目录
神经网络轨迹预测综述:
比较新的轨迹预测网络
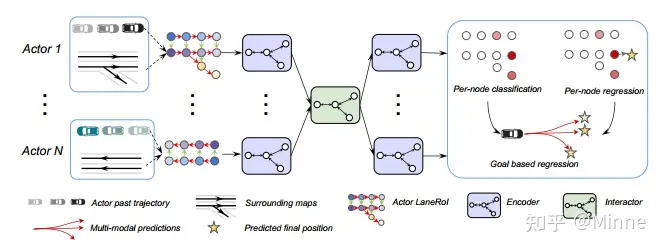
Uber:LaneRCNN[5]
Google:VectorNet[6]
Huawei:HOME[7]
Waymo:TNT[8]
Aptive:Covernet[9]
NEC:R2P2[10]
商汤:TPNet[11]
美团:StarNet[12]。行人
Aibee:Sophie[13]。行人
MIT:Social lstm[14]。行人
中科大:STGAT[15]。行人
百度:Lane-Attention[16]
神经网络轨迹预测综述:
【自动驾驶01】轨迹预测方法总结_轨迹预测要从历史轨迹最后一步开始-CSDN博客
比较新的轨迹预测网络
自动驾驶轨迹预测-综述 - 知乎
Uber:LaneRCNN[5]

Google:VectorNet[6]

Huawei:HOME[7]

Waymo:TNT[8]

Aptive:Covernet[9]

NEC:R2P2[10]

商汤:TPNet[11]

美团:StarNet[12]。行人

Aibee:Sophie[13]。行人

MIT:Social lstm[14]。行人

中科大:STGAT[15]。行人

百度:Lane-Attention[16]
 文章来源:https://www.toymoban.com/news/detail-783243.html
文章来源:https://www.toymoban.com/news/detail-783243.html
Apollo:可以看如下博客作为参考。文章来源地址https://www.toymoban.com/news/detail-783243.html
到了这里,关于自动驾驶轨迹预测的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!