测试新开源的激光SLAM回环检测算法“STD: A Stable Triangle Descriptor for 3D place recognition”
-
最近林博新开源了一个回环检测算法,我将其集成到自己常用的建图定位框架中检测效果。
-
原算法开源地址:“GitHub - hku-mars/STD: A 3D point cloud descriptor for place recognition”
-
自己测试的代码地址: “https://gitee.com/lxyzs/slam-demo/tree/loop_closing”
-
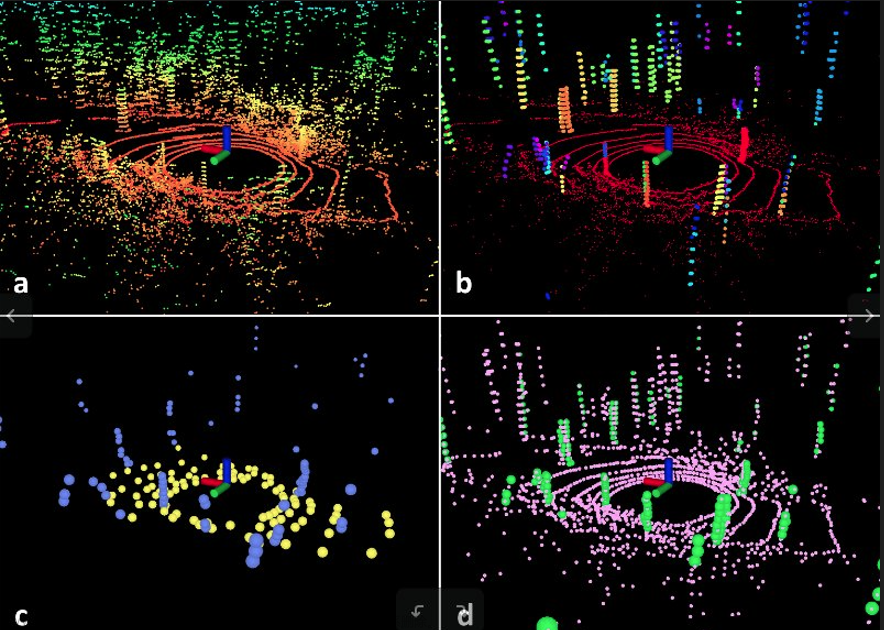
自己测的效果还不错,如图:

 文章来源:https://www.toymoban.com/news/detail-788785.html
文章来源:https://www.toymoban.com/news/detail-788785.html
文章来源地址https://www.toymoban.com/news/detail-788785.html
到了这里,关于测试新开源的激光SLAM回环检测算法“STD A Stable Triangle Descriptor for 3D place recognition”的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!