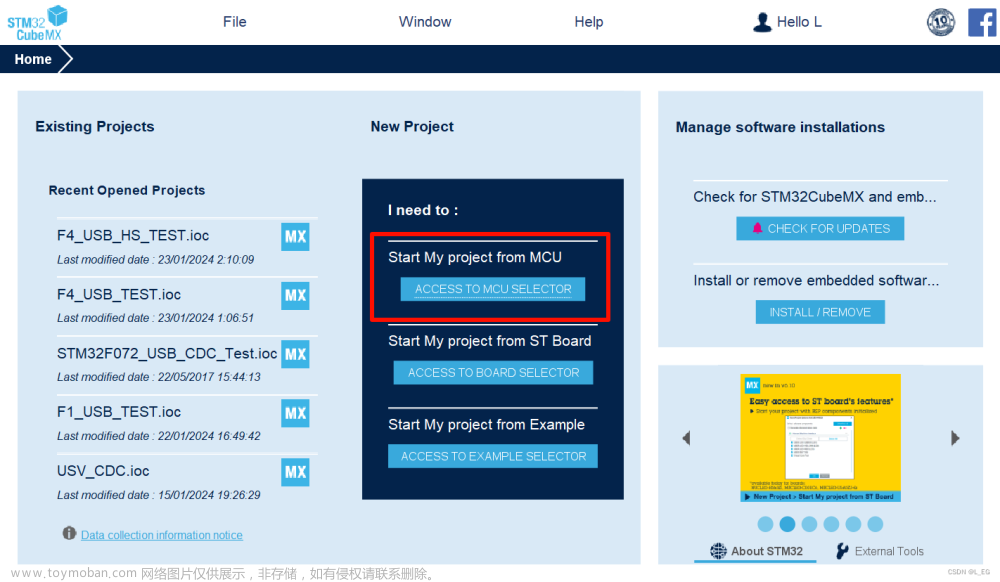
STM32实现USB转TTL串口工具
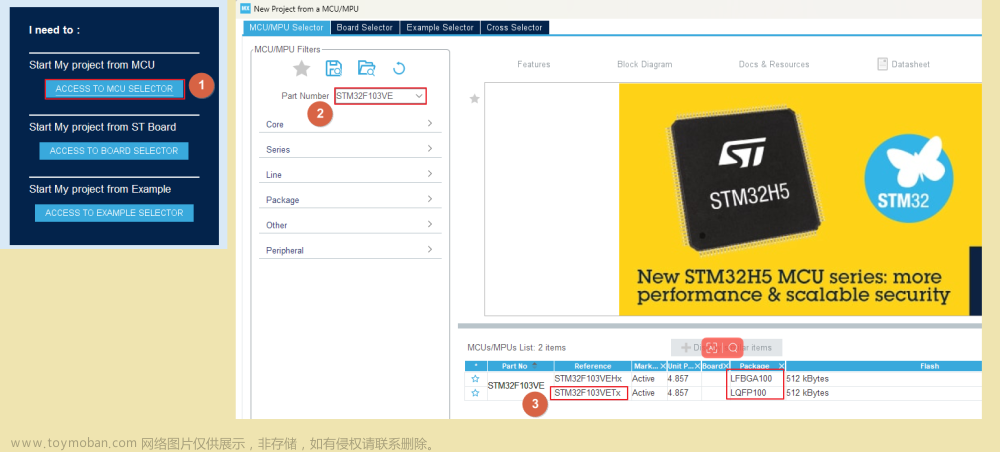
具有USB接口和UART接口的STM32芯片,如STM32F1, STM32F4等等,都可以实现USB转TTL串口工具的制作。目前具有USB接口的最小资源的芯片是STM32F103C6T6。这里介绍USB转UART的代码设计。
STM32例化的USB VCOM,数据通讯到STM32内部设定的缓存空间,如果不向外部进行UART转发,则VCOM的波特率为名义上的波特率,实际上是按照USB接口自动协商的差分速率在进行数据传输。在向外部进行UART转发时,UART的波特率可以单独配置,并不需要和VCOM端配置的名义上的波特率相同。而在向外部进行UART转发,且UART的波特率与VCOM的波特率一致时,也就实现了USB转TTL串口工具,设计的要点一是将USB传递的VCOM波特率信息,用于配置转发的UART的波特率;二是通过中断,DMA和缓存方式的配合,实现有效的时序转发。
如下介绍基本的USB转TTL串口转发逻辑设计,一些高级串口控制功能可以根据需要增加调整。
STM32工程配置
首先建立基本工程并配置时钟:
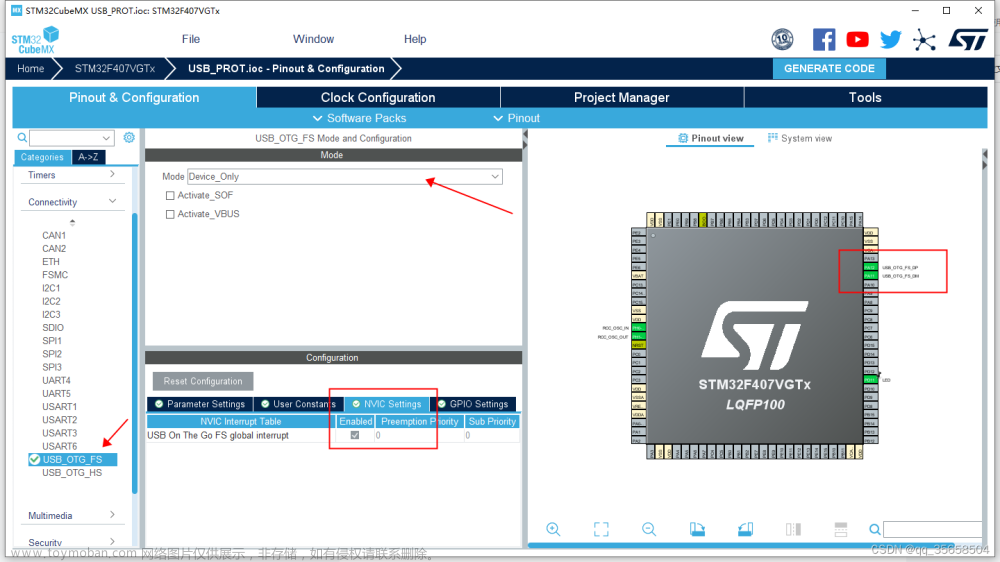
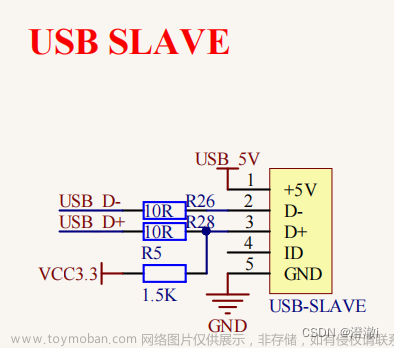
配置USB VCOM:




配置UART1作为转发串口:



保存并生成初始工程代码:
STM32工程代码
首先在usbd_cdc_if.c修改代码获取VCOM配置信息(事件自动触发)并重新配置转发串口UART1的波特率:
在重新配置转发串口UART1的波特率后,修改识别标识,main.c主程序里识别后开启UART1的单字节中断接收,并采用缓存方式解决通过USB VCOM转发未完成而UART1继续接收到数据的情况。当主程序里识别到UART1缓存区域有数据,则转存后通过USB VCOM发送出去,并修改UART1接收缓存区接收索引位置。
USB VCOM收到的数据,通过UART1的发送DMA方式发送出去。并且通过UART1的发送完成中断进行标识设置,代码通过缓存方式解决USB VCOM收到新的数据而UART1的数据发送未完成的情况。
usbd_cdc_if.c修改后的完整实现代码:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : usbd_cdc_if.c
* @version : v2.0_Cube
* @brief : Usb device for Virtual Com Port.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usbd_cdc_if.h"
/* USER CODE BEGIN INCLUDE */
#include "main.h"
/* USER CODE END INCLUDE */
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
USBD_CDC_LineCodingTypeDef LineCoding =
{
115200, /* Baud-rate:115200*/
0x00, /* Stop Bit:1*/
0x00, /* Verification: none*/
