CubeMx中HAL库函数的调用不同于库函数调用,在学习CubeMx串口通信时,不理解HAL库中的回调函数是怎么被调用的,于是查看每个的定义,参考其他人写的博客,总算弄明白了HAL库中断调用与库函数不同之处。写下这篇博客一是加深自己的理解,二是希望对不理解HAL库中回调函数调用机制的朋友有所帮助。
工程代码参考:【STM32】-CubeMX-HAL库-UART-串口通信-STM32F103C8T6-收发测试
在库函数中,UART串口发生中断时,我们直接将业务代码写在void USART1_IRQHandler(void)中,如下图:
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
对于CubeMX生成的代码,USART1_IRQHandler(void)函数为了提高中断效率采用了回调机制。(业务代码可以等中断关闭了再去处理,这样中断处理不会占用太多时间影响程序的执行效率)
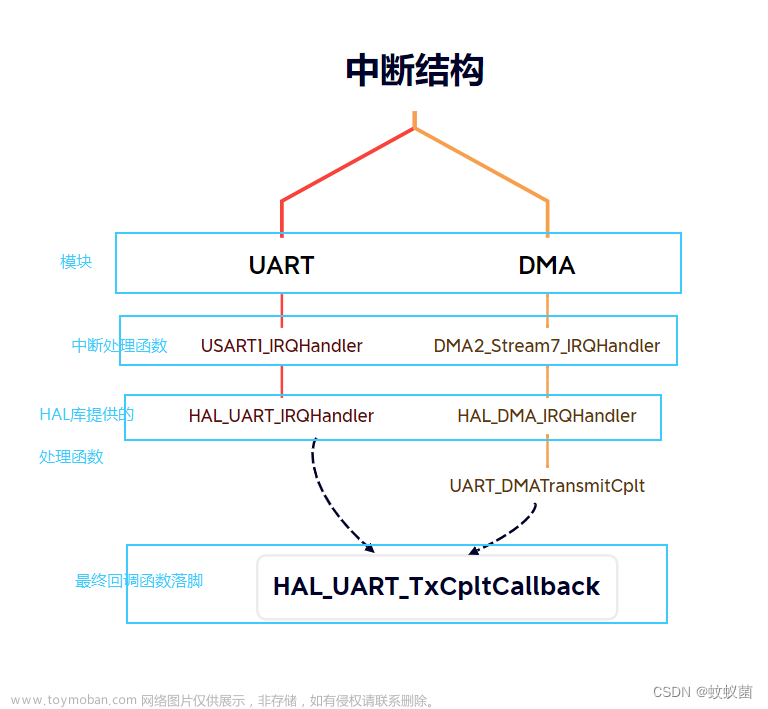
USART1_IRQHandler(void)函数中只调用了HAL_UART_IRQHandler(&huart1)(可以在STM32f1xx_it.c中找到),参数为uart1的句柄huart1,句柄可以理解为通过huart1访问到uart1的各种寄存器和数据类型,不理解的话,可以去看UART_HandleTypeDef结构体的定义。文章来源:https://www.toymoban.com/news/detail-781510.html
在HAL_UART_IRQHandler(UART_HandleTypeDef *huart)函数内又调用了UART_Receive_IT(huart);(回调函数在这个函数中被调用)看注释理解该函数的作用文章来源地址https://www.toymoban.com/news/detail-781510.html
static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart)
{
//用这个指针指向我们用于接收数据的变量或数组,在收发测试例程中定义的是char Res
uint8_t *pdata8bits;
uint16_t *pdata16bits;
/* Check that a Rx process is ongoing */
if (huart->RxState == HAL_UART_STATE_BUSY_RX)
{
if ((huart->Init.WordLength == UART_WORDLENGTH_9B) && (huart->Init.Parity == UART_PARITY_NONE))
{
pdata8bits = NULL;
pdata16bits = (uint16_t *) huart->pRxBuffPtr;//指向Res,相当于pdata16bits=&Res
//具体原因参考HAL_UART_Receive_IT(&huart1, &Res, 1);
*pdata16bits = (uint16_t)(huart->Instance->DR & (uint16_t)0x01FF);
huart->pRxBuffPtr += 2U;
}
else
{
pdata8bits = (uint8_t *) huart->pRxBuffPtr;//指向Res,相当于pdata8bits=&Res
pdata16bits = NULL;
if ((huart->Init.WordLength == UART_WORDLENGTH_9B) || ((huart->Init.WordLength == UART_WORDLENGTH_8B) && (huart->Init.Parity == UART_PARITY_NONE)))
{
//指针操作 相当于Res= (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);
*pdata8bits = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);
}
else
{
//指针操作 相当于Res= (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);
*pdata8bits = (uint8_t)(huart->Instance->DR & (uint8_t)0x007F);
}
huart->pRxBuffPtr += 1U;
}
if (--huart->RxXferCount == 0U)//关闭中断,准备回调,对串口接收到的数据保存
{
/* Disable the UART Data Register not empty Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE);
/* Disable the UART Parity Error Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_PE);
/* Disable the UART Error Interrupt: (Frame error, noise error, overrun error) */
__HAL_UART_DISABLE_IT(huart, UART_IT_ERR);
/* Rx process is completed, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
/* Check current reception Mode :
If Reception till IDLE event has been selected : */
if (huart->ReceptionType == HAL_UART_RECEPTION_TOIDLE)
{
/* Set reception type to Standard */
huart->ReceptionType = HAL_UART_RECEPTION_STANDARD;
/* Disable IDLE interrupt */
CLEAR_BIT(huart->Instance->CR1, USART_CR1_IDLEIE);
/* Check if IDLE flag is set */
if (__HAL_UART_GET_FLAG(huart, UART_FLAG_IDLE))
