原题展示







原题分析
本届国赛试题主要包含LCD、LED、按键、EEPROM、串口、模拟电压输入、脉冲输入输出七大部分,其中前面三个部分是蓝桥杯嵌入式的“亲儿子”(必考部分),而剩下的四个部分都为“干儿子”(考频相对较高)。
相对于本届省赛两套试题:
-
本套试题串口数据接收出现一个较为复杂的问题:如何接收PC端发送变长数据?省赛的两套试题PC发送的数据类型与长度都比较单一,要不发送7个字符的新旧密码,要不直接发送一个"?"号,而本套试题PC发送的数据长度不定,要不是1位数据,要不是3位数据, 那么这就涉及到串口接收不定长度数据,至于到底该怎么处理,此处小编先保密。😁😁😁
-
本套试题中还出现了一个较为“新鲜的旧知识点”——LCD显示数据翻转,问题新鲜在于可能屏幕前的你是第一次碰到这个操作,旧知识点是因为很多LCD或LED都可以进行翻转。其实,官方提供的LCD显示代码中提供了反向显示的LCD翻转指令:
0x0100、0xA700,具体使用方法大家可以看下文。😜😜😜 -
本届试题还出现了一个可能困惑大家的地方:SRAM至少记录100条数据。

小编咋一看,还以为是需要将数据存储在一个掉电也不会丢失的内存中呢。(小编忘记ROM与RAM的区别啦😅😅😅)百度后才知道:SRAM,一种静态随机存取存储器存储器只要保持通电,里面储存的数据就可以恒常保持;掉电后,数据还是会消失,这与在断电后还能储存资料的ROM或闪存是不同的。所以,也就是说,将这100条以上的数据存储到数据中就好啦!🤔🤔🤔 -
本届试题中的模拟电压输入也值得关注,因为本届赛题考察的是ADC多通道采集,而并非十一届赛题那种单通道采集。
-
至于脉冲输入输出,主要还是定时器配置与使用,只要定时器配置与使用熟练掌握并且合理运用,脉冲输入输出问题不大。
详细题解
在正式题解前,大家需要注意以下几点:
- 由于LCD与LED有部分引脚是共用的,因此初始化完成LCD后最好手动关闭LED或者保存上一次LED的引脚的值;
- 由于每次LCD显示的长度可能不同,因此在本次显示前,要不先清屏,要不跟上次显示一样长;
- 使用CubeMX配置完成串口USART1后需要更改默认引脚为PA9、PA10;
LED模块
通过查询产品手册知,LED的引脚为PC8~PC15,外加锁存器74HC573需要用到的引脚PD2。(由于题目要求除LED1、LED2、LED3、LED4外的其他LED都处于熄灭状态,此处特意将所有的LED都初始化以便于管理其他的LED灯)
CubeMX配置:
代码样例
由于G431的所有LED都跟锁存器74HC573连接,因此每次更改LED状态时都需要先打开锁存器,写入数据后再关闭锁存器。
/*****************************************************
* 函数功能:改变所有LED的状态
* 函数参数:
* char LEDSTATE: 0-表示关闭 1-表示打开
* 函数返回值:无
******************************************************/
void changeAllLedByStateNumber(char LEDSTATE)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12,(LEDSTATE==1?GPIO_PIN_RESET:GPIO_PIN_SET));
//打开锁存器 准备写入数据
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
//关闭锁存器 锁存器的作用为 使得锁存器输出端的电平一直维持在一个固定的状态
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
/*****************************************************
* 函数功能:根据LED的位置打开或者是关闭LED
* 函数参数:
* uint16_t LEDLOCATION:需要操作LED的位置
* char LEDSTATE: 0-表示关闭 1-表示打开
* 函数返回值:无
******************************************************/
void changeLedStateByLocation(uint16_t LEDLOCATION,char LEDSTATE)
{
HAL_GPIO_WritePin(GPIOC,LEDLOCATION,(LEDSTATE==1?GPIO_PIN_RESET:GPIO_PIN_SET));
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
试题要求中除了LED3,其他的LED灯要求比较简单,只需要点亮即可;而LED3则需要计时闪烁,每次间隔100ms就需要闪烁,因此,计时最好将其放在定时器中完成。
/**************************************************
* 函数功能:LED工作函数
* 函数参数:
* int mod1:LED3的工作模式
* int mod2:LED4的工作模式
* 函数返回值:无
***************************************************/
void ledPro(int mod1,int mod2)
{
// 倍频
if(keyB4[0]%2 == 0)
changeLedStateByLocation(LED1,1);
else
changeLedStateByLocation(LED1,0);
// 分频
if(keyB4[0]%2 == 1)
