激光线扫相机
激光相机基于三角测量,可精确捕获3D形状(数百万个点)。更精确地说,它们的工作原理是将激光点或激光线投射到物体上,然后用传感器捕获其反射。由于传感器的位置与激光源的距离已知,因此可以通过计算激光的反射角来进行精确的点测量。有了扫描仪到物体的距离的知识,扫描硬件就可以绘制物体的表面,从而记录3D扫描。
这种方法称为三角剖分,因为激光点(或线),传感器和激光发射器形成一个三角形,如下图所示。市场上有许多不同类型的激光扫描仪,您可以在手持设备,台式设备或专业 /工业设备之间进行选择。关键是它们可以在短距离内工作。 激光还有一个强大的优点是可以在狭窄的波长范围内引导强光,因此它们几乎可以在任何环境下保持良好稳定的工作。

激光三角测量技术的优势在于其分辨率和准确性。当谈到准确性时,它大约是几十微米。
但是,您应注意,要扫描的表面的属性会影响扫描过程。因此,对于该技术而言,非常光泽或透明的表面可能存在问题。
结构光相机
如今,许多用于3D相机的手持式3D扫描仪都使用结构光技术。该技术也使用三角三角测量法,但是通过将光的图案投射到要扫描的对象而不是激光线(或点)上来工作。使用LCD投影仪或其他稳定光源将图案投影到物体上。一个或多个传感器(或相机)与投影仪略有偏移,它们会观察光的图案形状并计算视野中每个点的距离。扫描过程中使用的结构光可以是白色或蓝色,并且光的图案通常由一系列条纹组成,但也可以由点矩阵或其他形状组成。
这种类型的设备就像激光扫描仪在短距离上工作一样,可以手持或安装在三脚架上。

结构光技术的好处是扫描速度快。可以在大约2秒钟内完成扫描,并且扫描面积也很大。就像激光扫描仪一样,结构化光扫描仪也非常精确并且具有高分辨率。
结构光相机的缺点之一是它们对给定环境中的光照条件敏感。而对于激光相机而言,则可以很好的胜任工作。激光可以在狭窄的波长范围内引导强光,因此它们几乎可以在任何环境下Z佳工作。 在近距离的扫描中,微链WeRobotics激光相机还可以胜任类似玻璃这种高透光和反光的物体。整体而言,激光相机的应用场景和鲁棒性会更好。
总结
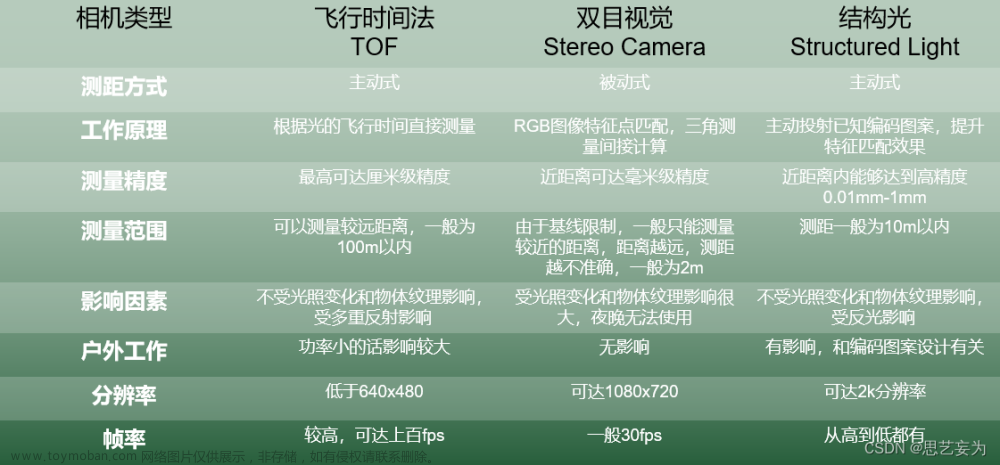
目前主流的3D相机技术路线包含结构光、双目立体、TOF、线激光。
结构光的测量精度较高可达毫米至亚毫米等级,因此在消费级和工业级场景皆有广泛应用。消费级场景如手机前置摄像头、刷脸支付、智能门锁的人脸辨识;工业级应用场景也十分多元,除了配合机器人执行抓取、上下料、各种工艺操作,也能用于外观质量检测、体积测量等对精度要求较高的工业场景。
一般而言,线激光的精度较前三种精度更高,通常可达微米级别,因此激光3D相机可广泛应用于3C电子、汽车零部件、锂电池、半导体等高精密制造场景的外观检测、体积测量;部分也可结合机械臂进行复杂的轨迹引导。

---
参考文献文章来源:https://www.toymoban.com/news/detail-785610.html
https://www.welinkirt.com/news/zixuns/300.html文章来源地址https://www.toymoban.com/news/detail-785610.html
到了这里,关于3D激光线扫相机与结构光相机的区别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!