0x08 /* Data bits: 8*/
};
void ComPort_Config(void)
{
extern UART_HandleTypeDef huart1;
extern uint8_t uart1_reconfig_flag;
if(HAL_UART_DeInit(&huart1) != HAL_OK)
{
/* Initialization Error */
Error_Handler();
}
/* set the Stop bit */
switch (LineCoding.format)
{
case 0:
huart1.Init.StopBits = UART_STOPBITS_1;
break;
case 2:
huart1.Init.StopBits = UART_STOPBITS_2;
break;
default :
huart1.Init.StopBits = UART_STOPBITS_1;
break;
}
/* set the parity bit*/
switch (LineCoding.paritytype)
{
case 0:
huart1.Init.Parity = UART_PARITY_NONE;
break;
case 1:
huart1.Init.Parity = UART_PARITY_ODD;
break;
case 2:
huart1.Init.Parity = UART_PARITY_EVEN;
break;
default :
huart1.Init.Parity = UART_PARITY_NONE;
break;
}
/*set the data type : only 8bits and 9bits is supported */
switch (LineCoding.datatype)
{
case 0x07:
/* With this configuration a parity (Even or Odd) must be set */
huart1.Init.WordLength = UART_WORDLENGTH_8B;
break;
case 0x08:
if(huart1.Init.Parity == UART_PARITY_NONE)
{
huart1.Init.WordLength = UART_WORDLENGTH_8B;
}
else
{
huart1.Init.WordLength = UART_WORDLENGTH_9B;
}
break;
default :
huart1.Init.WordLength = UART_WORDLENGTH_8B;
break;
}
huart1.Init.BaudRate = LineCoding.bitrate;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if(HAL_UART_Init(&huart1) != HAL_OK)
{
/* Initialization Error */
Error_Handler();
}
uart1_reconfig_flag = 1;
}
/* USER CODE END PV */
/** @addtogroup STM32_USB_OTG_DEVICE_LIBRARY
* @brief Usb device library.
* @{
*/
/** @addtogroup USBD_CDC_IF
