4 ESPRIT 算法
4.1 算法原理
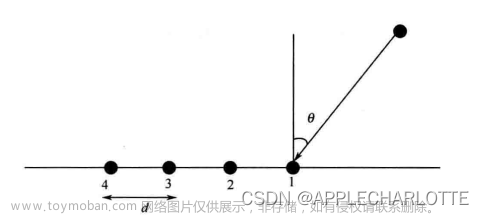
ESPRIT 算法假设阵列传感器成对出现(即有一组平行的传感器),并且每对传感器之间有相同的位移
Δ
\Delta
Δ。这两组传感器的阵列接收向量分别表示如下:
x
(
t
)
=
A
s
(
t
)
+
n
x
(
t
)
y
(
t
)
=
A
Φ
s
(
t
)
+
n
y
(
t
)
\begin{equation*} \begin{aligned} \mathbf{x}(t) &= \mathbf{A}\mathbf{s}(t) + \mathbf{n}_x(t) \\ \mathbf{y}(t) &= \mathbf{A}\Phi\mathbf{s}(t) + \mathbf{n}_y(t) \end{aligned} \end{equation*}
x(t)y(t)=As(t)+nx(t)=AΦs(t)+ny(t)
其中
x
(
t
)
\mathbf{x}(t)
x(t) 和
y
(
t
)
\mathbf{y}(t)
y(t) 为两个子阵列,该两个阵列的阵元数相同,且对应阵元之间的相位差相同;
Φ
\Phi
Φ 表示由阵列
x
(
t
)
\mathbf{x}(t)
x(t) 向阵列
y
(
t
)
\mathbf{y}(t)
y(t) 转换的矩阵,以 ULA 为例,则有:
Φ
=
diag
{
exp
(
j
2
π
Δ
sin
θ
1
/
λ
)
,
⋯
,
exp
(
j
2
π
Δ
sin
θ
K
/
λ
)
}
\begin{equation*} \Phi = \operatorname{diag}\{\exp(j 2\pi \Delta \sin \theta_1 / \lambda), \cdots, \exp(j 2\pi \Delta \sin \theta_K / \lambda) \} \end{equation*}
Φ=diag{exp(j2πΔsinθ1/λ),⋯,exp(j2πΔsinθK/λ)}
由该对平行传感器组成的总阵列接收向量
z
(
t
)
∈
C
2
M
×
1
\mathbf{z}(t) \in \mathbb{C}^{2M\times 1}
z(t)∈C2M×1 如下:
z
(
t
)
=
[
x
(
t
)
y
(
t
)
]
=
A
‾
s
(
t
)
+
n
z
(
t
)
=
[
A
A
Φ
]
s
(
t
)
+
[
n
x
(
t
)
n
y
(
t
)
]
\begin{equation*} \begin{aligned} \mathbf{z}(t) &= \begin{bmatrix} \mathbf{x}(t) \\ \mathbf{y}(t) \end{bmatrix} = \overline{\mathbf{A}} \mathbf{s}(t) + \mathbf{n}_z(t) \\ &= \begin{bmatrix} \mathbf{A} \\ \mathbf{A}\Phi \end{bmatrix} \mathbf{s}(t) + \begin{bmatrix} \mathbf{n}_x(t) \\ \mathbf{n}_y(t) \end{bmatrix} \end{aligned} \end{equation*}
z(t)=[x(t)y(t)]=As(t)+nz(t)=[AAΦ]s(t)+[nx(t)ny(t)]
且总阵列接收矩阵为
Z
=
[
z
(
1
)
,
⋯
,
z
(
T
)
]
\mathbf{Z} = [\mathbf{z}(1), \cdots, \mathbf{z}(T)]
Z=[z(1),⋯,z(T)],利用
Z
\mathbf{Z}
Z 可以获得信号子空间
U
S
∈
C
2
M
×
K
\mathbf{U}_S \in \mathbb{C}^{2M\times K}
US∈C2M×K。
信号子空间的一个特性就是与方向矢量矩阵所张成的空间是一致的,即
span
(
A
‾
)
=
span
(
U
S
)
\operatorname{span}(\overline{\mathbf{A}}) = \operatorname{span}(\mathbf{U}_S)
span(A)=span(US),因此必定存在一个唯一的非奇异满秩方阵
T
\mathbf{T}
T 使得下式成立:
U
S
=
A
‾
T
\begin{equation*} \mathbf{U}_S = \overline{\mathbf{A}} \mathbf{T} \end{equation*}
US=AT
且
U
S
\mathbf{U}_S
US 同样可以分成上下两部分:
U
S
=
[
U
X
U
Y
]
=
[
A
T
A
Φ
T
]
