单片机型号及压力传感器:
STM32F103C8T6 最小系统板
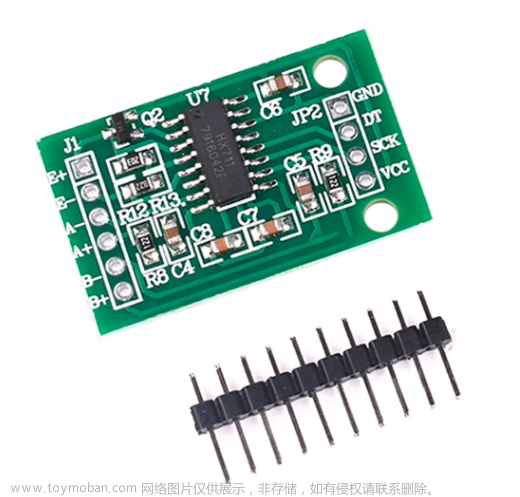
压力传感器选用的是薄膜压力传感器
生活中经常遇到需要测量压力值,因此,考虑到这样的需求从网上买了一个薄膜压力传感器,实物图如下:

柔性薄膜压力传感器的产品特点:
- 超薄,厚度小于0.3mm
- 响应速度快
- 寿命长,通过100万次以上按压测试
- 检测电路简单,易于集成应用
- 可定制传感器外形
- 可定制传感器量程参数
产品描述:
柔性压力传感器再柔韧轻薄材料上印刷附着力强、耐弯折、灵敏度高的柔性纳米功能材料,使其实现对压力的高灵敏度检测。
柔性薄膜压力传感器是一种电阻式传感器,输出电阻随施加再传感器表面压力的增大而减小,通过特定的压力-电阻关系,可测量出压力大小。适用于柔性面的压力测量场景,可广泛应用于智能家居、消费电子、汽车电子、医疗设备、工业控制、智能机器人等领域。
其它一些特性,大家可以网上查询,网上资料很多。
测量压力的电路有两种形式:
方法一、相对简单,只需要测量传感器的电压变化即可分析出压力的变化。
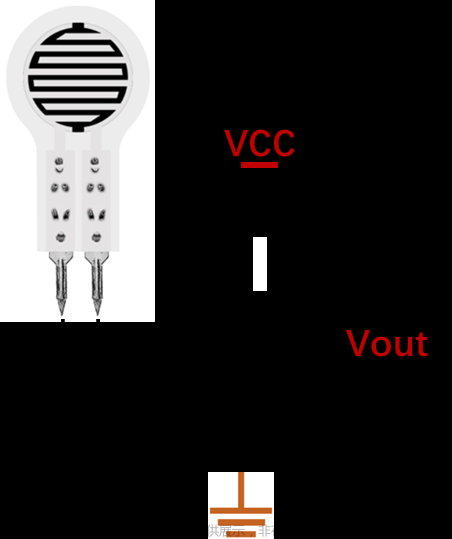
该电路采用分压方式测量。将压力变化再传感器上产生的电阻值的变化,转换为电压的变化,Vout为输出电压,可接到后端电路。
- 根据实际情况选择R1,通常可取47KΩ-1MΩ
- 无压力时,传感器阻值在10MΩ以上,等效与断路
方法二、相对复杂,通过运放实现电压和电流的变化。
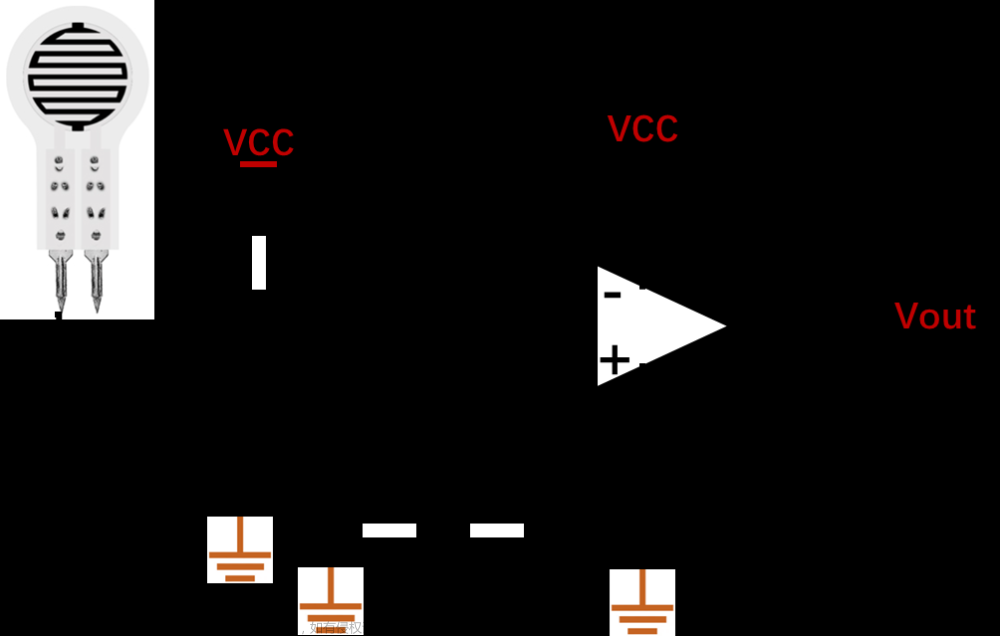
在分压测量的基础上,增加运算放大器电路,可提高电压测量分辨率;增大驱动电流。
- 根据实际情况选择电路参数
- 无压力时,传感器阻值在10MΩ以上,近似断路
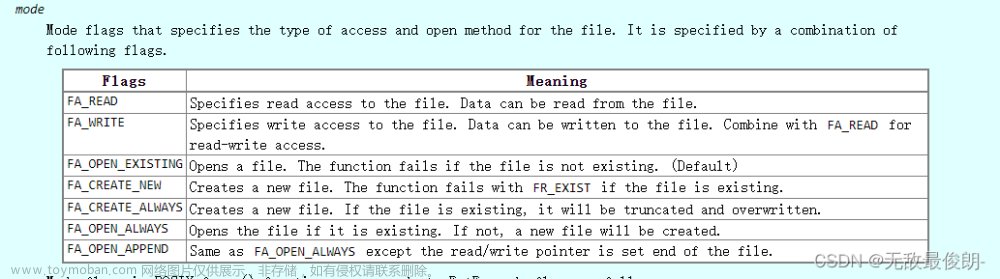
使用注意事项:
- 传感器使用时尽量使所受负载均匀,避免尖锐物体直接接触传感器;
- 超量程使用会降低传感器性能甚至破坏传感器;
- 传感器端子为铜镀锡材质,可根据需求自行焊接引线。要注意焊接温度不宜太高,建议不超过300℃,接触时间不超过1秒,以免高温使薄膜衬低融化变形。
文章中,使用方法一来实现压力信息的采集,材料的选择:
- 电阻这里使用的时R = 200KΩ
- 供电电源选用的是3.3V
- 选择一个适中的薄膜压力传感器
- 单片机选用STM32F103C8T6
- 将采集的信息通过串口1输出显示
接下来先看电路连接图:

加了热熔胶,极丑,将就看吧,接下来先用标准库完成压力值采集。
本课题涉及的技能点有如下几点:
1.ADC转换——采集压力传感器数据
2.串口——显示压力传感器数据
与STM32连接表:
| STM32 | 压力传感器 |
| PA1 | 输出引脚 |
| PA9 | 串口1TX |
| PA10 | 串口1RX |
标准库实现:
ADC实现
#include "stm32f10x.h"
#include "delay.h"
/****************************************
函数名称:void ADC_Config(void)
函数参数:无参
函数返回值:无
函数功能:ADC基本配置,选择PA5口
创建作者:王艇
创建时间:2021.5.26
联系方式:
修改作者:
修改时间:
修改说明:
****************************************/
void ADC_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// ADC1 工作模式配置
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 1, ADC_SampleTime_13Cycles5);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