* @{
*/
/** @defgroup USBD_CDC_IF_Private_TypesDefinitions USBD_CDC_IF_Private_TypesDefinitions
* @brief Private types.
* @{
*/
/* USER CODE BEGIN PRIVATE_TYPES */
/* USER CODE END PRIVATE_TYPES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Defines USBD_CDC_IF_Private_Defines
* @brief Private defines.
* @{
*/
/* USER CODE BEGIN PRIVATE_DEFINES */
/* USER CODE END PRIVATE_DEFINES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Macros USBD_CDC_IF_Private_Macros
* @brief Private macros.
* @{
*/
/* USER CODE BEGIN PRIVATE_MACRO */
/* USER CODE END PRIVATE_MACRO */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Variables USBD_CDC_IF_Private_Variables
* @brief Private variables.
* @{
*/
/* Create buffer for reception and transmission */
/* It's up to user to redefine and/or remove those define */
/** Received data over USB are stored in this buffer */
uint8_t UserRxBufferFS[APP_RX_DATA_SIZE];
/** Data to send over USB CDC are stored in this buffer */
uint8_t UserTxBufferFS[APP_TX_DATA_SIZE];
/* USER CODE BEGIN PRIVATE_VARIABLES */
/* USER CODE END PRIVATE_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Exported_Variables USBD_CDC_IF_Exported_Variables
* @brief Public variables.
* @{
*/
extern USBD_HandleTypeDef hUsbDeviceFS;
/* USER CODE BEGIN EXPORTED_VARIABLES */
/* USER CODE END EXPORTED_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_FunctionPrototypes USBD_CDC_IF_Private_FunctionPrototypes
* @brief Private functions declaration.