{
/* Clear IDLE flag in ISR */
__HAL_UART_CLEAR_IDLEFLAG(huart);
}
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx Event callback*/
huart->RxEventCallback(huart, huart->RxXferSize);
#else
/*Call legacy weak Rx Event callback*/
HAL_UARTEx_RxEventCallback(huart, huart->RxXferSize);
#endif
}
else
{
/* Standard reception API called */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx complete callback*/
huart->RxCpltCallback(huart);
#else
/*Call legacy weak Rx complete callback*/
HAL_UART_RxCpltCallback(huart);//正常情况下会执行这一条语句
//我们可以自己定义这个函数内部的具体操作
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
return HAL_OK;
}
return HAL_OK;
}
else
{
return HAL_BUSY;
}
}表格中左右两边的操作为什么等价呢?
| pdata8bits = (uint8_t *) huart->pRxBuffPtr; | pdata8bits=&Res |
| *pdata8bits = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF); | Res= (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF); |
可以从UART_Start_Receive_IT函数中找到答案
(UART_Start_Receive_IT被main函数中的HAL_UART_Receive_IT调用)
//函数参数相当于(&huart1, &Res, 1)
HAL_StatusTypeDef UART_Start_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
{
//函数参数相当于(&huart1, &Res, 1)
huart->pRxBuffPtr = pData;//pData==&Res
//在UART_Receive_IT函数中 pdata8bits = (uint8_t *) huart->pRxBuffPtr;
//pdata8bits=&Res,其他都是同理,如果不理解,需要回顾一下指针操作。
huart->RxXferSize = Size;//Size==1
huart->RxXferCount = Size;
huart->ErrorCode = HAL_UART_ERROR_NONE;
huart->RxState = HAL_UART_STATE_BUSY_RX;
/* Process Unlocked */
__HAL_UNLOCK(huart);
/* Enable the UART Parity Error Interrupt */
__HAL_UART_ENABLE_IT(huart, UART_IT_PE);
/* Enable the UART Error Interrupt: (Frame error, noise error, overrun error) */
__HAL_UART_ENABLE_IT(huart, UART_IT_ERR);
/* Enable the UART Data Register not empty Interrupt */
__HAL_UART_ENABLE_IT(huart, UART_IT_RXNE);
return HAL_OK;
}
回调函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)//自定义回调函数 在UART_Receive_IT()中调用
{
//判断是哪个串口触发的中断 huart1.Instance = USART1;定义在MX_USART1_UART_Init中
if(huart==&huart1)//huart ->Instance == USART1两种判断条件等价
{
if((UART1_RX_STA & 0x8000)==0)//接收未完成&位运算符 &&短路与判断
{
if(UART1_RX_STA & 0x4000)//接收到 \r
{
if(Res==0x0a)//下一个必须是接收 \n
UART1_RX_STA|=0x8000;
else
UART1_RX_STA=0;
}
else //未接收到\r
{
if(Res==0x0d)//Receive \r
{
UART1_RX_STA|=0x4000;
}
else
{
UART1_RX_Buffer[UART1_RX_STA&0X3FFF]=Res;
UART1_RX_STA++;
if(UART1_RX_STA>UART1_REC_LEN-1) UART1_RX_STA=0;//如果接收数据大于200Byte 重新开始接收
}
}
}
HAL_UART_Receive_IT(&huart1, &Res, 1);//完成一次接受,再此开启中断
}
}如果我们自己没有定义回调函数的话,系统会调用自带的回调函数,函数类型为__weak,表示弱定义
如果用户自己定义了函数就优先调用用户定义的回调函数
__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function should not be modified, when the callback is needed,
the HAL_UART_RxCpltCallback could be implemented in the user file
*/
}如果对你有帮助,请点个赞再走,Respect!
到了这里,关于STM32CubeMX-HAL库-UART串口接收中断回调函数代码分析的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!