工业相机二次开发是机器视觉行业必不可少的技能之一。
而如何实现一个框架,能够兼容所有工业相机二次开发,从而支持多种类型的工业相机,就是机器视觉行业的进阶技能了。
重明工业相机二次开发项目就是在实现相机二开框架的基础上,完成了海康工业相机的二次开发。
项目源码下载地址:
https://www.roundvision.cc/softwaredevelopment/qt/chongming/
技术栈:
1、C++
2、 QT 5.14.2
3、Opencv 4.5.5
4、工业相机SDK二次开发
重明工业相机二次开发项目框架如下图所示:
整个项目分前端部分的界面设计,和后端部分的工业相机框架设计。
1、界面GUI实现
重明的界面实现非常简洁,主要为三个部分:
左侧的相机列表,中间的图像显示,右侧的相机参数属性列表。
控制窗口的实现非常简单,其实就是一排按钮加一个QListWidget列表,用来显示所有检测到的工业相机。
视觉窗口用来显示图像,采用QT的视图模型框架,采用QGrapicsScene来实现的。
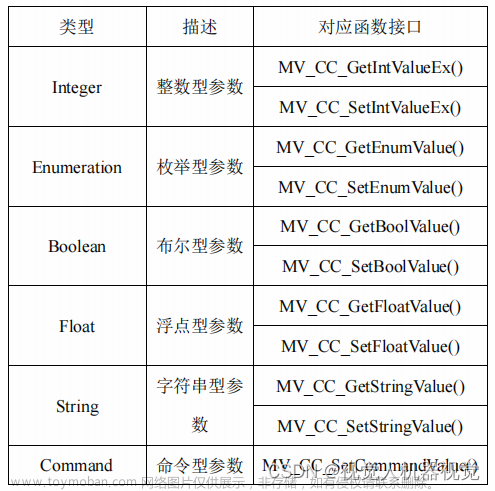
属性窗口主要涉及到了QT的MVD框架,即Model-View-Delegate框架,模型-视图-代理,通过视图代理,完成了对各个不同属性参数类型的支持,完成了相机参数属性Int,double,bool,cmd,string等多种类型的显示。
2、后端框架接口
实现了前端界面,现在我们可以考虑,如何抽象工业相机接口类,实现对不同工业相机的无差别接入,达到工业相机二次开发框架的效果呢?
这里可以借用QT插件的便利性,来设计工业相机抽象插件接口:
//相机接口类
class CameraInterface
{
public:
CameraInterface(const CameraMetaInfo& info)
{
m_cameraInfo = info;
}
virtual ~CameraInterface() {}
//获取相机用户定义名称
virtual std::string UserName()
{
return m_cameraInfo.UserDefineID;
}
//获取相机序列号
virtual std::string Serial()
{
return m_cameraInfo.Serial;
}
//获取相机参数列表
virtual uint32_t getParamList(std::vector<CameraParam>& paramList) = 0;
//判断相机是否连接
virtual bool isConnect() = 0;
//判断相机是否拉流
virtual bool isGrabbing() = 0;
//初始化相机对象
virtual uint32_t acquire() = 0;
//释放相机
virtual uint32_t release() = 0;
//连接相机
virtual uint32_t connect() = 0;
//断开连接
virtual uint32_t disconnect() = 0;
//创建拉流资源
virtual uint32_t creatStream() = 0;
//销毁拉流资源
virtual uint32_t destroyStream() = 0;
//开启拉流
virtual uint32_t startGrabbing() = 0;
//停止拉流
virtual uint32_t stopGrabbing() = 0;
//导入配置文件
virtual uint32_t loadConfig(const std::string path) = 0;
//导出配置文件
virtual uint32_t saveConfig(const std::string path) = 0;
//获取配置文件格式
virtual std::string configFormat() = 0;
//读取相机参数
virtual uint32_t readParam(CameraParam& param) = 0;
//写入相机参数
virtual uint32_t writeParam(CameraParam& param) = 0;
//获取实时图像
virtual uint32_t getImageLast(cv::Mat& image) = 0;
//获取图像队列
virtual CameraImageQueue& ImageQueue()
{
return m_imageQueue;
}
protected:
CameraImageQueue m_imageQueue;//图像队列
std::vector<CameraParam> m_cameraParams;//相机参数列表
CameraMetaInfo m_cameraInfo;//相机元信息
};
通过抽象设计统一的相机行为接口,在通过层层封装,即可达到框架效果。
如何实现相机图像队列
相机出图速度是有差异的,而我们处理相机出图也会有所耗时,如果你是出一张图像处理一张,然后再去拿一张图像,那很容易造成丢帧的问题。所以设计一个缓冲队列是非常有必要的。
我们的图像队列内部会包含两个队列,一个空闲队列,一个工作队列。
在我们相机图像队列这个应用场景下,生产者就是相机SDK的回调函数,该回调函数会生成相机的原始图像数据,我们在回调函数内将原始图像数据加入到队列中。
加入到队列是先看空闲队列有没有位置,如果有则加入到空闲队列,然后触发信号量激活消费者。如果空闲队列没有位置,则从工作队列取出最旧的图像,将原始数据加入到该位置。
我们的消费者,就是我们的取图线程,我们软件会不停的从队列中的工作队列中尝试取出图像,当工作队列为空时,会阻塞在信号量中,当生产者生产了一张图像后,会激活该信号量使取图线程取到图像。
图像队列代码实现:文章来源:https://www.toymoban.com/news/detail-785790.html
#define TIME_OUT_MS 5000 //取图超时时间
#define ImageQueueSize 10 //图像队列长度宏定义
class CameraImageQueue
{
public:
CameraImageQueue();
CameraImageQueue(int maxSize);
//向图像队列中加入图像
uint32_t Put(const cv::Mat& m);
//从图像队列中取出图像
uint32_t Take(cv::Mat& m);
//队列是否为空
bool Empty();
//队列是否为满
bool Full();
//队列当前长度
size_t Size();
private:
bool isFull() const
{
bool full = workImageQueue.size() >= m_queueSize;
return full;
}
bool isEmpty() const
{
bool empty = workImageQueue.empty();
return empty;
}
bool NotFull() const
{
bool full = workImageQueue.size() >= m_queueSize;
return !full;
}
bool NotEmpty() const
{
bool empty = workImageQueue.empty();
return !empty;
}
private:
std::mutex m_mutex;
std::condition_variable m_condition;
std::queue<cv::Mat> freeImageQueue;//空闲队列
std::queue<cv::Mat> workImageQueue;//工作队列
uint8_t m_queueSize;
bool m_needStop;
};
THE END
项目源码下载地址:
https://www.roundvision.cc/softwaredevelopment/qt/chongming/
项目由丰富的视频教程,见BiliBili:
视频链接:https://www.bilibili.com/video/BV1pp4y1n7X9文章来源地址https://www.toymoban.com/news/detail-785790.html
到了这里,关于【重明】机器视觉QT/C++实现工业相机二次开发框架的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!