* @{
*/
static int8_t CDC_Init_FS(void);
static int8_t CDC_DeInit_FS(void);
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length);
static int8_t CDC_Receive_FS(uint8_t* pbuf, uint32_t *Len);
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
/**
* @}
*/
USBD_CDC_ItfTypeDef USBD_Interface_fops_FS =
{
CDC_Init_FS,
CDC_DeInit_FS,
CDC_Control_FS,
CDC_Receive_FS
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes the CDC media low layer over the FS USB IP
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Init_FS(void)
{
/* USER CODE BEGIN 3 */
/* Set Application Buffers */
USBD_CDC_SetTxBuffer(&hUsbDeviceFS, UserTxBufferFS, 0);
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, UserRxBufferFS);
return (USBD_OK);
/* USER CODE END 3 */
}
/**
* @brief DeInitializes the CDC media low layer
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_DeInit_FS(void)
{
/* USER CODE BEGIN 4 */
return (USBD_OK);
/* USER CODE END 4 */
}
/**
* @brief Manage the CDC class requests
* @param cmd: Command code
* @param pbuf: Buffer containing command data (request parameters)
* @param length: Number of data to be sent (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length)
{
/* USER CODE BEGIN 5 */
switch(cmd)
{
case CDC_SEND_ENCAPSULATED_COMMAND:
break;
case CDC_GET_ENCAPSULATED_RESPONSE:
break;
case CDC_SET_COMM_FEATURE:
break;
case CDC_GET_COMM_FEATURE:
break;
case CDC_CLEAR_COMM_FEATURE:
break;
/*******************************************************************************/
/* Line Coding Structure */
/*-----------------------------------------------------------------------------*/
/* Offset | Field | Size | Value | Description */
/* 0 | dwDTERate | 4 | Number |Data terminal rate, in bits per second*/
/* 4 | bCharFormat | 1 | Number | Stop bits */
/* 0 - 1 Stop bit */
/* 1 - 1.5 Stop bits */
/* 2 - 2 Stop bits */
/* 5 | bParityType | 1 | Number | Parity */
/* 0 - None */
/* 1 - Odd */
/* 2 - Even */
/* 3 - Mark */
/* 4 - Space */
/* 6 | bDataBits | 1 | Number Data bits (5, 6, 7, 8 or 16). */
/*******************************************************************************/
case CDC_SET_LINE_CODING: //Get info from PC
LineCoding.bitrate = (uint32_t)(pbuf[0] | (pbuf[1] << 8) |\
(pbuf[2] << 16) | (pbuf[3] << 24));
LineCoding.format = pbuf[4];
LineCoding.paritytype = pbuf[5];
LineCoding.datatype = pbuf[6];
ComPort_Config();//re-config serial port
break;
case CDC_GET_LINE_CODING: //For PC to get info
pbuf[0] = (uint8_t)(LineCoding.bitrate);
pbuf[1] = (uint8_t)(LineCoding.bitrate >> 8);
pbuf[2] = (uint8_t)(LineCoding.bitrate >> 16);
pbuf[3] = (uint8_t)(LineCoding.bitrate >> 24);
pbuf[4] = LineCoding.format;
pbuf[5] = LineCoding.paritytype;
pbuf[6] = LineCoding.datatype;
break;
case CDC_SET_CONTROL_LINE_STATE:
break;
case CDC_SEND_BREAK:
break;
default:
break;
}
return (USBD_OK);
/* USER CODE END 5 */
}
/**
* @brief Data received over USB OUT endpoint are sent over CDC interface
* through this function.
*
* @note
* This function will issue a NAK packet on any OUT packet received on
* USB endpoint until exiting this function. If you exit this function
* before transfer is complete on CDC interface (ie. using DMA controller)
* it will result in receiving more data while previous ones are still
* not sent.
