成状态
RD_REG = 7'b0010_000, //读状态
WAIT_RD_DONE= 7'b0100_000, //等待读完成状态
RD_REG_DONE = 7'b1000_000; //读完成状态
localparam WR = 6'b000_001, //写数据请求
STA = 6'b000_010, //起始位请求
RD = 6'b000_100, //读数据请求
STO = 6'b001_000, //停止位请求
ACK = 6'b010_000, //应答位请求
NACK = 6'b100_000; //无应答请求
reg [5:0] cmd ;
reg [7:0] Tx_Data ;
reg go ;
reg [6:0] state ;
reg [7:0] cnt ;
//reg [15:0] reg_addr ;
wire Trans_Done ;
wire ack_o ;
wire [7:0] Rx_Data ;
wire [15:0] reg_addr ;
i2c_bit_shift i2c_bit_shift (
.clk (clk) ,
.rst_n (rst_n) ,
.cmd (cmd) ,
.go (go) ,
.Tx_Data (Tx_Data) ,
.i2c_sclk (i2c_sclk) ,
.i2c_sdat (i2c_sdat) ,
.Trans_Done (Trans_Done) ,
.Rx_Data (Rx_Data) ,
.ack_o (ack_o)
);
assign reg_addr = (addr_mode) ? addr : {addr[7:0], addr[15:8]};
always @(posedge clk or negedge rst_n)
if(!rst_n) begin
cmd <= 6'd0;
Tx_Data <= 8'd0;
go <= 1'b0;
rddata <= 8'd0;
state <= IDLE;
ack <= 0;
end
else begin
case(state)
RD_REG: begin //读寄存器状态包括读数据的四个task
state <= WAIT_RD_DONE; //跳转等待读完成状态
case(cnt)
0: write_byte(WR | STA, device_id) ; //产生起始位并写入器件地址
1: write_byte(WR, reg_addr[15:8]) ; //写入寄存器地址的高8位
2: write_byte(WR, reg_addr[7:0]); //写入寄存器地址的低8位
3: write_byte(WR | STA, device_id | 8'd1); //产生起始位并写入器件地址(最后一位是1,表示读)
4: read_byte(RD | NACK | STO); //读数据并且产生NACK,STOP信号
default:;
endcase
end
WAIT_RD_DONE:begin
go <= 1'b0; //拉低go信号
if(Trans_Done) begin //等待此次数据传输完成
if(cnt <= 3)
ack <= ack | ack_o;
case(cnt)
0: begin cnt <= 1; state <= RD_REG; end //cnt为0时,cnt加1,跳转读寄存器状态
1: begin
state <= RD_REG;
if(addr_mode) //根据地址模式
cnt <= 2; //addr_more为1:16位地址
else
cnt <= 3; //addr_mode位0,8位地址
end
2: begin
cnt <= 3;
state <= RD_REG;
end
3: begin
cnt <= 4;
state <= RD_REG;
end
4: state <= RD_REG_DONE; //cnt为4时,跳转到读完成状态
default: state <= IDLE;
endcase
end
end
RD_REG_DONE:begin
RW_Done <= 1'b1; //拉高读写完成信号
rddata <= Rx_Data; //把读出的数据Rx_Data赋值给rddata
state <= IDLE; //跳转到IDLE状态
end
WR_REG: begin
state <= WAIT_WR_DONE; //跳转到等待写完成状态
case(cnt)
0: write_byte(WR | STA, device_id); //产生起始位并写入器件地址
1: write_byte(WR, reg_addr[15:8]); //写入寄存器地址的高8位
2: write_byte(WR, reg_addr[7:0]); //写入寄存器地址的低8位
3: write_byte(WR | STO, wrdata); //写入数据并且产生停止位
default:;
endcase
end
WAIT_WR_DONE:begin
go <= 1'b0; //拉低go信号
if(Trans_Done) begin //等待此次传输数据完成
ack <= ack | ack_o;
case(cnt)
0: begin cnt <= 1; state <= WR_REG; end //cnt为0时,跳转写寄存器状态
1: begin
state <= WR_REG;
if(addr_mode) //不同的地址模式
cnt <= 2; //决定时写入16位还是8位
else
cnt <= 3;
end
2: begin
cnt <= 3;
state <= WR_REG;
end
3: state <= WR_REG_DONE; //cnt为3时,跳转写完成状态
default: state <= IDLE;
endcase
end
end
WR_REG_DONE:begin
RW_Done <= 1'b1; //拉高读写完成信号
state <= IDLE; //跳转到IDLE状态
end
IDLE: begin
cnt <= 0;
ack <= 0;
RW_Done <= 1'b0;
if(wrreg_req) //写请求则进入写寄存器状态
