实例4:树莓派GPIO控制舵机转动
实验目的
- 通过背景知识学习,了解舵机的外观及基本运动方式。
- 了解四足机器人mini pupper腿部单个舵机的组成结构。
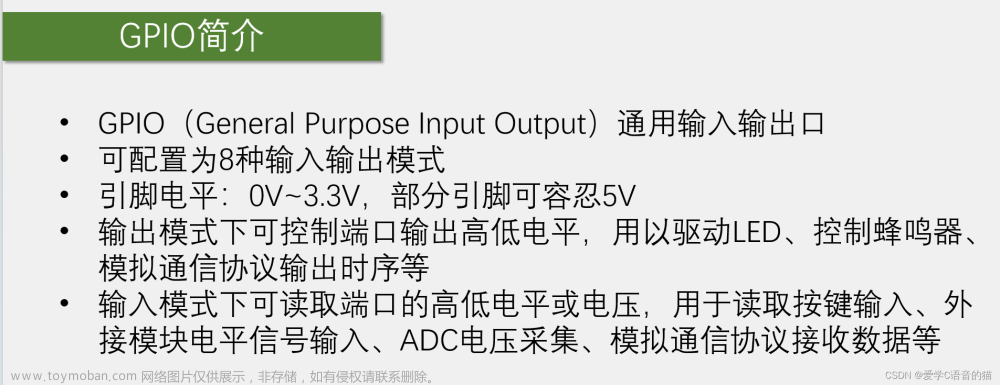
- 通过GPIO对舵机进行转动控制,熟悉PWM。
- 了解mini pupper舵机组的整体调零。
实验要求
使用Python语言编程,在编程中使用PWM方法,通过树莓派GPIO控制外部舵机来回摆动,角度范围为0°~180°,周期为四秒。
实验知识
1. 什么是舵机?
舵机(servomotor)是一种简化版本的伺服电机,是位置伺服的驱动器,能够通过输入PWM信号控制旋转角度,具备轻量、小型、简化和性价比高的特点。
舵机适用于那些需要角度不断变化并可以保持的简单控制系统,它能实现较为精确的电机控制,在航模、遥控玩具、机器狗等品类上运用良好。
图片1:一般舵机的外观
2. 舵机的运动方式
舵机的运动方式是绕轴摆动,“舵机”一词也和它的运动方式有关,舵机常用来摆动调整方向,就像海洋上的水手的舵一样,航模和船模常常用舵机的摆动来调整一些零部件的角度。
图片2:舵机的运动动图
3. 舵机的组成结构
舵机一般是由保护外壳、内部集成控制芯片、小型直流电机、减速器齿轮组、位置检测单元构成的。
当主控给舵机发出转动信号时,控制芯片驱动电机开始转动,通过减速器将动力传达到输出轴上的摆臂,由位置检测单元反馈转动结果信号给主控进行反馈调节。
一般来说,位置检测单元可以是可变电阻,当舵机转动时,可变电阻随之改变,由此可得转动的角度信息。舵机包含了电机、传感器和控制器,是一个集成度高的、完整的伺服电机系统。
图片3:舵机的内部结构拍摄
4. mini pupper定制舵机的部分硬件参数
芒砀科技MANGDANG针对mini pupper的运动需求,在原型舵机的基础上优化改进了机械结构,定制了mini pupper专用舵机,这使得mini pupper的控制更加精确、动力更加澎湃。
图片3:定制舵机的外观
参考链接:mini pupper定制电机规格书 课程附件 MiniPupper-Servo-Spec.pdf
5.mini pupper舵机的控制方法
对于舵机的控制,首先要了解其基本硬件参数以及舵机对信号通讯的要求。
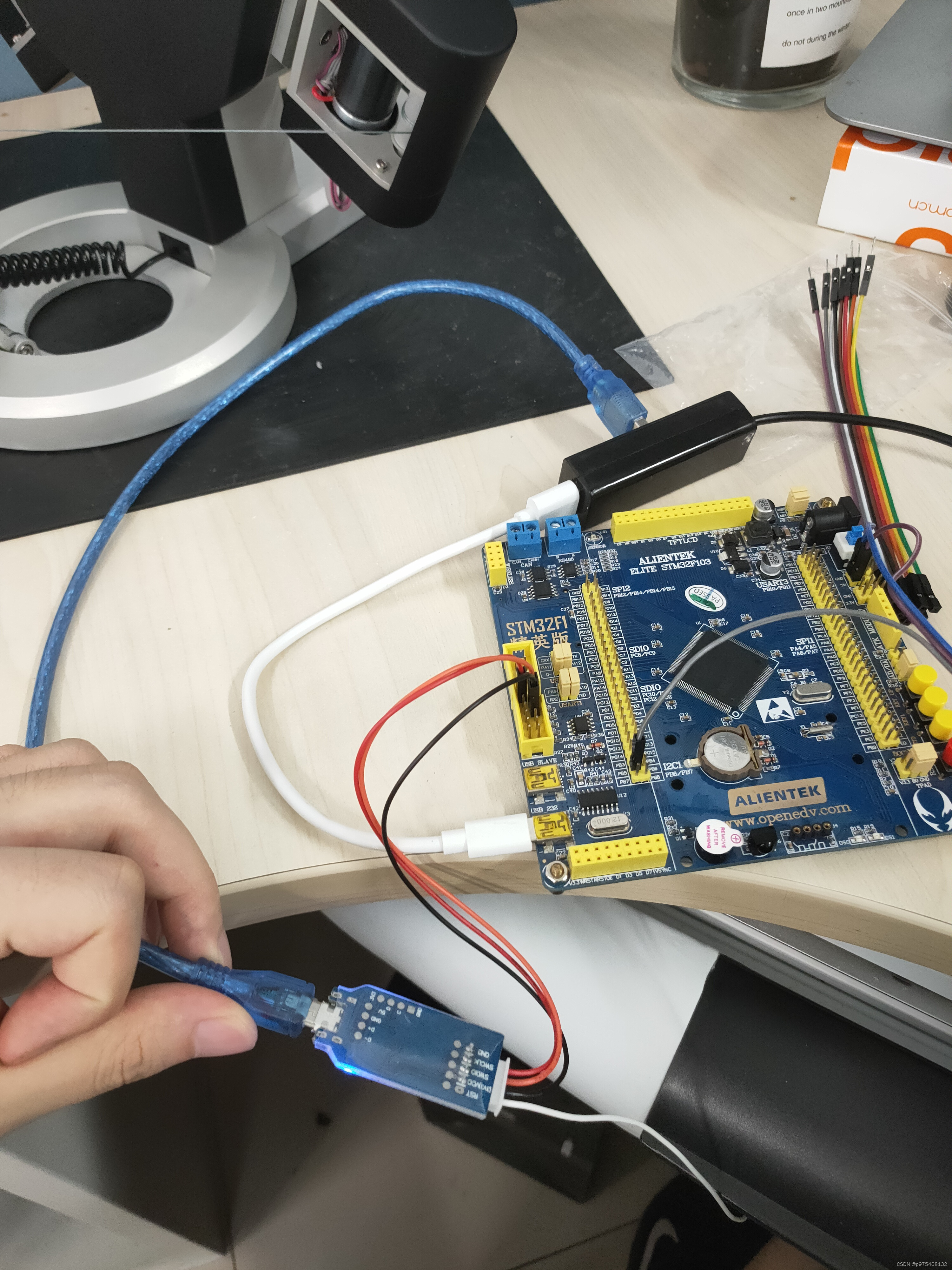
如图所示,mini pupper一代舵机允许PWM的直接使用,也就是说,舵机可以直接连接到树莓派上的GPIO_PWM端口使用而不需要考虑通讯协议,这对机器人入门开发者来说较为友好。
图片4:舵机端口的连线
mini pupper一代舵机部分参数表
| name | value |
|---|---|
| 端口1(黄) | PWM Signal |
| 端口2(红) | Vcc 4.8v~6v |
| 端口3 (棕) | GND |
| 信号周期 | 20ms |
| 信号频率 | 50HZ |
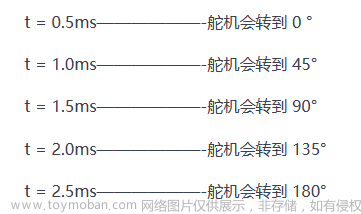
| 脉冲长度范围 | 500us-2500us to 0°~180° |
| 脉冲长度对应占空比 | 2.5% - 12.5% |
| 信号高电平范围 | 2V-5V |
| 信号低电平范围 | 0.0V-0.45V |
| 中间位对应脉冲 | 1500 μsec |
需要注意的是:
占空比=脉宽/周期
脉宽500us-2500us对应的占空比为2.5% - 12.5%
6. RPi的GPIO库中PWM的用法
import RPi.GPIO as GPIO # 引入GPIO库
GPIO.setmode(GPIO.BOARD) #初始化GPIO引脚编码方式,需放在代码正式开始处
GPIO.setup(12, GPIO.OUT) #初始化GPIO引脚设置,需放在代码正式开始处
p = GPIO.PWM(channel, frequency) # 创建pwm实例 channel为引脚号 frequency为频率