*
* @param Buf: Buffer of data to be received
* @param Len: Number of data received (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len)
{
/* USER CODE BEGIN 6 */
static uint8_t Buff[1024];
static uint32_t Buff_index = 0;
extern UART_HandleTypeDef huart1;
extern uint8_t uart1_txdone_flag;
if(uart1_txdone_flag==1)
{
uart1_txdone_flag = 0;
memcpy(Buff+Buff_index, Buf, *Len); //Single frame data receiving
Buff_index += *Len;
uint8_t Buff_t[1024];
memcpy(Buff_t, Buff, Buff_index); //Whole data shift for buffer protection
HAL_UART_Transmit_DMA(&huart1, Buff_t, Buff_index);
Buff_index = 0;
}
else
{
memcpy(Buff+Buff_index, Buf, *Len); //Single frame data receiving
Buff_index += *Len;
}
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);
USBD_CDC_ReceivePacket(&hUsbDeviceFS);
return (USBD_OK);
/* USER CODE END 6 */
}
/**
* @brief CDC_Transmit_FS
* Data to send over USB IN endpoint are sent over CDC interface
* through this function.
* @note
*
*
* @param Buf: Buffer of data to be sent
* @param Len: Number of data to be sent (in bytes)
* @retval USBD_OK if all operations are OK else USBD_FAIL or USBD_BUSY
*/
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len)
{
uint8_t result = USBD_OK;
/* USER CODE BEGIN 7 */
USBD_CDC_HandleTypeDef *hcdc = (USBD_CDC_HandleTypeDef*)hUsbDeviceFS.pClassData;
if (hcdc->TxState != 0){
return USBD_BUSY;
}
USBD_CDC_SetTxBuffer(&hUsbDeviceFS, Buf, Len);
result = USBD_CDC_TransmitPacket(&hUsbDeviceFS);
/* USER CODE END 7 */
return result;
}
/* USER CODE BEGIN PRIVATE_FUNCTIONS_IMPLEMENTATION */
/* USER CODE END PRIVATE_FUNCTIONS_IMPLEMENTATION */
/**
* @}
*/
/**
* @}
*/
main.c的完整实现代码:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usb_device.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len);
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
uint8_t uart1_rxbyte;
uint8_t uart1_rxd[1024];
uint8_t uart1_txd[1024];
uint32_t uart1_rx_index = 0;
uint32_t uart1_rx_index_t = 0;
uint8_t uart1_reconfig_flag = 0;
uint8_t uart1_txdone_flag = 1; //0: TX ongoing; 1: TX idle;
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_tx;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USB_DEVICE_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_UART_Receive_IT(&huart1, &uart1_rxbyte, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(uart1_reconfig_flag==1)
{
uart1_reconfig_flag = 0;
HAL_UART_Receive_IT(&huart1, &uart1_rxbyte, 1); //Start receiving after port re-config
}
if(uart1_rx_index!=0)
{
memcpy(uart1_txd, uart1_rxd, uart1_rx_index); //Copy data
uart1_rx_index_t = uart1_rx_index; //Copy length
uart1_rx_index = 0; //Receiving index adjustment for new coming data
while (CDC_Transmit_FS(uart1_txd, uart1_rx_index_t)==USBD_BUSY) PY_Delay_us_t(1); //Send data to USB
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USB;
PeriphClkInit.UsbClockSelection = RCC_USBCLKSOURCE_PLL_DIV1_5;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart1)
{
uart1_rxd[uart1_rx_index++]=uart1_rxbyte;
HAL_UART_Receive_IT(&huart1, &uart1_rxbyte, 1);
}
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
uart1_txdone_flag = 1;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
编译下载后即实现了USB转TTL串口工具。
STM32代码测试
将UART1的收发管脚短接,实现环回场景并行发收测试,连接STM32的USB到PC,打开串口工具进行发收测试,效果如下:
STM32例程下载
STM32F103C6T6 USB转TTL串口例程
STM32F401CCU6 USB转TTL串口例程
扩展模式
增加UART转RS232芯片(MAX3232)电路后,也就成为了USB转RS232串口工具
也可以修改逻辑实现USB转RS422, RS485, CAN等工具文章来源:https://www.toymoban.com/news/detail-786483.html
–End–文章来源地址https://www.toymoban.com/news/detail-786483.html
到了这里,关于STM32实现USB转TTL串口工具的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!