state <= WR_REG;
else if(rdreg_req) //读请求则进入读寄存器状态
state <= RD_REG;
else
state <= IDLE;
end
default: state <= IDLE;
endcase
end
//读一个字节的任务
task read_byte;
input [5:0] ctrl_cmd ; //传入命令
begin
cmd <= ctrl_cmd ; //将传入的命令赋值给cmd
go <= 1'b1 ; //启动整个模块
end
endtask
//写一个字节的任务
task write_byte;
input [5:0] ctrl_cmd ; //传入命令
input [7:0] wr_byte_data ; //传入要写入的8位字节数据
begin
cmd <= ctrl_cmd ; //将传入的命令赋值给cmd
Tx_Data <= wr_byte_data ; //将传入的8位字节数据赋值给Tx_Data
go <= 1'b1 ; //启动整个模块
end
endtask
endmodule
仿真的tb文件:
`timescale 1ns/1ns
module i2c_control_tb;
reg Clk;
reg Rst_n;
reg wrreg_req;
reg rdreg_req;
reg [15:0]addr;
reg addr_mode;
reg [7:0]wrdata;
wire [7:0]rddata;
reg [7:0]device_id;
wire RW_Done;
wire ack;
wire i2c_sclk;
wire i2c_sdat;
pullup PUP (i2c_sdat);
i2c_ctrl i2c_control(
.clk(Clk),
.rst_n(Rst_n),
.wrreg_req(wrreg_req),
.rdreg_req(rdreg_req),
.addr(addr),
.addr_mode(addr_mode),
.wrdata(wrdata),
.rddata(rddata),
.device_id(device_id),
.RW_Done(RW_Done),
.ack(ack),
.i2c_sclk(i2c_sclk),
.i2c_sdat(i2c_sdat)
);
/*
i2c_control i2c_control(
.Clk(Clk),
.Rst_n(Rst_n),
.wrreg_req(wrreg_req),
.rdreg_req(rdreg_req),
.addr(addr),
.addr_mode(addr_mode),
.wrdata(wrdata),
.rddata(rddata),
.device_id(device_id),
.RW_Done(RW_Done),
.ack(ack),
.i2c_sclk(i2c_sclk),
.i2c_sdat(i2c_sdat)
);
*/
M24LC64 M24LC64(
.A0(0),
.A1(0),
.A2(0),
.WP(0),
.SDA(i2c_sdat),
.SCL(i2c_sclk),
.RESET(~Rst_n)
);
initial Clk = 1;
always #10 Clk = ~Clk;
initial begin
Rst_n = 0;
rdreg_req = 0;
wrreg_req = 0;
#2001;
Rst_n = 1;
#2000;
write_one_byte(8'hA0,8'h0A,8'hd1);
//#20000;
write_one_byte(8'hA0,8'h0B,8'hd2);
//#20000;
write_one_byte(8'hA0,8'h0C,8'hd3);
//#20000;
write_one_byte(8'hA0,8'h0D,8'hd4);
//#20000;
write_one_byte(8'hA0,8'h0F,8'hd5);
//#20000;
read_one_byte(8'hA0,8'h0A);
//#20000;
read_one_byte(8'hA0,8'h0B);
//#20000;
read_one_byte(8'hA0,8'h0C);
//#20000;
read_one_byte(8'hA0,8'h0D);
//#20000;
read_one_byte(8'hA0,8'h0F);
//#20000;
$stop;
end
task write_one_byte;
input [7:0]id;
input [7:0]mem_address;
input [7:0]data;
begin
addr = {8'd0,mem_address};
device_id = id;
addr_mode = 1;
wrdata = data;
wrreg_req = 1;
#20;
wrreg_req = 0;
@(posedge RW_Done);
#20000;
end
endtask
task read_one_byte;
input [7:0]id;
input [7:0]mem_address;
begin
addr = {8'd0,mem_address};
device_id = id;
addr_mode = 1;
rdreg_req = 1;
#20;
rdreg_req = 0;
@(posedge RW_Done);
#20000;
end
endtask
endmodule
从仿真波形图可以看出,成功的读写了数据。文章来源:https://www.toymoban.com/news/detail-780654.html
 文章来源地址https://www.toymoban.com/news/detail-780654.html
文章来源地址https://www.toymoban.com/news/detail-780654.html
到了这里,关于verilog实现I2C控制器 (小梅哥思路)----详细解析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!