功能描述
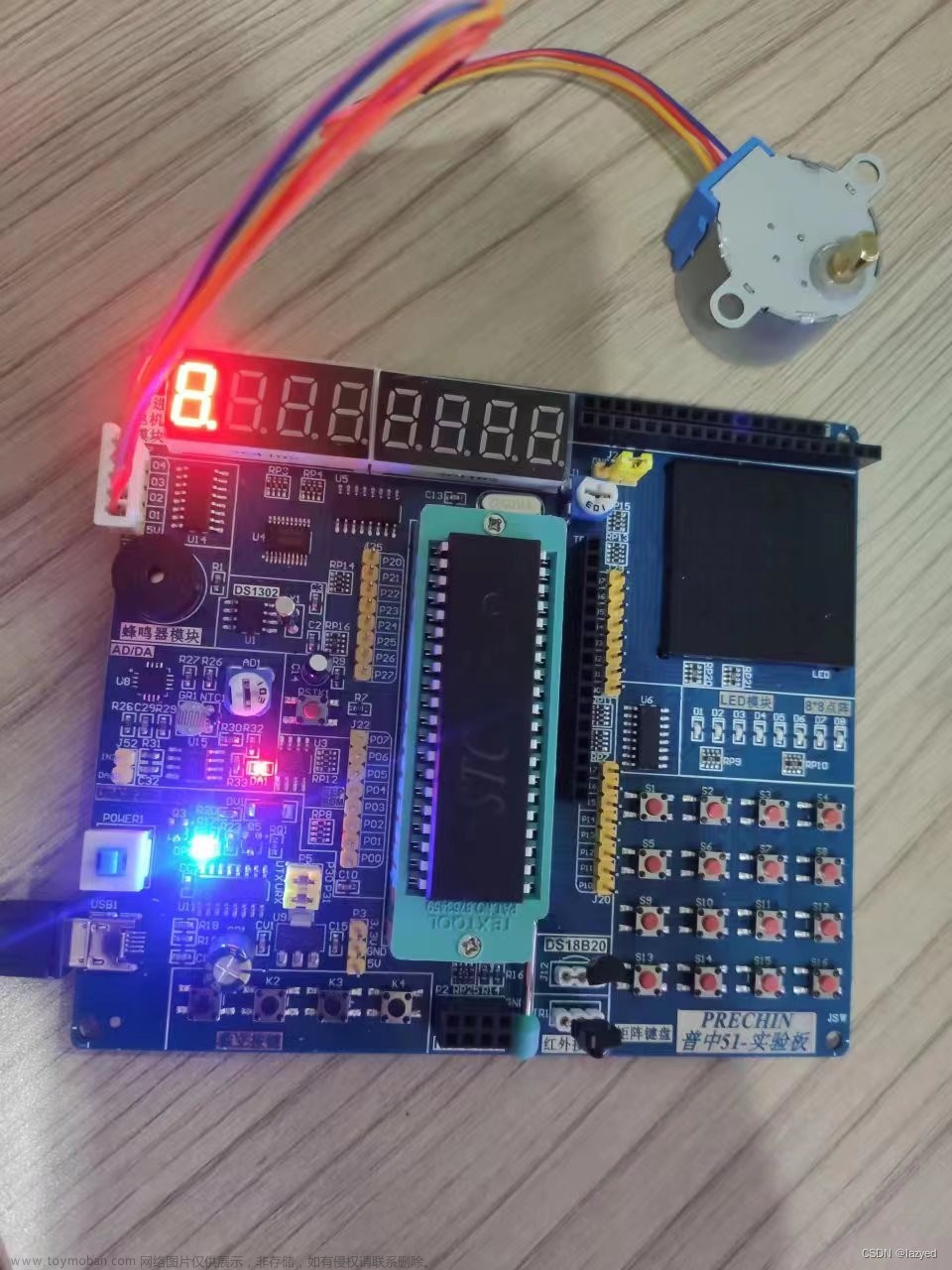
1、采用51/52单片机作为主控芯片;
2、采用DC-5V步进减速电机(步进角度5.625°,减速比1/64);
3、采用ULN2003作为电机驱动;
4、采用一位数码管显示当前转速(10档);
5、按键控制正转、反转、加速、减速、停止;
6、LED指示正反转状态、监看驱动信号;
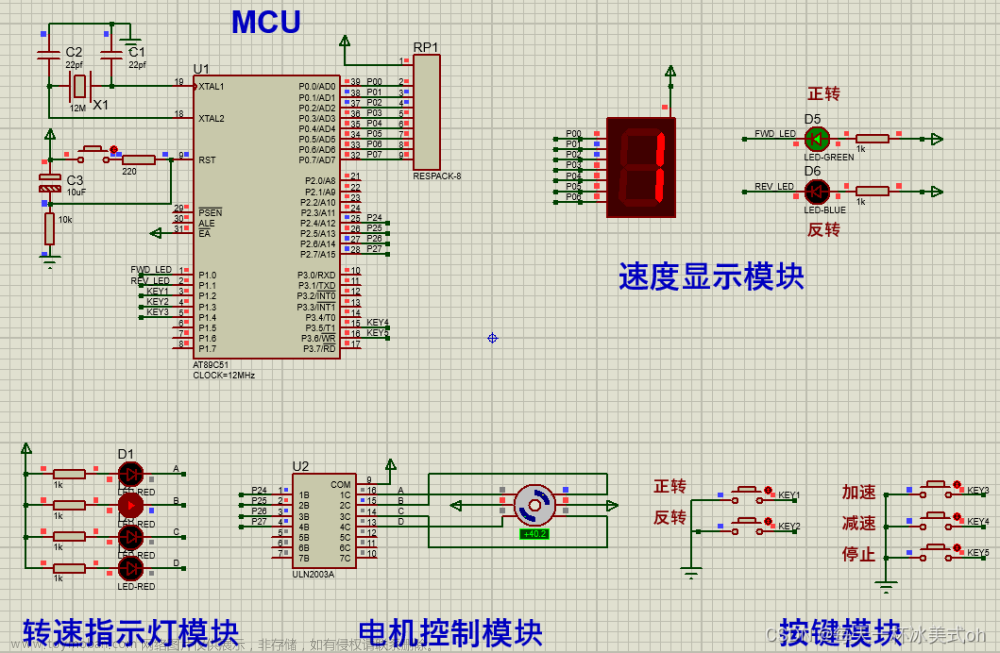
电路设计
采用Altium Designer作为电路设计工具。Altium Designer通过把原理图设计、PCB绘制编辑、拓扑逻辑自动布线、信号完整性分析和设计输出等技术的完美融合,为设计者提供了全新的设计解决方案,使设计者可以轻松进行设计,熟练使用这一软件必将使电路设计的质量和效率大大提高。

单片机管脚说明:
P0端口(P0.0-P0.7):P0口为一个8位漏极开路双向I/O口,每个引脚可吸收8TTL门电流。当P1口的管脚第一次写1时,被定义为高阻输入。P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1端口(P1.0-P1.7):P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL门电流。P1口管脚写入1后,被内部上拉为高电平,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。在FLASH编程和校验时,P1口作为第八位地址接收。
P2端口(P2.0-P2.7):P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。并因此作为输入时,P2口的管脚被外部拉低,将输出电流。这是由于内部上拉的缘故。P2口,用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3端口(P3.0-P3.7):P3口管脚是一个带有内部上拉电阻的8位的双向I/O端口,可接收输出4个TTL门电流。