changeLedStateByLocation(LED2,1);
else
changeLedStateByLocation(LED2,0);
// 电压
if(mod1%2 == 1)
{
rollbackLedByLocation(LED3);
LED3TimeFlag = 0;
}
else
changeLedStateByLocation(LED3,0);
// LCD正反
if(mod2%2 == 0)
changeLedStateByLocation(LED4,1);
else
changeLedStateByLocation(LED4,0);
}
按键模块
通过查询产品手册知,开发板上的四个按键引脚为PB0~PB2、PA0。
CubeMX配置
代码样例
本次试题涉及到按键单击以及长按短按,因此,按键扫描时就不能单一的按键按下后就返回按键值;而是在按键按下后,还需要记录按键按下时间,以此来判断按键是长按或者是短按。
- 第一步,获取按键当前状态,并且判断按键是否按下,如果按键松开,则不做任何处理;否则,重置按键时间,进入下一步。(这实际上是一个消抖步骤)
- 第二步,再次获取按键状态,判断按键是否按下,如果没有按下,就重置程序状态,返回步骤一;否则,就跳转到步骤三,开始判断按键长短按、单双。;
- 第三步,记录按键按下时间,按键松开后,开始通过按键的时间判断按键类别,如果在时间T1内按键按下了两次,那么就属于按键双击;否则,就为按键单击。如果在时间T2(T2>>T1)内,按键一直处于按下状态,此时就属于按键长按。如果按键不属于这两大类情况,那么按键就无效。
/****************************************************************************************************
* 函数功能:按键扫描函数 注意此函数放在定时器中断(10ms)中的使用效果最佳 否则双击与长按会出现问题
* 函数参数:无
* 函数返回值:无
*****************************************************************************************************/
void scanKeyUseStructAndTime(void)
{
static struct keyState _key[4];
//获取按键的最新状态
_key[0].keyState = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
_key[1].keyState = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
_key[2].keyState = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
_key[3].keyState = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
//处理按键的最新状态
for(int i=0;i<4;i++){
switch (_key[i].judgeSate){
//按键第一次按下
case 0:
if(_key[i].keyState == 0){
//跳转按键的状态
_key[i].judgeSate=1;
//清空按键时间
_key[i].keyTime=0;
}
break;
//按键第二次按下 两次相隔10ms可以起到消抖作用
case 1:
//按键再次按下 跳转按键状态
if(_key[i].keyState == 0)
_key[i].judgeSate=2;
//上一次按键按下是抖动按下 属于无效状态 应该退回最开始的状态
else
_key[i].judgeSate=0;
break;
//确定按键按下后的处理过程
case 2:
//等待松开过程,且非长按键
if((_key[i].keyState==1) && _key[i].keyTime<30){
//可能双击按键的第一次,进入计时
if(_key[i].doubleClickTimerFlag == 0) {
_key[i].doubleClickTimerFlag = 1;
_key[i].doubleClickTime = 0;
}
//在计时范围内又按了一次
else{
key[i].doubleFlag=1;//双击情况
_key[i].doubleClickTimerFlag = 0;
}
_key[i].judgeSate = 0;
}
//松开且是长按键
else if(_key[i].keyState==1 && _key[i].keyTime>=30)
{
_key[i].judgeSate = 0;
key[i].longFlag = 1;
}
//按下 且为长按键
else
_key[i].keyTime++;
break;
}
//按键单次按下
if(_key[i].doubleClickTimerFlag == 1 && _key[i].doubleClickTime >= 25) {
key[i].flag = 1;
_key[i].doubleClickTimerFlag = 0;
}
//按键双击 双击计时
else if(_key[i].doubleClickTimerFlag == 1){
_key[i].doubleClickTime++;
}
}
}
串口
本次试题中,串口功能比较简单,但是接收PC发送过来的数据时需要注意:PC发送不定长的数据。这时就需要按位储存PC发送过来的数据,每次处理完成后就清空历史数据。
CubeMX配置
配置时一定一定记得改引脚!!!