p.start(dc) # 开始pwm dc为初始占空比(0.0 <= dc <= 100.0)
p.stop() # 停止pwm
p.ChangeFrequency(freq) # 改变频率(Hz)freq
p.ChangeDutyCycle(dc) # 改变占空比(0.0 <= dc <= 100.0)
GPIO.cleanup() # 清理GPIO引脚
参考链接:RPi GPIO库中PWM()函数的详细资料
实验步骤
1. 编写Python程序 servo_PWM_GPIO.py
#!/usr/bin/python
# coding:utf-8
# servo_PWM_GPIO.py
# 树莓派GPIO控制外部舵机来回摆动,角度范围为0~180°,周期为4秒。
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importing RPi.GPIO! This is probably because you need superuser privileges. "
" You can achieve this by using 'sudo' to run your script")
import time
def servo_map(before_value, before_range_min, before_range_max, after_range_min, after_range_max):
"""
功能:将某个范围的值映射为另一个范围的值
参数:原范围某值,原范围最小值,原范围最大值,变换后范围最小值,变换后范围最大值
返回:变换后范围对应某值
"""
percent = (before_value - before_range_min) / (before_range_max - before_range_min)
after_value = after_range_min + percent * (after_range_max - after_range_min)
return after_value
GPIO.setmode(GPIO.BOARD) # 初始化GPIO引脚编码方式
servo_SIG = 32
servo_VCC = 4
servo_GND = 6
servo_freq = 50
servo_time = 0.01
servo_width_min = 2.5
servo_width_max = 12.5
# servo_degree_div =servo_width_max - servo_width_min)/180
GPIO.setup(servo_SIG, GPIO.OUT)
# 如果你需要忽视引脚复用警告,请调用GPIO.setwarnings(False)
# GPIO.setwarnings(False)
servo = GPIO.PWM(servo_SIG, servo_freq) # 信号引脚=servo_SIG 频率=servo_freq in HZ
servo.start(0)
servo.ChangeDutyCycle((servo_width_min+servo_width_max)/2) # 回归舵机中位
print('预设置完成,两秒后开始摆动')
time.sleep(2)
try: # try和except为固定搭配,用于捕捉执行过程中,用户是否按下ctrl+C终止程序
while 1:
for dc in range(1, 181, 1):
dc_trans = servo_map(dc, 0, 180, servo_width_min, servo_width_max)
servo.ChangeDutyCycle(dc_trans)
# print(dc_trans)
time.sleep(servo_time)
time.sleep(0.2)
