Linux查看内核版本:
uname -rLinux 发行版
使用预构建包
英特尔®实感™ SDK 2.0 为基于 Intel X86/AMD64 的 Debian 发行版提供 dpkg 格式的 Ubuntu 16/18/20/22 LTS 安装包。
实感 DKMS 内核驱动程序包 () 支持 Ubuntu LTS 内核 4.4、4.8、4.10、4.13、4.15、4.18*、5.0*、5.3*、5.4、5.13 和 5.15。有关更多详细信息,请参阅 Ubuntu 内核发布时间表。librealsense2-dkms
从源代码进行配置和构建
虽然我们强烈建议尽可能使用 DKMS 软件包,但在某些情况下,需要手动安装和修补系统:
- 将 SDK 与非 LTS Ubuntu 内核版本配合使用:**4.16**
- 将用户特定的补丁/模块与 SDK 集成。
librealsense - 调整替代内核/发行版的补丁。
这些步骤在 Linux 手动安装指南中进行了描述
安装软件包:
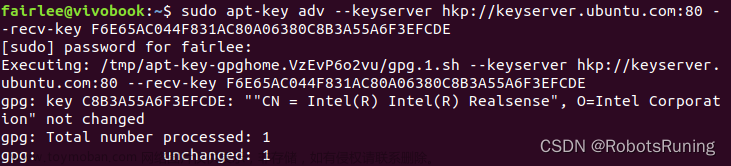
- 注册服务器的公钥:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
-
确保安装了 apt HTTPS 支持:
sudo apt-get install apt-transport-https-
将服务器添加到存储库列表:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u-
安装库(如果升级软件包,请参阅下面的部分):
上面两行将部署 librealsense2 udev 规则,构建和激活内核模块、运行时库以及可执行的演示和工具。
-
(可选)安装开发人员包和调试包:
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils-
重新连接英特尔实感深度摄像头并运行:以验证安装。
realsense-viewer -
也可通过下面命令直接查看点云信息
realsense-viewer
-
也可通过下面命令直接查看点云信息
roslaunch realsense2_camera demo_pointcloud.launch -
假设图像尺寸是640*480,帧率30Hz。由于彩色图像为3通道,每通道8位,那么每秒的字节数就是:640*480*3*30 = 27648000(B),换算成MB(除以两次1024)得到带宽:26.37MB/s。
-
深度图像为单通道,每通道16位,每秒的字节数就是:640*480*2*30 = 18432000(B),则带宽为:17.57MB/s。
通过以下命令查看原始图片的带宽:
rostopic bw /camera/color/image_raw rostopic bw /camera/depth/image_rect_raw

方法二https://github.com/IntelRealSense/realsense-ros/tree/ros1-legacy文章来源:https://www.toymoban.com/news/detail-788120.html
问题https://github.com/IntelRealSense/realsense-ros/issues/708解决办法https://github.com/IntelRealSense/realsense-ros/tree/ros1-legacy文章来源地址https://www.toymoban.com/news/detail-788120.html
到了这里,关于GItHUB push 下来的 Realsense-ros包,使用IntelRealSense的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!