提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
接下来的时代是一个人工智能的时代,人工智能的时代就是传感器的时代,“智能”传感器的时代。传感器必须具备一定的信息处理的功能,不再是简单的采集数据的设备,是需要作为一个相对独立的感知(sensing)、存储(storge)、计算(computing)单元的。文章来源:https://www.toymoban.com/news/detail-784121.html
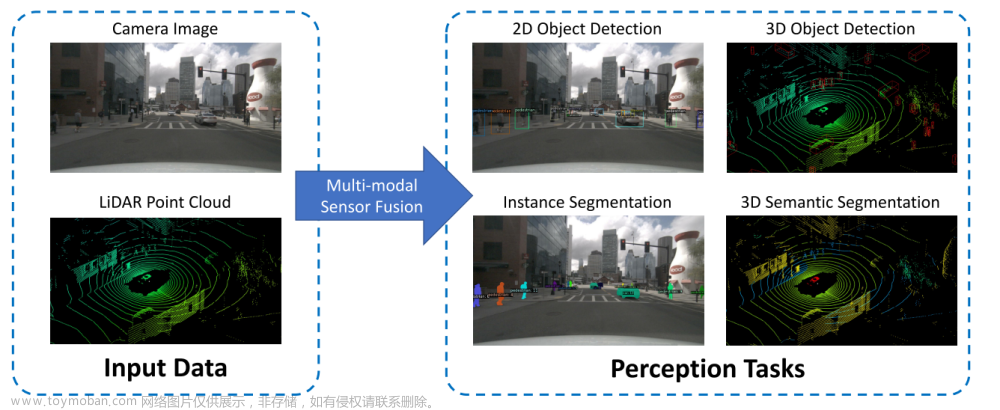
感知网络中的传感器节点的数量在快速增长,导致了感知终端与计算单元之间的大量的冗余数据的交换 。为了更加高效地处理这些数据,并且降低计算功耗,很有必要发展一种新的计算范式,减少这些冗余数据在感知终端和计算单元之间的来回搬运,这就是所谓的传感器端计算,或者感存算一体化。顾名思义,近传感器计算就是在传感器附近进行数据的运算,传感器运算就是在传感器的内部单元进行一定的数据运算。
文章来源地址https://www.toymoban.com/news/detail-784121.html
到了这里,关于传感器端计算( in-sensor computing)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!