当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。作为输入端时,由于外部下拉为低电平,P3口将输出电流(ILL)。P3口同时为闪烁编程和编程校验接收一些控制信号。
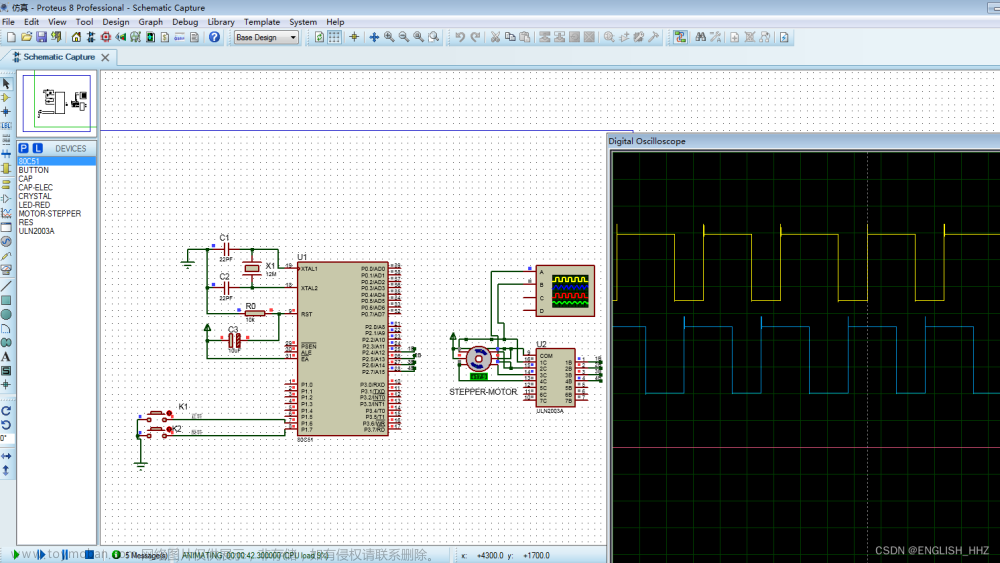
仿真设计
采用Proteus作为仿真设计工具。Proteus是一款著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。
 文章来源:https://www.toymoban.com/news/detail-782035.html
文章来源:https://www.toymoban.com/news/detail-782035.html
主程序设计
void main()
{
T0_Init(); //定时器0初始化
T1_Init(); //定时器1初始化
FWD_LED = 0; //正转指示灯亮,默认初始化是正转
delay_ms(500); //延时500ms,待各个模块上电稳定
EA = 1; //开启中断
while(1)
{
KeyService(); //按键服务程序
}
}
//-----------------------------------------------------------------
// Timer0 初始化,模式1,允许中断,1ms定时
// Timer0 用于按键扫描
//-----------------------------------------------------------------
void T0_Init()
{
TMOD &= 0xF0;
TMOD |= 0x01; //T0工作于模式1,16位定时器
TH0 = (65536 - 1000) >> 8; //1ms定时
TL0 = (65536 - 1000) & 0xFF;
ET0 = 1; //允许T0中断
TR0 = 1; //启动T0
}
//-----------------------------------------------------------------
// Timer1 初始化,模式1,允许中断
// Timer1 用于改变步进电机转速
//-----------------------------------------------------------------
void T1_Init()
{
TMOD &= 0x0F;
TMOD |= 0x10; //定时器1工作于模式1,16位定时器
TH1 = Timer[speed][0];
TL1 = Timer[speed][1]; //定时器1,定时用于步进电机转速控制
ET1 = 1; //允许T1中断
PT1 = 1; //定时器1优先级高
TR1 = 0; //关闭定时器1
}
//-----------------------------------------------------------------
// Timer0 中断服务程序
//-----------------------------------------------------------------
void InterruptTime0() interrupt 1
{
TH0 = (65536 - 1000) >> 8; //1ms
TL0 = (65536 - 1000) & 0xFF;
KeyScan(); //按键扫描
}源文件获取
关注公众号-电子开发圈,首页发送 “电机” 获取;文章来源地址https://www.toymoban.com/news/detail-782035.html
到了这里,关于基于单片机的步进电机调控系统设计(#0527)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!