代码样例
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)函数解析:
- UART_HandleTypeDef *huart:串口通道;
- uint8_t *pData:存放数据的buff;
- uint16_t Size:一次接收数据的长度
不过使用时还需要初始化,否则不能够进入中断接收数据;
// 定义变量存储PC发送的数据
char Rxbuff[20],_Rxbuff;
uint16_t count = 0;
/***使用HAL_UART_Receive_IT中断接收数据 每次接收完成数据后就会执行该函数***/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1){
Rxbuff[count++%20] = _Rxbuff;
// 重新使能中断
HAL_UART_Receive_IT(huart,(uint8_t *)&_Rxbuff,sizeof(_Rxbuff));
}
}
这里需要注意,下图中的代码句1与代码句2一定不要交换,不然串口接收的数据集就不会是你想要的。😢😢😢

/***使用HAL_UART_Receive_IT中断接收数据 每次接收完成数据后就会执行该函数***/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1){
// 重新使能中断
if(ucRxbuff[0]=='P' && _ucRxbuff[0]=='A')
ucRxbuff[1] = _ucRxbuff[0];
else if((ucRxbuff[0]=='P' && ucRxbuff[1]=='A') && (_ucRxbuff[0]=='1' || _ucRxbuff[0]=='4' || _ucRxbuff[0]=='5'))
ucRxbuff[2] = _ucRxbuff[0];
else
ucRxbuff[0] = _ucRxbuff[0];
HAL_UART_Receive_IT(huart,(uint8_t *)&_ucRxbuff,sizeof(_ucRxbuff));
}
}
这样,串口数据接收就可以不必每次都接收到数据可能出现的最大值,大大提高了串口数据接收的精确性,但是也降低了串口数据接收的灵活性。
串口数据处理
串口数据处理,是根据PC发送过来的数据进行特殊数据匹配,一旦匹配到合适的数据,就给PC发送数据或者是执行其他的一系列操作。
/**************************************************
* 函数功能:串口数据处理函数
* 函数参数:无
* 函数返回值:无
***************************************************/
void usartPro(void)
{
char usartTemp[10];
// 验证是否收到串口信息以及串口信息长度
// 参数
if(ucRxbuff[0] == 'X')
sprintf(usartTemp,"X:%d\r\n",para[0]);
else if(ucRxbuff[0] == 'Y')
sprintf(usartTemp,"Y:%d\r\n",para[1]);
// 显示切换
else if(ucRxbuff[0] == '#')
setDisplayMod(++LCDMod%2);
// 数据
if(ucRxbuff[0] == 'P')
{
if(strcmp((char*)ucRxbuff,"PA1") == 0)
sprintf(usartTemp,"PA1:%d\r\n",P1));
else if(strcmp((char*)ucRxbuff,"PA4") == 0)
sprintf(usartTemp,"PA4:%.2f\r\n",data[0]);
else if(strcmp((char*)ucRxbuff,"PA5") == 0)
sprintf(usartTemp,"PA5:%.2f\r\n",data[1]);
}
// 是否发送数据
if(usartTemp[0]=='P' || usartTemp[0]=='X' || usartTemp[0]=='Y')
HAL_UART_Transmit(&huart1,(uint8_t*)usartTemp,sizeof(char)*strlen(usartTemp),10);
memset(ucRxbuff,0,sizeof(ucRxbuff));
}
LCD模块
LCD模块官方会提供源码,内含初始化,大家会用即可。如下面是一段将LCD初始化成——文字颜色为白色、背景为黑色的LCD屏:
/******************************************************************************
* 函数功能:LCD初始化
* 函数参数:无
* 函数返回值:无
*******************************************************************************/
void lcdInit(void)
{
//HAL库的初始化
LCD_Init();
//设置LCD的背景色
LCD_Clear(Blue);
//设置LCD字体颜色
LCD_SetTextColor(White);
//设置LCD字体的背景色
LCD_SetBackColor(Black);
}
LCD显示翻转
LCD显示翻转,实质就是改变LCD刷新时数据刷新方向。详细讲解大家可以参考小编的这篇文章【蓝桥杯】讲述蓝桥杯嵌入式开发板的LCD翻转显示。小编在此处就直接给出代码啦:😜😜😜
/***************************************************
* 函数功能:设置LCD显示模式
* 函数参数:
* int mod:显示模式 0-正向显示 1-翻转显示
* 函数返回值:无
***************************************************/
void setDisplayMod(int mod)
{
// 反向显示
if(mod == 1)
{
LCD_WriteReg( R1 ,0x0100 );
LCD_WriteReg( R96,0xA700 );
LCD_Clear(Black);
}
// 反向显示
else
{
LCD_WriteReg( R1 ,0x0000 );
LCD_WriteReg( R96,0x2700 );
LCD_Clear(Black);
}
}
不知道大家在LCD与LED同时显示时,有没有碰到LED显示紊乱,这个是因为LCD与LED共用了部分引脚,每次LCD刷新时都有可能改变这些引脚的值,因此LCD显示会出现紊乱。解决这个现象的方案小编放在这篇文章中辣,大家可以参考玩一玩。😁😁😁【蓝桥杯】解决蓝桥杯嵌入式开发板LCD与LED显示冲突问题解决这个问题的实质就是:先保存本次LED显示的值,再刷新LCD显示,最后恢复LED显示。
模拟电压读取(ADC)
试题中要求时测量PA4和PA5的模拟电压,咋一看是不是都不知道要干啥?😣😣😣可以先去CubeMX里看看这两个引脚的配置项有没有ADC的通道,如果有直接配置使用就完事啦!
