前言
modbus在上下位机数据交互时被广泛使用,因此写了这篇笔记和大家一起学习。
【Qt Modbus通信】libmodbus实现modbus的主机功能/从机功能 源码分享
之前使用libmodbus实现了modbus的主从功能,但发现主机查询从机的从机ID不能大于200+,因此参考QT5的modbusDEMO重新写了一份基于QModbus实现的modbus主机功能。
参考文献

程序执行效果
QT官方DEMO modbus主机 运行效果
modbus主机 运行效果
源码下载
https://gitee.com/jiang_bin_yu/QSerialBus-modbus-master/tree/master/
程序源码
下面我将官方DEMO中的关键代码移植出来,实现了modbus主机程序
一、项目配置QT += core gui serialport serialbus
二、寻找可用串口
void MainWindow::freshSerialPortCombox()
{
foreach (const QSerialPortInfo &info,QSerialPortInfo::availablePorts())
{
QSerialPort tempSer;
tempSer.setPort(info);
if(tempSer.open(QIODevice::ReadWrite))
{
ui->comboBox_serialName->addItem(tempSer.portName());
tempSer.close();
}
}
}
三、初始modbus
void MainWindow::MainWindow::InitModbus()
{
//获取modbus raw 数据帧
connect(SaveLog::Instance(),&SaveLog::sigModbusData,this,&MainWindow::onModbusRawData);
if (modbusDevice) {
modbusDevice->disconnectDevice();
delete modbusDevice;
modbusDevice = nullptr;
}
modbusDevice = new QModbusRtuSerialMaster(this);
connect(modbusDevice, &QModbusClient::errorOccurred, [this](QModbusDevice::Error) {
qDebug() << "modbus Error:" << modbusDevice->errorString();
});
}
四、串口连接
void MainWindow::connectModbus()
{
disconnnectModbus();
if (!modbusDevice)
return;
modbusDevice->setConnectionParameter(QModbusDevice::SerialPortNameParameter,ui->comboBox_serialName->currentText());
modbusDevice->setConnectionParameter(QModbusDevice::SerialParityParameter,parity);
modbusDevice->setConnectionParameter(QModbusDevice::SerialBaudRateParameter,baud);
modbusDevice->setConnectionParameter(QModbusDevice::SerialDataBitsParameter,dataBit);
modbusDevice->setConnectionParameter(QModbusDevice::SerialStopBitsParameter,stopBit);
modbusDevice->setTimeout(1000);
modbusDevice->setNumberOfRetries(0);
//连接失败
if(modbusDevice->connectDevice())
{
ui->pushButton_connect->setText("断开连接");
qDebug() << "连接成功";
}
else
{
ui->pushButton_connect->setText("建立连接");
qDebug() << "连接失败";
QMessageBox::information(NULL, "Title", "串口打开失败");
}
}
五、写入寄存器
a.writeUnit:写入寄存器 slaveId 写入的从机ID startAddress写入的起始地址 values写入的值
void MainWindow::writeUnit(int slaveId, int startAddress, QList<quint16> values)
{
if (!modbusDevice)
{
QMessageBox::information(NULL, "Title", "请先连接设备");
return;
}
connectModbus();
QModbusDataUnit writeUnit = QModbusDataUnit(QModbusDataUnit::HoldingRegisters,startAddress, values.size());
for(int i=0; i<values.size(); i++)
{
writeUnit.setValue(i, values.at(i));
}
//serverEdit 发生给slave的ID
if (auto *reply = modbusDevice->sendWriteRequest(writeUnit,slaveId)) {
if (!reply->isFinished()) {
connect(reply, &QModbusReply::finished, this, [this, reply]() {
if (reply->error() == QModbusDevice::ProtocolError) {
qDebug() << QString("Write response error: %1 (Mobus exception: 0x%2)")
.arg(reply->errorString()).arg(reply->rawResult().exceptionCode(), -1, 16);
} else if (reply->error() != QModbusDevice::NoError) {
qDebug() << QString("Write response error: %1 (code: 0x%2)").