}
/****************************************
函数名称:u16 Read_ADC(void)
函数参数:无参
函数返回值:u16 表示ADC的返回值
函数功能:获取ADC的值,并返回
创建作者:王艇
创建时间:2021.5.26
联系方式:
修改作者:
修改时间:
修改说明:
****************************************/
u16 Read_ADC(void)
{
u16 ADC_VALUE = 0;
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
ADC_VALUE = ADC_GetConversionValue(ADC1);
ADC_ClearFlag(ADC1, ADC_FLAG_EOC);
return ADC_VALUE;
}
void adc_1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //禁止扫面,单通道不需要扫描
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //不用外部触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //转换通道数 1
ADC_Init(ADC1, &ADC_InitStructure);
/* 配置ADC时钟为8分频,即9M */
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_13Cycles5);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1); //初始化ADC校准器
while(ADC_GetResetCalibrationStatus(ADC1)); //等待ADC校准寄存器初始化完成
ADC_StartCalibration(ADC1); //开始校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准完成
}
u16 get_adc(void)
{
u16 value;
/*读取ADC的值一定要调用此函数,因为前面配置为软件触发*/
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC));
value = ADC_GetConversionValue(ADC1);
return value;
}
//为了AD的转换值更加准确,我们采用多次采集求平均的方式
u16 Get_Adc_Average(u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=get_adc();
delay_ms(1);
}
return temp_val/times;
}
串口实现
#include "stm32f10x.h"
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
主函数main.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/main.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main program body
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "adc.h"
#include "delay.h"
#include "usart.h"
#include "stdio.h"
#include "string.h"
/**
* @brief Main program.
