一、激光雷达建图
- 小车开机,连接WIFI,密码:dongguan。
- 启动激光建图(服务端)
ssh -Y wheeltec@192.168.0.100
roslaunch turn_on_wheeltec_robot mapping.launch

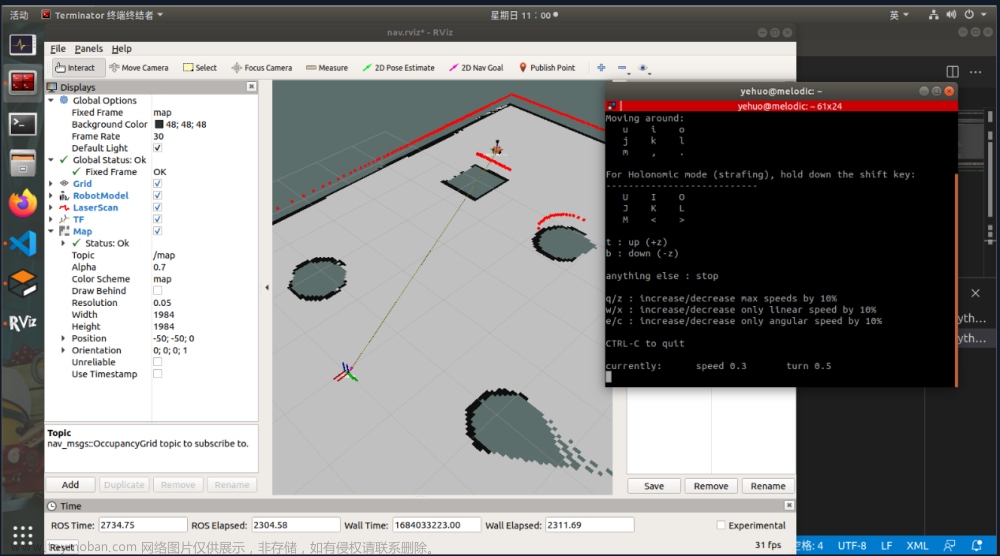
- 查看建图效果(客户端)
rviz
可以使用键盘控制、APP遥控、PS2遥控、航模遥控进行控制小车运动。

- 建图完成,保存地图 (服务端)
保存方法1:
# 一键保存
roslaunch turn_on_wheeltec_robot map_saver.launch

保存方法2:
# 打开地图路径
cd /home/wheeltec/wheeltec_robot/src/turn_on_wheeltec_robot/map
# 保存地图
rosrun map_server map_saver -f 地图名
- 文件挂载,查看地图
# 文件挂载
sudo mount -t nfs 192.168.0.100:/home/wheeltec/wheeltec_robot /mnt

注:地图文件可以使用PhotoShop进行编辑
建图
mapping.launch
小车初始化节点:turn_on_wheeltec_robot.launch
雷达节点:rplidar.launch
gmapping建图节点:algorithm_gmapping.launch
二、建图算法切换及其优缺点
-
连接小车wifi
-
文件挂载后,建图算法的切换
sudo mount -t nfs 192.168.0.100:/home/wheeltec/wheeltec_robot /mnt
mapping.launch 修改mapping_model 的default值
- 并进行SSH登录, 并启动建图算法。
ssh -Y wheeltec@192.168.0.100
-
gmapping
目前比较常用的建图算法。构建大地图时所需内存和计算量都会增加,因此
不适合构建大场景地图。因为没有回环检测,所以在回环闭合时可能会造成地图错位。
-
hector
不需要里程计,人抱着小车走也可以建图。效果不如gmapping,适合因条
件限制没有里程计的机器人。
建图时转向速度尽量缓慢,建议0.1rad/s 以下。
-
cartographer
直接订阅odom,不需要robot_pose_ekf。其tf 发布频率200HZ 大于
robot_pose_ekf 的20HZ,robot_pose_ekf 发布的tf 会被覆盖。
-
karto
与gmapping 差不多,更适合用于创建大地图,同时其地图刷新比较慢。
三、自主导航
1.小车开机,连接WIFI,密码:dongguan
2.SSH远程登录:ssh wheeltec@192.168.0.100,密码:dongguan
3.把小车放置在地图起点/rviz手动设置起点
4.运行导航(服务端):roslaunch turn_on_wheeltec_robot navigation.launch
5.运行rviz(客户端):rviz
6.使用rviz的2DNavGoal功能
小车不运动同时没有路径规划显示:检查.bashrc文件ip地址()
额外补充和launch文件讲解
1.地图文件
2.手动发布目标点
rostopic pub /move_base_simple/goal
四元数
x = ax * sin(theta/2)
y = ay * sin(theta/2)
z = 1* sin(180°/2) =1
w = cos(180°/2) =0
3.navigation.launch
整体导航工作原理与参数配置讲解
navigation_stack
四、多点导航
1.小车开机,连接WIFI,密码:dongguan
2.SSH远程登录:ssh wheeltec@192.168.0.100,密码:dongguan
3.把小车放置在地图起点或者rviz手动设置起点
4.运行导航(服务端):roslaunch turn_on_wheeltec_robot navigation.launch
5.运行rviz(客户端):rviz
6.rviz添加path_ponit(MarkerArray数据格式)话题订阅,进行可视化文章来源:https://www.toymoban.com/news/detail-781473.html
7.使用rviz的Publish Point功能文章来源地址https://www.toymoban.com/news/detail-781473.html
到了这里,关于ROS机器人应用(6)—— 激光雷达建图和导航的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!