arg(reply->errorString()).arg(reply->error(), -1, 16);
}
reply->deleteLater();
});
} else {
reply->deleteLater();
}
} else {
qDebug() << QString(("Write error: ") + modbusDevice->errorString());
}
}
b.writeUnit的调用方法
void MainWindow::on_pushButton_send_clicked()
{
QList<quint16> values;
for(quint16 i=0; i<READNUM; i++)
{
values.append(i);
}
writeUnit(0x01,0,values); //修改从机0x01,0~50寄存器的值
}
五、读取寄存器
a.readUnit:读取寄存器 slaveId 读取的从机ID startAddress读取的起始地址 readNum读取的数量
void MainWindow::readUnit(int slaveId, int startAddress, int readNum)
{
if (!modbusDevice)
{
QMessageBox::information(NULL, "Title", "请先连接设备");
return;
}
connectModbus();
QMutexLocker lock(&m_modbusMutex);
if (auto *reply = modbusDevice->sendReadRequest(QModbusDataUnit(QModbusDataUnit::HoldingRegisters, startAddress, readNum), slaveId)) {
if (!reply->isFinished())
connect(reply, &QModbusReply::finished, this, &MainWindow::onReadReady);
else
delete reply;
} else {
qDebug() << "Read error: " << modbusDevice->errorString();
}
}
b.接受modbus返回数据
void MainWindow::onReadReady()
{
auto reply = qobject_cast<QModbusReply *>(sender());
if (!reply)
return;
if (reply->error() == QModbusDevice::NoError) {
const QModbusDataUnit unit = reply->result();
if(unit.valueCount() == READNUM)
for (uint i = 0; i < unit.valueCount(); i++) {
const QString entry = tr("Address: %1, Value: %2").arg(unit.startAddress() + i)
.arg(QString::number(unit.value(i),
unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16));
ui->textBrowser->append(entry);
}
} else if (reply->error() == QModbusDevice::ProtocolError) {
qDebug() << QString("Read response error: %1 (Mobus exception: 0x%2)").
arg(reply->errorString()).
arg(reply->rawResult().exceptionCode(), -1, 16);
} else {
qDebug() << QString("Read response error: %1 (code: 0x%2)").
arg(reply->errorString()).
arg(reply->error(), -1, 16);
}
reply->deleteLater();
}
六、如果你想获得你发送和接受的modbus数据帧,可以参考下我下面这个愚蠢的办法
a.设置日志过滤器,开启关于qt.modbus*的日志打印
QLoggingCategory::setFilterRules(QStringLiteral("qt.modbus* = true"));
开启后你的调试栏讲会打印modbus相关的内容
b.如果你想获取这些内容并发送给你的界面,你需要开启日志重定向,即装载新的日志钩子(详细请参考上面码云提供的源码 代码在:QModbusDemo/savelog.cpp)
//日志重定向
#if (QT_VERSION <= QT_VERSION_CHECK(5,0,0))
void Log(QtMsgType type, const char *msg)
#else
void Log(QtMsgType type, const QMessageLogContext &, const QString &msg)
#endif
{
//加锁,防止多线程中qdebug太频繁导致崩溃
static QMutex mutex;
QMutexLocker locker(&mutex);
QString content;
//这里可以根据不同的类型加上不同的头部用于区分
switch (type) {
case QtDebugMsg:
content = QString("%1").arg(msg);
break;
case QtWarningMsg:
content = QString("QtWarningMsg: %1").arg(msg);
break;
case QtCriticalMsg:
content = QString("QtCriticalMsg: %1").arg(msg);
break;
case QtFatalMsg:
content = QString("QtFatalMsg: %1").arg(msg);
break;
default: break;
}
