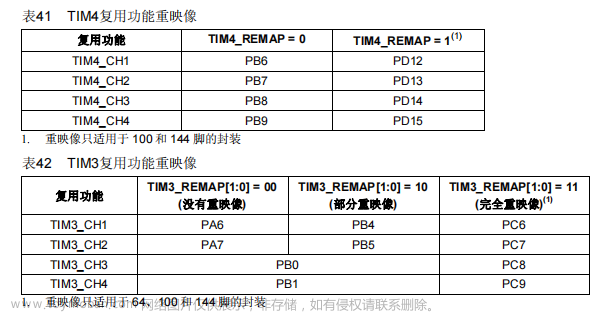
SG90舵机简介
SG90舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。


塑料齿轮SG90舵机 金属齿轮SG90舵机
SG90舵机应用
SG90舵机目前在高档遥控玩具,如航模、包括飞机模型、潜艇模型、遥控机器人中已经使用得比较普遍。
SG90舵机导线
SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),也就是地线、电源线和信号线。
SG90舵机工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
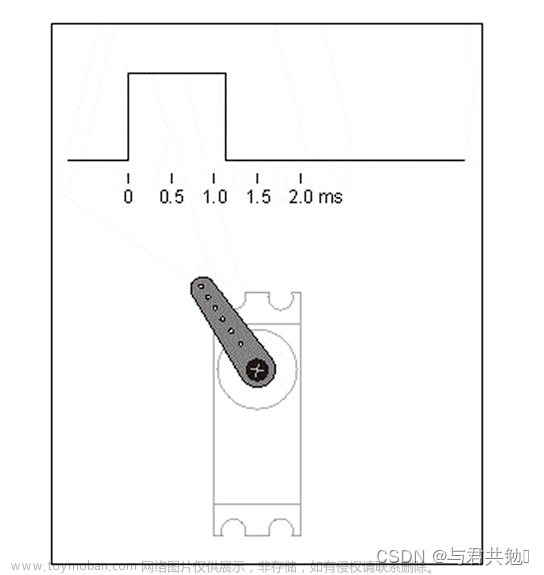
SG90舵机舵机的控制
舵机的控制一般需要一个20ms 左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180 度角度伺服为例,那么对应的控制关系是这样的:
0.5ms ---------- 0 度;
1.0ms ---------- 45 度;
1.5ms ---------- 90 度;
2.0ms ---------- 135 度;
2.5ms ---------- 180 度;
小型舵机的工作电压一般为4.8V 或6V,转速也不是很快,一般为0.22/60 度或0.18/60 度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。
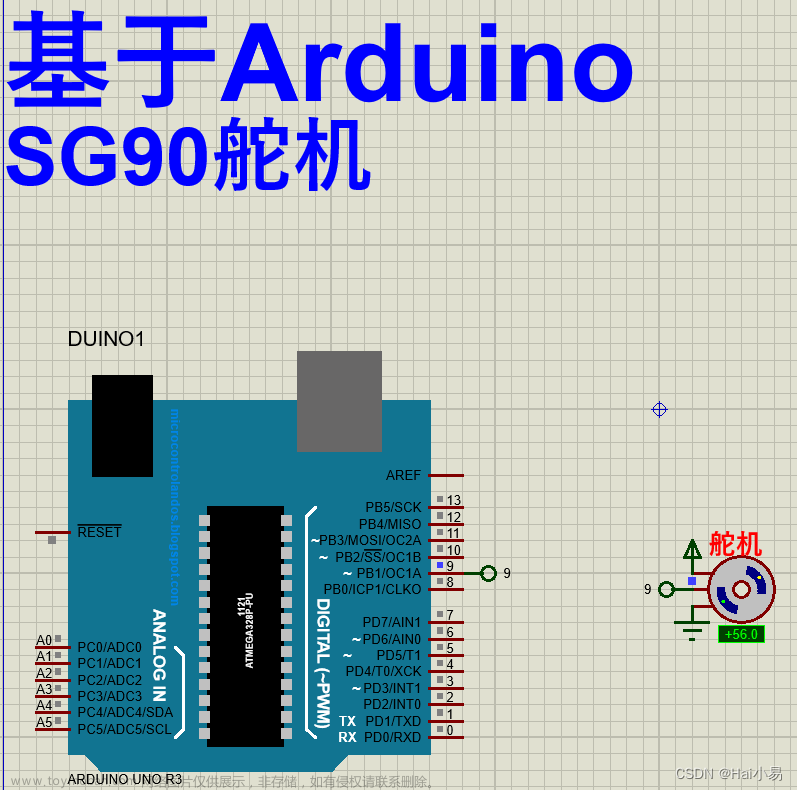
SG90舵机舵机控制例程
/************************舵机控制*************************
单片机型号:STC15W4K56S4 选择单片机内部时钟,频率为22.1184M。
舵机信号线(橙色导线)接到单片机P2.1上。
***********************************************************/
#include "stc15.h" //包含头文件stc15.h
#define Dj_Left1 2 //舵机左转角度
#define Dj_Left2 3 //舵机左转角度
#define Dj_Left3 4 //舵机左转角度
#define Dj_Left4 5 //舵机左转角度
#define Dj_Middle 6 //舵机回到中间位置
#define Dj_Right4 7 //舵机右转角度
#define Dj_Right3 8 //舵机右转角度
#define Dj_Right2 9 //舵机右转角度
#define Dj_Right1 10 //舵机右转角度
sbit ControlPort = P2^1; //舵机信号端口
void delay(unsigned int t); //delay延时函数
void delay_us(unsigned int t); //delay_us延时函数
void delay_ms(unsigned int t); //delay_ms延时函数
void DjGpio_Init(void); //舵机控制信号IO口初始化
void Timer_Init(void); //定时器初始化
void ControlLeftOrRight(void); //控制舵机函数
unsigned int TimeOutCounter = 0; //定时器溢出计数
unsigned char LeftOrRight = 0; //舵机左右旋转标志
void delay(unsigned int t) //delay延时函数
{while(t--);}
void delay_us(unsigned int t) //delay_us延时函数
{
unsigned char i;
while(t--)
{i=3;while(i--)delay(1);}
