⛄一、模型预测控制MPC无人驾驶车辆轨迹跟踪简介
1 模型预测控制原理
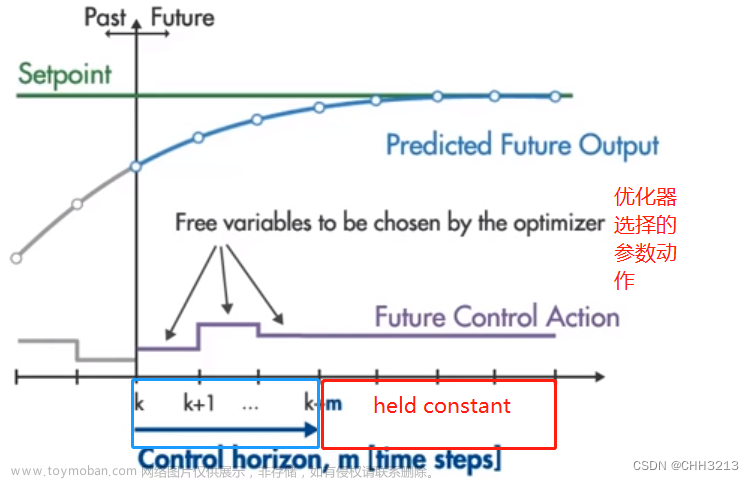
模型预测控制(MPC)的最核心思想就是利用三维的空间模型加上时间构成四维时空模型,然后在这个时空模型的基础上,求解最优控制器。MPC控制器基于一段时间的时空模型,因此得到的控制输出也是系统在未来有限时间步的控制序列。 由于,理论构建的模型与系统真实模型都有误差;从而,更远未来的控制输出对系统控制的价值很低,MPC仅执行输出序列的中第一个控制输出。模型预测控制(以下简称 MPC)是一种依赖于系统模型进行数学优化的复杂控制器。它利用优化算法计算有限时间范围内一系列的控制输入序列,并优化该序列,但控制器仅执行序列中的第一组控制输入,然后再次重复该循环。MPC 主要分为 3 个关键步骤:模型预测、滚动优化、反馈校正。
2 MPC在轨迹跟踪过程中的应用
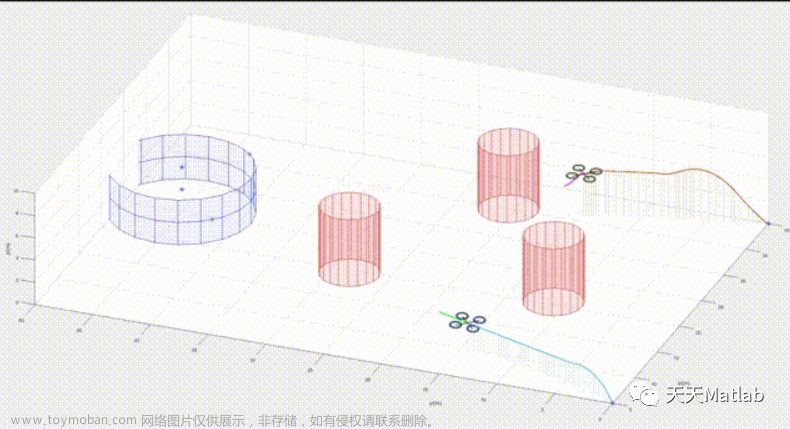
在轨迹跟踪应用领域,通常 MPC 建模可根据机器人的控制方式选择基于运动学运动状态方程建模或者基于动力学运动状态方程建模。前者是根据车辆转向的几何学角度关系和速度位置关系来建立描述车辆的运动的预测模型,一般只适用于低速运动场景;后者是对被控对象进行综合受力分析,从受力平衡的角度建模,一般应用在高速运动场景,如汽车无人驾驶。本文基于双轮差速运动学模型,推导实现差速运动的MPC轨迹跟踪控制。 双轮差速运动学线性 MPC 轨迹跟踪实现的基本思路是状态方程–线性化–离散化–预测方程–约束线性化–非线性目标函数转为二次规划–求解最优问题。其中线性化可采用泰勒级数展开忽略高次项的方式,离散化可采用后向差分法,这两个部分都有一定的模型精度丢失。文章来源:https://www.toymoban.com/news/detail-786578.html
⛄二、部分源代码
clc;
clear all;文章来源地址https://www.toymoban.com/news/detail-786578.html
到了这里,关于【轨迹跟踪】MPC模型无人机轨迹跟踪【含Matlab源码 3500期】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!