小伙伴们,我们又来了。上期大概介绍了EtherCAT的一些特性,本期我们将会更详细的介绍一下EtherCAT的实现方式,通信周期的意义到底是什么、SDO和PDO到底是什么等概念。
首先要声明,尽管本期介绍略微深入,实际上小伙伴使用正运动控制器的时候是非常简单的,你完全可以不了解下面的概念就可以充分利用正运动在总线上的多种优势,这篇文章是为感兴趣,想了解更多的小伙伴写的。只有了解更多,才能解决复杂问题哦。
ZMC408CE | 实现“8通道独立PSO”应用场景
说到EtherCAT总线控制器,这里为大家介绍一款正运动技术推出的高性能EtherCAT总线运动控制器ZMC408CE。
ZMC408CE核心技术采用了先进的FPGA技术,实现硬件位置比较输出、精准输出功能,保证连续轨迹加工的出色性能和稳定性,以及动态数据捕获的实时性,从而实现更加精准控制和提高生产效率和品质。
ZMC408CE支持EtherCAT+脉冲轴混合插补,可脱机或联机运行,轴数8-32轴可选,支持ZDevelop+多种高级上位机混合编程,可以实现点位运动、电子凸轮、直线插补、圆弧插补、连续轨迹加工和30+种机器人模型的控制。

ZMC408CE产品亮点
1.高性能处理器,提升运算速度、响应时间和扫描周期等;
2.一维/二维/三维、多通道视觉飞拍,高速高精;
3.位置同步输出PSO,连续轨迹加工中对精密点胶胶量控制和激光能量控制等;
4.多轴同步控制,多坐标系独立控制等;
5.EtherCAT同步周期可快至125us;
6.EtherCAT总线和脉冲轴混合插补;
7.直线插补、任意空间圆弧插补、螺旋插补、样条插补等;
8.应用灵活,可PC上位机开发,也可脱机独立运行;
想要了解更多关于ZMC408CE的详情介绍,可以点击“推荐|8通道PSO的高性能EtherCAT总线运动控制器”查看。
EtherCAT设计目标和优势
工业现场往往需要稳定并且实时的通信,传感器和IO信号需要高速响应,电机的数据需要实时传输。在EtherCAT之前,就已经有CAN总线等现场总线。
但随着现场的自动化系统越来越庞大,传统总线的瓶颈就越来越明显:带宽不够高,传输数据量少,无法充分利用IT技术的发展等。所以就诞生了一批基于Ethernet的现场总线,EtherCAT就是其中的佼佼者之一。

