学习目标
- 可以通过MPU6050获取加速度信息
- 可以通过DMP库获取角度信息
学习内容
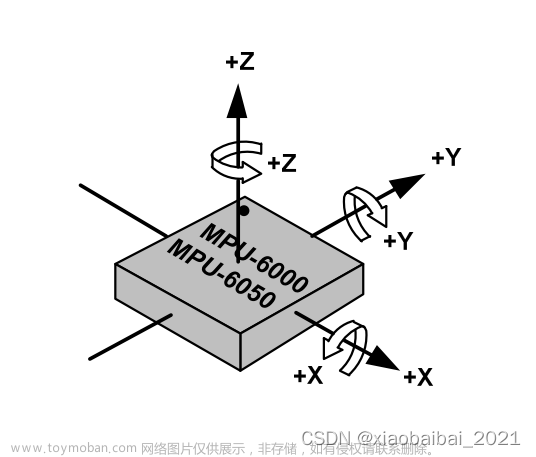
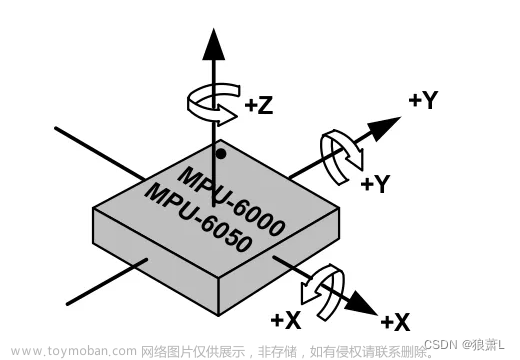
MPU6050
MPU6050是一种常用的集成电路(IC),结合了3轴陀螺仪和3轴加速度计。它用于各种需要运动跟踪和感应的电子项目和设备。MPU6050由英飞凌科技公司(InvenSense)制造,现在已被TDK收购。它的一些主要特点包括:
- 3轴陀螺仪:测量角速度,单位为每秒度。
- 3轴加速度计:测量三个方向的加速度。
- 数字运动处理器(DMP):对原始传感器数据执行复杂的计算。
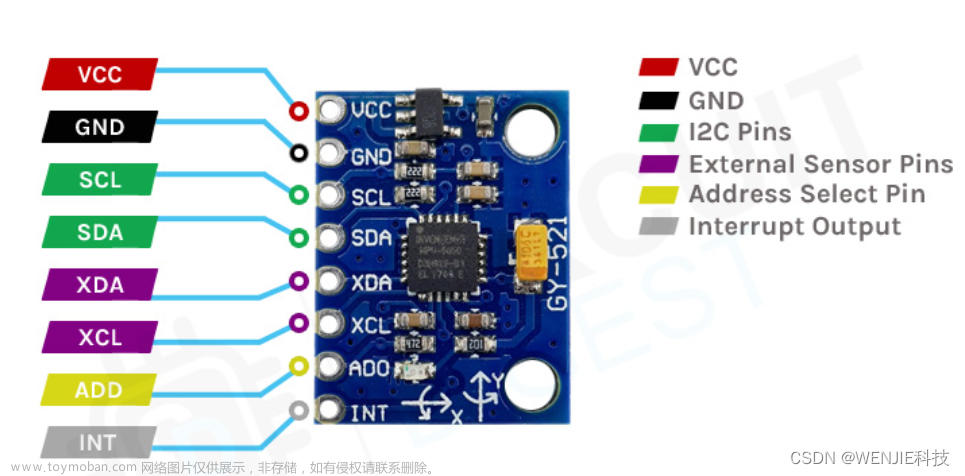
- I2C通信接口:可以与微控制器和其他数字设备轻松集成。
MPU6050在涉及运动跟踪、手势识别和定向检测的项目中很受欢迎。它通常用于无人机、机器人、游戏和虚拟现实系统,以及各种消费电子设备中。开发人员和爱好者经常将MPU6050与Arduino、树莓派和其他嵌入式系统集成,以创建各种运动感应应用程序。文章来源:https://www.toymoban.com/news/detail-785640.html
在MPU6050中,DMP代表数字运动处理器(Digital Motion Processor)。DMP是一个处理器,内置在MPU6050中,用于处理原始的陀螺仪和加速度计数据。它可以执行复杂的运动处理算法,如姿态估计、运动追踪和运动补偿文章来源地址https://www.toymoban.com/news/detail-785640.html
到了这里,关于平衡小车——陀螺仪的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!