CubeMX配置

代码样例
通过CubeMX配置咱可以清楚的知道:本次采集需要使用ADC多通道采集,而不是多ADC单通道采集。
/*******************************************************************
* 函数功能:获取ADC多个通道的值
* 函数参数:
* ADC_HandleTypeDef *hadc:ADC
* double*data:保存ADC的值
* int n:ADC通道的个数
* 函数返回值:无
*******************************************************************/
void getManyADC(ADC_HandleTypeDef *hadc,double*data,int n)
{
int i=0;
for(i=0;i<n;i++)
{
HAL_ADC_Start(hadc);
//等待转换完成,第二个参数表示超时时间,单位ms
HAL_ADC_PollForConversion (hadc,50);
data[i] = ((double)HAL_ADC_GetValue(hadc)/4096)*3.3;
}
HAL_ADC_Stop(hadc);
}
调用函数getManyADC()来获取一个ADC两个通道的值,并且存储到指定的结构体中。
/**************************************************
* 函数功能:电压读取函数
* 函数参数:无
* 函数返回值:无
***************************************************/
void elePro(void)
{
int i=0;
// 获取ADC数据
getManyADC(&hadc2,data,2);
// 将获取到的ADC数据储存到数组中
while(i < 2)
{
if(data[i] > paText[i].a)
paText[i].a = data[i];
if(data[i] < paText[i].t || paText[i].n==0)
paText[i].t = data[i];
paText[i].data[paText[i].n++%100] = data[i];
paText[i].h = (paText[i].h*(paText[i].n-1)+data[i])*1.0/paText[i].n;
i++;
}
}
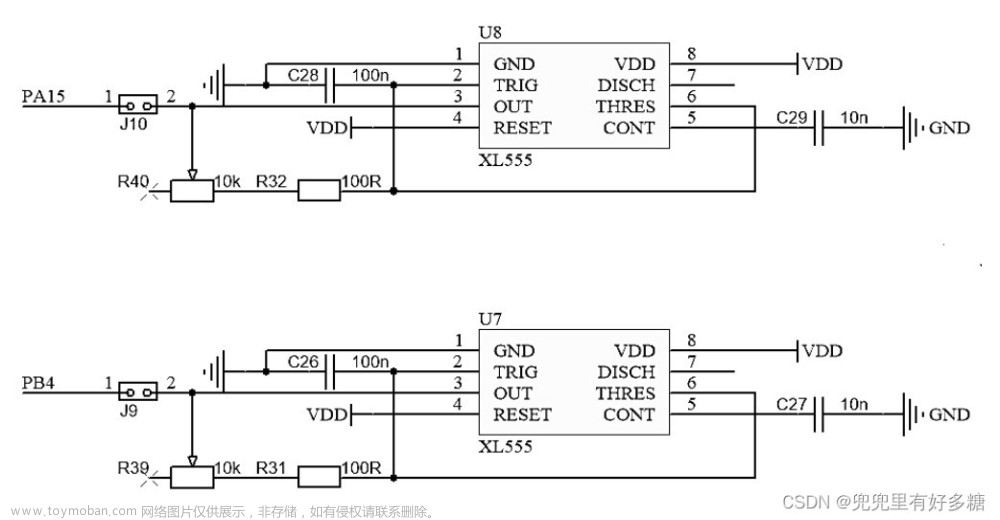
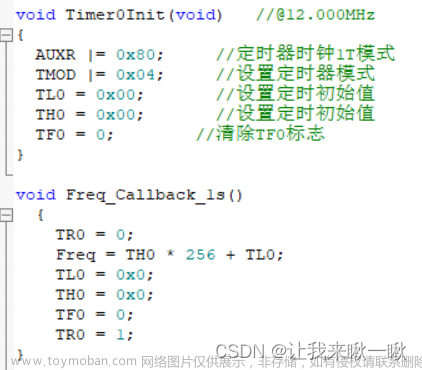
脉冲输入输出
脉冲输入
脉冲输入,采用定时器的输入捕获功能。
CubeMX配置

代码样例
脉冲输入,是通过定时器的输入捕获功能捕获一定时间内的上升沿或者是下降沿的个数,以此来测量输入的频率。详细讲解大家可以参考小编的这篇文章当我们身边没有示波器就无法测量频率与占空比了?一招教你解决身边没有示波器时如何测量STM32定时器产生PWM的频率与占空比
//输入捕获回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
uint32_t temp = 0;
//发生中断的定时器为定时器2通道2
if(htim->Instance == TIM2 && htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
//读取定时器的计数值
temp = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2);