for dc in range(180, -1, -1):
dc_trans = servo_map(dc, 0, 180, servo_width_min, servo_width_max)
servo.ChangeDutyCycle(dc_trans)
# print(dc_trans)
time.sleep(servo_time)
time.sleep(0.2)
except KeyboardInterrupt:
pass
servo.stop() # 停止pwm
GPIO.cleanup() # 清理GPIO引脚
2. 运行程序servo_PWM_GPIO.py并观察效果
在servo_PWM_GPIO.py的目录下执行以下命令:
sudo python servo_PWM_GPIO.py
此时应观察到舵机在树莓派的控制下来回摆动,角度范围为0°~180°,周期为四秒。
3. 尝试运行Python程序 servo_PWM_GPIO_2.py[可选]
如果你希望尝试手动输入一个角度值来转动舵机,你可以试试servo_PWM_GPIO_2.py
#!/usr/bin/python
# coding:utf-8
# servo_PWM_GPIO_2.py
# 输入一个角度值,舵机将转动到对应的角度
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importing RPi.GPIO! This is probably because you need superuser privileges. "
" You can achieve this by using 'sudo' to run your script")
import time
def servo_map(before_value, before_range_min, before_range_max, after_range_min, after_range_max):
"""
功能:将某个范围的值映射为另一个范围的值
参数:原范围某值,原范围最小值,原范围最大值,变换后范围最小值,变换后范围最大值
返回:变换后范围对应某值
"""
percent = (before_value - before_range_min) / (before_range_max - before_range_min)
after_value = after_range_min + percent * (after_range_max - after_range_min)
return after_value
GPIO.setmode(GPIO.BOARD) # 初始化GPIO引脚编码方式
servo_SIG = 32
servo_VCC = 4
servo_GND = 6
servo_freq = 50
servo_time = 0.01
servo_width_min = 2.5
servo_width_max = 12.5
# servo_degree_div =servo_width_max - servo_width_min)/180
GPIO.setup(servo_SIG, GPIO.OUT)
# 如果你需要忽视引脚复用警告,请调用GPIO.setwarnings(False)
# GPIO.setwarnings(False)
servo = GPIO.PWM(servo_SIG, servo_freq) # 信号引脚=servo_SIG 频率=servo_freq in HZ
servo.start(0)
servo.ChangeDutyCycle((servo_width_min+servo_width_max)/2) # 回归舵机中位
print('预设置完成,两秒后开始等待输入')
time.sleep(2)
# 为舵机指定位置
try: # try和except为固定搭配,用于捕捉执行过程中,用户是否按下ctrl+C终止程序
while 1:
position = input("请输入0°-180°的角度值:\n")
if position.isdigit()==1:
dc = int(position)
if (dc>=0) and (dc<=180):
dc_trans=servo_map(dc, 0, 180,servo_width_min,servo_width_max)
servo.ChangeDutyCycle(dc_trans)
print("已转动到%d°处"%dc)
else:
print("Error Input:Exceed Range")
else:
print("Error Input:Not Int Input")
except KeyboardInterrupt:
pass
servo.stop() # 停止pwm
GPIO.cleanup() # 清理GPIO引脚
4.尝试整机调零[可选]
为了确保控制精度,mini pupper上的舵机组通常在使用前先进行一次调零。
试试在命令行中运行舵机调零脚本 run_set_neatral.sh
sudo ./run_set_neatral.sh
#!/usr/bin/env sh
# step 1 stop robot service
systemctl stop robot
# step 2 set neatral position
echo 1500000 > /sys/class/pwm/pwmchip0/pwm0/duty_cycle
echo "pwm 0 setting pwm off parameter --> 90 degree "
echo 1500000 > /sys/class/pwm/pwmchip0/pwm1/duty_cycle
echo "pwm 1 setting pwm off parameter --> 90 degree"
echo 500000 > /sys/class/pwm/pwmchip0/pwm2/duty_cycle
echo "pwm 2 setting pwm off parameter --> 0 degree"
echo 2500000 > /sys/class/pwm/pwmchip0/pwm3/duty_cycle
echo "pwm 3 setting pwm off parameter --> 180 degree"
sleep 1
echo "Done ! "
如果希望了解校准的详细信息,你可以查看mini pupper的官方文档:校准
确保 Mini Pupper 已预先组装好,使用GUI校准工具来优化腿部的位置。
对于每条腿,移动杆,使所有腿都成 45 度角。 腿的角度会随着滑动条在屏幕上的位置而变化。
如果它不动,则说明您执行的步骤不正确。
您可以使用 iPhone 的倾斜传感器app、尺子或量角器来测量角度。
实验总结
经过本知识点的学习和实验操作,你应该能达到以下水平:文章来源:https://www.toymoban.com/news/detail-785172.html
| 知识点 | 内容 | 了解 | 熟悉 | 掌握 |
|---|---|---|---|---|
| 舵机 | 舵机的外观及基本运动方式 | ✔ | ||
| 舵机 | 单个舵机的组成结构 | ✔ | ||
| PWM | PWM方法对舵机进行转动控制 | ✔ | ||
| 调零与校准 | mini pupper舵机组的调零与校准 | ✔ |
版权信息:教材尚未完善,此处预留版权信息处理方式
mini pupper相关内容可访问:https://github.com/mangdangroboticsclub文章来源地址https://www.toymoban.com/news/detail-785172.html
到了这里,关于实例4:树莓派GPIO控制舵机转动的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!