一、开发环境
部署平台:英伟达的Jetson Nano
环境:Linux + ROS
语言:C++
设备:1920*1080像素的摄像头、开发板。
模型:yolo-v8s
二、单目测距实现思路
0、标定相机和车辆(假设已经标定完成)
1、通过yolo对目标检测,获得ROI区域
2、根据ROI计算车辆和地面接触的中心点
3、根据车辆类别先验信息,主要是高度真实数据,反算车辆的实际距离
完整代码链接,要点小费哦
三、核心代码展示文章来源:https://www.toymoban.com/news/detail-782303.html
等会儿上传
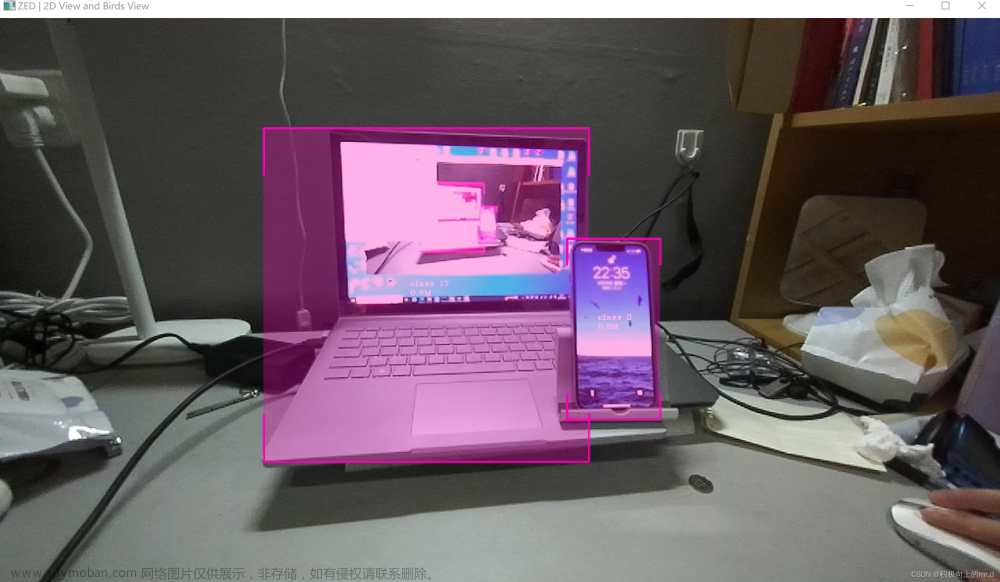
四、效果图 文章来源地址https://www.toymoban.com/news/detail-782303.html
文章来源地址https://www.toymoban.com/news/detail-782303.html
到了这里,关于单目测距(车辆测距+前车碰撞预警)-基于yolov8/yolov7/yolov5——毕业设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!