//将定时器的计数值设置成0
__HAL_TIM_SetCounter(htim,0);
//频率<100时 钳制在100
if(P1 < 100)
P1 = 100;
//频率>10k时 钳制在10k
else if(P1 > 10000)
P1 = 10000;
//重新开启定时器
HAL_TIM_IC_Start_IT(htim,TIM_CHANNEL_2);
}
}
脉冲输出
此处的脉冲输出可以理解为PWM输出。
CubeMX配置
代码样例
由于配置完成定时器的PWM输出后,定时器可以周期性工作,因此们可以不用显示调用。题目中要求脉冲输出能够完成分频与倍频操作,也只需要修改定时器的重装载值来完成,具体代码可见下述:
/**************************************************
* 函数功能:频率工作函数
* 函数参数:
* int mod: mod=0为倍频 mod=1为分频
* 函数返回值:无
***************************************************/
void FrePro(int mod)
{
int frd = 0;
// 倍频 keyB4[0]%2
if(mod == 0)
frd = (int)(P1/para[0]-1);
// 分频
else
frd = (int)(P1*para[0]-1);
//设置频率
__HAL_TIM_SetAutoreload(&htim17,frd);
HAL_TIM_GenerateEvent(&htim17, TIM_EVENTSOURCE_UPDATE);
}
文章福利
下边是小编个人整理出来免费的蓝桥杯嵌入式福利,有需要的童鞋可以自取哟!🤤🤤🤤文章来源:https://www.toymoban.com/news/detail-781508.html
- 【蓝桥杯嵌入式】第十一届蓝桥杯嵌入式省赛(第二场)程序设计试题及其题解
- 【蓝桥杯嵌入式】第十二届蓝桥杯嵌入式省赛程序设计试题以及详细题解
- 【蓝桥杯嵌入式】第十三届蓝桥杯嵌入式省赛程序设计试题及其详细题解
- 【蓝桥杯嵌入式】第十三届蓝桥杯嵌入式省赛(第二场)程序设计试题及其题解
- 【蓝桥杯】一文解决蓝桥杯嵌入式开发板(STM32G431RBT6)LCD与LED显示冲突问题,并讲述LCD翻转显示
也欢迎大家留言或私信交流,共同进步哟!😉😉😉文章来源地址https://www.toymoban.com/news/detail-781508.html
到了这里,关于【蓝桥杯嵌入式】第十三届蓝桥杯嵌入式国赛程序设计试题以及详细题解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式省赛[第一场]程序设计题以及详细题解](https://imgs.yssmx.com/Uploads/2024/01/416649-1.png)
![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式[模拟赛2]程序设计试题及详细题解](https://imgs.yssmx.com/Uploads/2024/01/412133-1.png)
![【蓝桥杯嵌入式】第十四届蓝桥杯嵌入式[模拟赛1]程序设计试题及详细题解](https://imgs.yssmx.com/Uploads/2024/01/412432-1.png)
![[蓝桥杯嵌入式]STM32G431——第十二届第一场省赛停车计费系统真题及程序设计代码详解](https://imgs.yssmx.com/Uploads/2024/01/799528-1.jpeg)