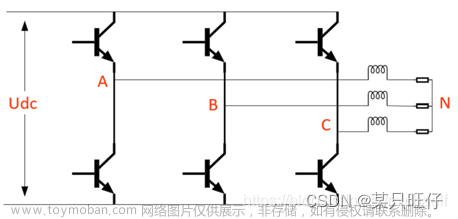
1.永磁同步电机的结构:
轭部、齿、槽:定子或者转子上有铁心或者绕铜线的地方,绕铜线的地方叫槽,而将槽分开的叫齿,将所有的齿连起来的部位较轭部(定子冲片槽底与外圆之间形成的区域)。
每极每相槽数:q=Z/(2*Np*m) Np为极对数,2Np为级数,Np极对数,对应绕组的两个线圈边。
若q比较大,采用双层短距绕组,(绕组跨距小于一个极距)。
极距:槽数/极数;
短距和分布绕组如何实现削弱高次谐波?
分布式绕组:将原本集中布置的绕组错槽分开布置,从而实现高次谐波的减低;

上图中将一个线圈拆分为三个线圈组,分别放到六个槽中,这样每个线圈就会产生各自的磁动势,而且各自的磁动势之间还会存在相位差,磁动势叠加生成的空间合成磁动势将实现谐波抵消。分布绕组对不同谐波的削弱程度不同。
定子槽型:


梨形槽具有的半圆槽底可以使绝缘纸与半圆槽底很好的贴合,从而提高槽满率,不过当前电动汽车采用的扁铜线,为提高槽满率,采用矩形槽更多;
由于在电机运行过程中转矩脉动、电磁径向力会导致电机振动,定子齿部过窄会导致定子齿部机械强度过差,从而导致定子齿部断折。
在电机定子槽型结构设计中,应使得电机定子磁路磁阻最优化,定子磁路不存在磁密奇点,永磁体工作点在电机运行工况范围内位于最优工作点附近。同时,定子槽型选择,应利于电机嵌线,方便电机批量化生产。
槽的深浅:一方面是看磁场从齿的部分走的面积还有鄂部的面积比例近似相当,这样保证磁场的路径从齿到鄂部的阻力一样,另外一个角度看,槽太深了会让齿的径向长度增加,从而降低了定子的圆周方向的刚度,会降低NVH性能,增加振动响应。
线型:高速和更高开关频率的代价就是电机定子铜线有高频肌肤效应,会显著的增加发热损失,有时候会比中速增加1/4损失,那么越高速,浪费的电能越多。解决方案就是在铜线总面积基本不变的基础上用很多细的线,或者是径向很扁的扁铜线来降低肌肤效应的损耗影响。
定子槽开口宽度:

闭口槽磁密小;定子槽开口越大,气隙谐波磁密提高; 气隙磁场的高次谐波在转子感应出涡流,从而产生涡流损耗;
槽口宽度的存在使得定子与永磁体磁场之间的有效气隙发生极大变化,进而使气隙磁导发生剧烈变化,影响永磁同步电机的漏电感,使气隙磁密表现出锯齿状波形,从而产生齿槽转矩,使得电机在运行的过程中,产生转矩脉动及噪音,影响了新能源汽车的乘坐舒适性。
利用电磁仿真软件对电机槽口宽度进行参数化扫描。随着定子槽开口宽度增加,电机等效气隙长度增加,绕组漏电感减小,电机气隙磁密减小,电机凸极率减小,磁阻转矩利用率降低,弱磁效果降低,电机转矩密度降低。但是定子槽开口宽度过小,电机绕组嵌线困难,在不影响电机嵌线的基础上适当减小定子槽开口宽度,有利于电机功率密度的提高。另外,合理选择电机定子槽开口宽度,能够在一定程度上,减小电机齿槽转矩,降低电机震动与噪声。
气隙长度提高,将导致Lq减小,从而减小了磁阻转矩,而Ld由于气隙较大,因此受影响较小。


直轴电感足够大的情况下,电机弱磁扩速能力越好。
电流密度:电流密度矢量是描述电路中某点电流强弱和流动方向的物理量。其大小等于单位时间内通过某一单位面积的电量,方向向量为单位面积相应截面的法向量,指向由正电荷通过此截面的指向确定。
转子外圆开槽或者不等气隙的设计:

通过优化转子外圆形状,实现气隙磁密的正弦性,一般是为了针对性降低气隙磁密某些阶次谐波,提升电机NVH性能的。
硅钢牌号表示方法:DW+铁损值(在频率为50HZ,波形为正弦的磁感峰值为1.5T的单位重量铁损值。)的100倍+厚度值的100倍。 如DW470-50 表示铁损值为4.7w/kg,厚度为0.5mm的冷轧无取向硅钢,现新型号表示为50W470。
钕铁硼永磁材料:最高工作温度在180摄氏度左右。如果是恶劣环境应用,一般推荐不超过140摄氏度。钕铁硼非常容易被腐蚀。因此,成品大多要进行电镀或者涂装。


采用的永磁材料矫顽力越大,抗退磁能力越强;

磁材牌号的分类是安装内禀矫顽力进行区分的。
2.查漏补缺
梯度算子,也称为哈密顿算子;用来计算散度和旋度;表示向量微分算符。

渗碳钢:常用作转轴材料,零件表面渗碳1mm左右。
刚度:指物体抵抗变形的能力。文章来源:https://www.toymoban.com/news/detail-781994.html
胡克定律,曾译为虎克定律,是力学弹性理论中的一条基本定律,表述为:固体材料受力之后,材料中的应力与应变(单位变形量)之间成线性关系。文章来源地址https://www.toymoban.com/news/detail-781994.html
到了这里,关于永磁同步电机--结构的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!