\begin{equation*} \mathbf{U}_S = \begin{bmatrix} \mathbf{U}_X \\ \mathbf{U}_Y \end{bmatrix} = \begin{bmatrix} \mathbf{A} \mathbf{T} \\ \mathbf{A} \Phi \mathbf{T} \end{bmatrix} \end{equation*}
US=[UXUY]=[ATAΦT]
由上式可以推导出:
U
Y
=
U
X
T
−
1
Φ
T
\begin{equation*} \mathbf{U}_Y = \mathbf{U}_X \mathbf{T}^{-1} \Phi \mathbf{T} \end{equation*}
UY=UXT−1ΦT
此时令
Ψ
=
T
−
1
Φ
T
\Psi = \mathbf{T}^{-1} \Phi \mathbf{T}
Ψ=T−1ΦT 则有:
U
Y
=
U
X
Ψ
\begin{equation*} \mathbf{U}_Y = \mathbf{U}_X \Psi \end{equation*}
UY=UXΨ
上式表明了:
U
Y
\mathbf{U}_Y
UY 和
U
X
\mathbf{U}_X
UX 所张成的空间是一致的,即
span
(
U
X
)
=
span
(
U
Y
)
\operatorname{span}(\mathbf{U}_X) = \operatorname{span}(\mathbf{U}_Y)
span(UX)=span(UY),且
Φ
\Phi
Φ 和
Ψ
\Psi
Ψ 为相似矩阵,
Φ
\Phi
Φ 的对角元素是
Ψ
\Psi
Ψ 的特征值。这意味着只需要求得
Ψ
\Psi
Ψ 然后进行特征值分解即可:
Ψ
=
U
X
†
U
Y
\begin{equation*} \Psi = \mathbf{U}_X^{\dagger} \mathbf{U}_Y \end{equation*}
Ψ=UX†UY
其中
(
⋅
)
†
(\cdot)^{\dagger}
(⋅)† 表示伪逆。由前面的讨论可以看出,只要能估计出
Ψ
\Psi
Ψ,就能估计出
Φ
\Phi
Φ,同时可以得到到达角度。
然而通常情况下只有一组传感器阵列
X
=
[
x
(
1
)
,
⋯
,
x
(
T
)
]
\mathbf{X} = [\mathbf{x}(1), \cdots, \mathbf{x}(T)]
X=[x(1),⋯,x(T)],因此需要做的就是通过
X
\mathbf{X}
X 构造
Z
=
[
z
(
1
)
,
⋯
,
z
(
T
)
]
\mathbf{Z} = [\mathbf{z}(1), \cdots, \mathbf{z}(T)]
Z=[z(1),⋯,z(T)],对于 ULA 而言,第一组元素可以取
M
M
M 个阵元中的
1
∼
M
−
1
1\sim M-1
1∼M−1 个(前
M
−
1
M-1
M−1 个),第二组元素可以取
M
M
M 个阵元中的
2
∼
M
2\sim M
2∼M 个(后
M
−
1
M-1
M−1 个),则此时可以认为
Δ
=
−
d
\Delta = -d
Δ=−d。
具体来说,我们不需要直接构造
Z
\mathbf{Z}
Z,因为利用
Z
\mathbf{Z}
Z 构造
U
S
∈
C
2
M
×
K
\mathbf{U}_S \in \mathbb{C}^{2M\times K}
US∈C2M×K 计算量上较大;可以通过
X
\mathbf{X}
X 构造
U
S
\mathbf{U}_S
US,然后分别取
U
S
\mathbf{U}_S
US 的前
M
−
1
M-1
M−1 个和后
M
−
1
M-1
M−1 个组成
U
X
∈
C
(
M
−
1
)
×
K
\mathbf{U}_X \in \mathbb{C}^{(M-1)\times K}
UX∈C(M−1)×K 和
U
Y
∈
C
(
M
−
1
)
×
K
\mathbf{U}_Y\in \mathbb{C}^{(M-1)\times K}
UY∈C(M−1)×K。需要注意的是这两种构造方法是等价操作。文章来源:https://www.toymoban.com/news/detail-784669.html
4.2 算法步骤
ESPRIT 算法步骤如下(输入为阵列接收矩阵 X \mathbf{X} X):文章来源地址https://www.toymoban.com/news/detail-784669.html
- 计算协方差矩阵 R = 1 T X X H \mathbf{R} = \frac{1}{T} \mathbf{X}\mathbf{X}^H R=T1XXH。
- 对 R \mathbf{R} R 进行特征值分解,并对特征值进行排序,然后取得 K K K 个较大特征值对应的特征向量来组成信号子空间 U S \mathbf{U}_S US。