* @param None
* @retval None
*/
int main(void)
{
u16 temp = 0; // 中间变量
char str[20]; // 数组
int i = 0;
delay_init(); // 延时函数初始化
uart_init(9600); // 串口1函数初始化
adc_1_Init(); // ADC转换初始化
/* Infinite loop */
while (1)
{
USART_SendData(USART1, '|');
delay_ms(1);
temp = Get_Adc_Average(50);
temp = temp%10000;
sprintf(str,"%d\r\n",temp);
for(i = 0; i < strlen(str); i++)
{
USART_SendData(USART1, str[i]);
delay_ms(1);
}
strcpy(str,"");
delay_ms(100);
}
}
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
实现效果如下:

HAL库实现:
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
ADC_HandleTypeDef hadc1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t AdcValue = 0;
char str[30];
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_ADC_Start(&hadc1); //开始
while(HAL_OK != HAL_ADC_PollForConversion(&hadc1, 50)); //等待转换完成,50为最大等待时间,单位为ms
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC))
{
AdcValue=HAL_ADC_GetValue(&hadc1); //读取值
//准备串口输出
sprintf(str, "AdcValue:%d\r\n",AdcValue);
while(HAL_OK != HAL_UART_Transmit(&huart1, (uint8_t *)str ,strlen(str),500));
}
HAL_ADC_Stop(&hadc1); //结束
HAL_Delay(200);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL6;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief ADC1 Initialization Function
* @param None
* @retval None
*/
static void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_13CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
实现效果如下:
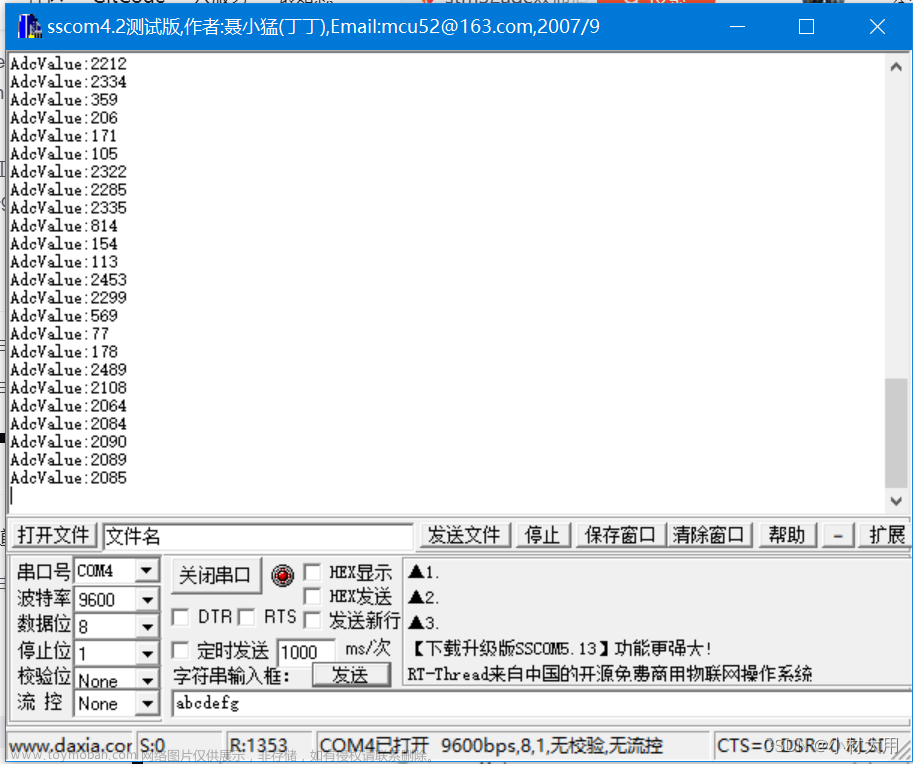
可以发现两次实现效果一样,实现了压力传感器的值采集.
具体实现代码链接:文章来源:https://www.toymoban.com/news/detail-784772.html
(41条消息) 薄膜压力传感器实现(标准库和HAL库实现)-嵌入式文档类资源-CSDN文库文章来源地址https://www.toymoban.com/news/detail-784772.html
到了这里,关于STM32实现薄膜压力传感器数据采集(标准库和HAL库实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!