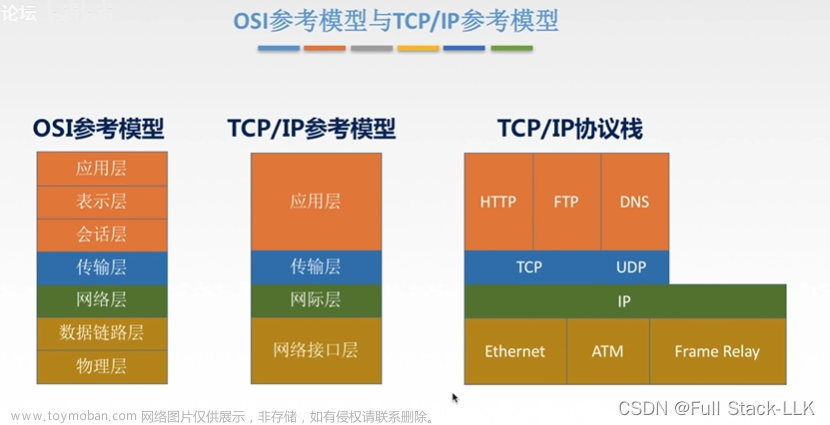
EtherCAT总线的官方描述是基于Ethernet的现场总线(如上图),为什么不直接使用Ethernet呢,因为现场通信的一些特征是和IT领域完全不同的:
1.单个系统拥有大量节点(设备)。
2.这些节点一般需要传输数据量比较少,但实时性要求很高。
如果每个节点都用一个Ethernet数据帧来通信的话,最后的通信效率就会非常的低。按照官方的一个计算示例,最终的带宽利用率可能不到5%,并且,基于Ethernet的通信协议,例如TCP,会带来额外的带宽开销和延迟,大量的带宽都被无效的数据占用。
EtherCAT的解决方法就是,所有的节点使用一个数据帧,主站发出数据帧后,所有的从站会在飞行中处理数据,读取自己需要的,塞入自己需要返回的数据,然后继续把数据帧继续向下传输,直到碰到最后一个节点,利用Ethernet的全双工特性再将数据返回给主站。
利用这种传输方式,数据帧的最大有效数据率(maximum effective data rate)可以超过90%,主站是唯一允许主动发送数据报文的设备,其他节点只能顺序传输报文,这样可以避免Ethernet网络中常见的冲突和延时,保证EtherCAT数据传输的实时特性。
并且,从站使用专用芯片(ESC)在飞行中处理数据报文时,完全使用硬件来处理, 使得整个EtherCAT网络的通信时间保持稳定可预测,和每个从站的不同部署完全无关。
EtherCAT网络中可以传输周期性的数据和非周期性的数据。
周期性数据是通过PDO(Process Data Object)来交换的,一般用于实时的数据交换,例如电机的命令位置和反馈位置,IO信号的交互等。
非周期的数据是可以通过邮箱协议来传输,最常见的就是CoE(Canopen Over EtherCAT),可以SDO(Service Data Object)来传输信息,SDO一般用于非实时的通信,例如电机参数的配置(例如分辨率, 最大电流等),包括从站的PDO配置信息也是通过SDO来传输的。
配置PDO就像为你的数据买高铁票,这样主站和从站在正式工作之前就已经提前知道了将会有哪些数据上这列高铁,每过一个从站ESC芯片将会自动取下来对应位置的数据,塞入需要返回的数据。这样可以最大化的缩减无效的数据,并且加快处理速度。


PDO信息的传输周期就是我们经常说的EtherCAT通信周期。例如正运动的常规固件默认都是1ms的周期(1K的通信频率),正运动部分产品可以设置125us的周期(8K的通信频率)。
为什么默认是1ms而不是更短的周期(更高的频率)呢?控制器在这1ms内在做什么呢?从站又在做什么呢?
这个要从CSP的工作模式和电机的控制环路说起,后面章节会再详细介绍。[一般1ms已经足够小了(1K已经足够高了)。并且,电机之间的同步不是靠数据帧的到达时间,而是靠分布式时钟的,可以实现纳秒级的同步,上期文章有介绍]。

前面提到,因为EtherCAT数据帧的独特设计,有效数据率非常高,所以在工业自动化领域可以充分利用起来Ethernet的百兆带宽,实际上百兆带宽也可以让非常多的电机实现1ms的通信周期,例如正运动家就有128轴的控制器(一般人我不告诉他哦)。
那上次留下的一个问题是,既然EtherCAT百兆总线已经这么好了,为什么还要去设计千兆和万兆总线?
答案是随着技术的发展,已经出现了更庞大更复杂的系统,例如先进的物流系统或者磁悬浮系统需要非常多的轴(几百甚至上千),并且这些轴之间需要精确同步;或者需要采集大量传感器数据的测量设备,都对总线的带宽提出了更高的要求。
更高的带宽可以让现场总线进入更多的应用领域,同样更强的总线也可以支撑设计以前没有的复杂系统。

本次,正运动技术EtherCAT和Ethernet的不同点有哪些?通信周期又是什么意思?就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。文章来源:https://www.toymoban.com/news/detail-786793.html
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。文章来源地址https://www.toymoban.com/news/detail-786793.html
到了这里,关于EtherCAT和Ethernet的不同点有哪些, 通信周期又是什么意思?的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!