SaveLog::Instance()->save(content);
}
//安装日志钩子,输出调试信息到文件,便于调试
void SaveLog::start()
{
#if (QT_VERSION <= QT_VERSION_CHECK(5,0,0))
qInstallMsgHandler(Log);
#else
qInstallMessageHandler(Log);
#endif
}
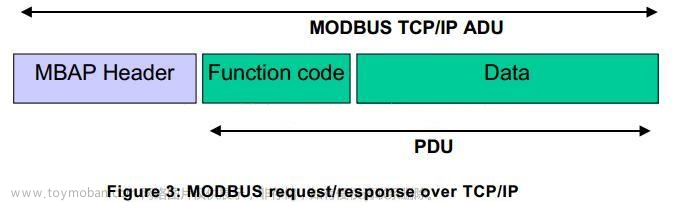
c.在日志重定向中,拦截(RTU client) Sent Serial ADU:和(RTU client) Received ADU:关键字的日志,并将其内容截取发送给mainwindow
void SaveLog::save(const QString &content)
{
if(1)
{
QString msg = static_cast<QString>(content);
std::cout << msg.toLocal8Bit().data() << std::endl;
//方法改进:之前每次输出日志都打开文件,改成只有当日期改变时才新建和打开文件
if(content.contains("(RTU client) Sent Serial ADU:"))
{
//(RTU client) Sent Serial ADU: 0xfe0300000029901b
//std::cout << "SendMsg" << msg.toUtf8().data() << std::endl;
msg = msg.remove(msg.indexOf("(RTU client) Sent Serial ADU:"),32);
msg = msg.left(msg.size());
msg = msg.toUpper();
int n = msg.length();
while(n-2 > 0)
{
n = n - 2;
msg.insert(n," ");
}
emit sigModbusData(msg,0);
//std::cout << "SendMsg: " << msg.toLocal8Bit().data() << std::endl;
}
else if(content.contains("(RTU client) Received ADU:"))
{
//std::cout << "RecvMsg" << msg.toLocal8Bit().data() << std::endl;
msg = msg.remove(msg.indexOf("(RTU client) Received ADU:"),28);
msg = msg.left(msg.size()-1);
msg = msg.toUpper();
int n = msg.length();
while(n-2 > 0)
{
n = n - 2;
msg.insert(n," ");
}
emit sigModbusData(msg,1);
//std::cout << "Received: " << msg.toLocal8Bit().data() << std::endl;
}
else if(!content.contains("(RTU client)"))
{
if(this->fileName.isEmpty())
{
QString fileName = QString("%1/Log/%2_log_%3.txt").arg(path).arg(name).arg(QDATETIME);
if (this->fileName != fileName) {
this->fileName = fileName;
if (file->isOpen()) {
file->close();
}
file->setFileName(fileName);
file->open(QIODevice::WriteOnly | QIODevice::Append | QFile::Text);
}
}
QTextStream logStream(file);
logStream << QString("%1--Debug %2").arg(QDATETIME_zzz).arg(msg) << "\n";
}
}
}
d.绑定信号与槽,将接受到的modbus数据帧显示在textBrowser上
//获取modbus raw 数据帧
connect(SaveLog::Instance(),&SaveLog::sigModbusData,this,&MainWindow::onModbusRawData);
//获取modbus数据帧 0发送的数据 1接受的数据
void MainWindow::onModbusRawData(QString data, int type)
{
QString color;
QString text;
if(type == 0) //发送
{
text = "发送数据帧:";
color = "#F37257";
}
else if(type == 1) //接受
{
text = "接受数据帧:";
color = "#1777D7";
}
// 设置文字(样式+内容)
QString str = QString("<font color=\"%1\">" +QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss ")+ text + data + "</font>").arg(color);
ui->textBrowser->append(str);
}
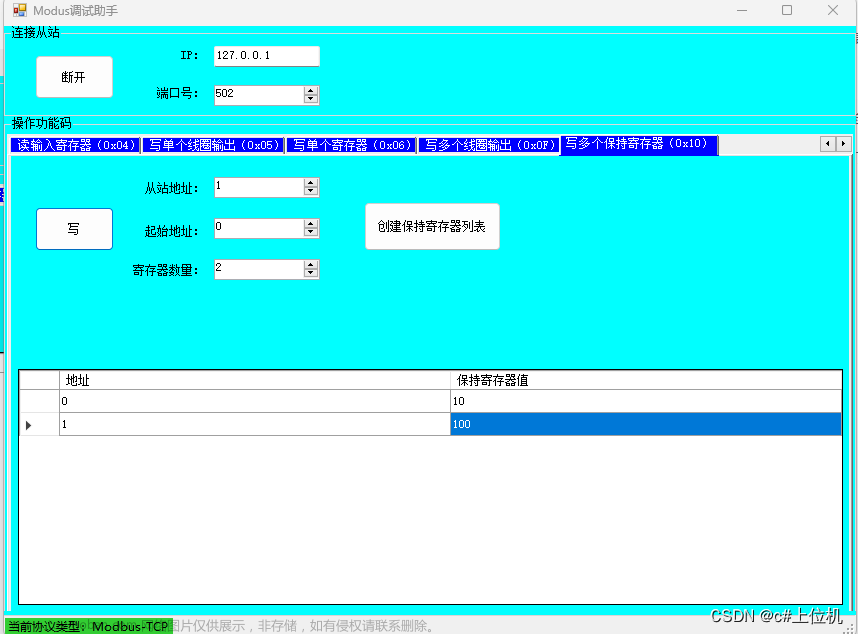
程序效果如下图所示文章来源:https://www.toymoban.com/news/detail-782036.html
 文章来源地址https://www.toymoban.com/news/detail-782036.html
文章来源地址https://www.toymoban.com/news/detail-782036.html
到了这里,关于【Qt Modbus通信】QModbus实现modbus的主机功能 源码分享的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!