}文章来源地址https://www.toymoban.com/news/detail-787349.html
void delay_ms(unsigned int t) //delay_ms延时函数
{while(t--){delay_us(t);}}
void ControlLeftOrRight(void) //控制舵机函数
{
LeftOrRight=Dj_Middle;TimeOutCounter=0;delay_ms(500);
LeftOrRight=Dj_Left3;TimeOutCounter=0;delay_ms(500);
LeftOrRight=Dj_Right3;TimeOutCounter=0;delay_ms(500);
LeftOrRight=Dj_Middle;TimeOutCounter=0;delay_ms(500);
}
void DjGpio_Init(void) //舵机控制信号IO口初始化
{
P2M0 = (P2M0|0x02);
P2M1 = (P2M1&0xfd);
}
void Timer_Init(void) //定时器初始化
{
TMOD = TMOD|0x11;
TH1 = 0xfe; //0.25ms定时
TL1 = 0x33;
ET1 = 1;
TR1 = 1;
EA = 1; //开总中断
}
void main(void)
{
Timer_Init(); //定时器初始化
DjGpio_Init();
ControlLeftOrRight(); //控制舵机函数
while(1){;}
}
void timer1()interrupt 3 //定时器中断处理
{
TH1=0xfe;TL1=0x33; //0.25ms
TimeOutCounter++;
switch(LeftOrRight)
{
case 2: //0.5ms
{
if(TimeOutCounter<=2){ControlPort=1;}
else{ControlPort=0;}
}break;
case 3: //0.75ms
{
if(TimeOutCounter<=3){ControlPort=1;}
else{ControlPort=0;}
}break;
case 4: //1ms
{
if(TimeOutCounter<=4){ControlPort=1;}
else{ControlPort=0;}
}break;
case 5: //1.25ms
{
if(TimeOutCounter<=5){ControlPort=1;}
else{ControlPort=0;}
}break;
case 6: //1.5ms
{
if(TimeOutCounter<=6){ControlPort=1;}
else{ControlPort=0;}
}break;
case 7: //1.75ms
{
if(TimeOutCounter<=7){ControlPort=1;}
else{ControlPort=0;}
}break;
case 8: //2ms
{
if(TimeOutCounter<=8){ControlPort=1;}
else{ControlPort=0;}
}break;
case 9: //2.25ms
{
if(TimeOutCounter<=9){ControlPort=1;}
else{ControlPort=0;}
}break;
case 10: //2.5ms
{
if(TimeOutCounter<=10){ControlPort=1;}
else{ControlPort=0;}
}break;
default: break;
}
if(TimeOutCounter==80) //20ms
{TimeOutCounter=0;}文章来源:https://www.toymoban.com/news/detail-787349.html
}
到了这里,关于SG90舵机介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!