- 分别取 U S \mathbf{U}_S US 的前 M − 1 M-1 M−1 行和后 M − 1 M-1 M−1 行形成 U X \mathbf{U}_X UX 和 U Y \mathbf{U}_Y UY。
- 使用最小二乘法(或者完全最小二乘法)求解出
Ψ
\Psi
Ψ:
Ψ = U X † U Y \begin{equation*} \Psi = \mathbf{U}_X^{\dagger} \mathbf{U}_Y \end{equation*} Ψ=UX†UY - 对 Ψ \Psi Ψ 进行特征值分解,得到 K K K 个特征值 { z i : i = 1 , ⋯ , K } \{z_i:i = 1, \cdots, K\} {zi:i=1,⋯,K}。
- 利用下式求得角度
{
θ
i
:
i
=
1
,
⋯
,
K
}
\{\theta_i: i = 1,\cdots, K\}
{θi:i=1,⋯,K}:
θ i = arcsin ( − λ 2 π d arg { z i } ) , i = 1 , ⋯ , K \begin{equation*} \theta_i = \arcsin\left(-\frac{\lambda}{2\pi d} \arg \{ z_i \} \right), i = 1, \cdots, K \end{equation*} θi=arcsin(−2πdλarg{zi}),i=1,⋯,K
4.3 代码实现
% esprit.m
clear;
clc;
close all;
%% 参数设定
c = 3e8; % 光速
fc = 500e6; % 载波频率
lambda = c/fc; % 波长
d = lambda/2; % 阵元间距,可设 2*d = lambda
twpi = 2.0*pi; % 2pi
derad = pi/180; % 角度转弧度
theta = [-20, 30]*derad; % 待估计角度
idx = 0:1:7; idx = idx'; % 阵元位置索引
M = length(idx); % 阵元数
K = length(theta); % 信源数
T = 512; % 快拍数
SNR = 10; % 信噪比
%% 信号模型建立
S = randn(K, T) + 0j*randn(K,T); % 复信号矩阵S,维度为K*T
% A = exp(-1j*twpi*d*idx*sin(theta)/lambda); % 方向矢量矩阵A,维度为M*K
A = exp(-1j*pi*idx*sin(theta)); % 2d = lambda,直接忽略不写
X = A*S; % 接收矩阵X,维度为M*T
X = awgn(X,SNR,'measured'); % 添加噪声
%% ESPRIT 算法
% 计算协方差矩阵
R = X*X'/T;
% 特征值分解并取得信号子空间
[U,D] = eig(R); % 特征值分解
[D,I] = sort(diag(D)); % 将特征值排序从小到大
U = fliplr(U(:, I)); % 对应特征矢量排序,fliplr 之后,较大特征值对应的特征矢量在前面
Us = U(:, 1:K); % 信号子空间
% 角度估计
Ux = Us(1:M-1, :);
Uy = Us(2:M, :);
% 方法一:最小二乘法
% Psi = pinv(Ux)*Uy;
% Psi = linsolve(Ux,Uy); % Ux\Uy
% 方法二:完全最小二乘法
Uxy = [Ux, Uy];
Uxy = Uxy'*Uxy;
[U,D] = eig(Uxy);
[D,I] = sort(diag(D));
F = fliplr(U(:,I));
F0 = F(1:K, K+1:K*2); % F0是F的左上角部分
F1 = F(K+1:K*2, K+1:K*2); % F1是F的右下角部分
Psi = -F0/F1;
[T,Phi] = eig(Psi);
Theta = asin(-angle(diag(Phi))/pi)/derad; % 估计角度
Theta = sort(Theta).';
disp('估计结果:');
disp(Theta);
4.4 参考内容
- Roy R, Kailath T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on acoustics, speech, and signal processing, 1989, 37(7): 984-995.
- 【知乎】ESPRIT算法的数理逻辑(DOA)(包含每一个细节)
- 【CSDN】DOA算法2:ESPRIT算法
- 【CSDN】【阵列信号处理】DOA估计算法
到了这里,关于【学习笔记】【DOA子空间算法】4 ESPRIT 算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!