前面介绍了机器人的逆运动学解法又几何法和代数法得到的都是机器人逆运动学的解析解,但是由于解析解可能不存在,所以需要寻求新的方法。这里介绍速度级的雅克比方法(Jacobian)。雅克比方法求机器人的运动学逆解对于不同类型的机械臂求解过程是相同的,而且不要求机械臂的逆解的解析解存在,通用性较强。然而,它的缺点是计算量大、速度慢。
一、雅克比矩阵的定义:
雅克比矩阵是多维形式的导数。如假设有6个函数,每个函数都有6个独立的变量:


在机器人运动学中雅可比矩阵的数学意义是,表示机器人关节速度到机器人操作速度的广义传动比或映射关系。

对于任意机器人的雅可比矩阵可以写成如下形式:

(n即是关节数)

机器人雅可比矩阵的计算方法有矢量积方法、微分变换法等(具体参见,战强-机器人学P102,https://blog.csdn.net/hitgavin/article/details/107504032)文章来源:https://www.toymoban.com/news/detail-788982.html
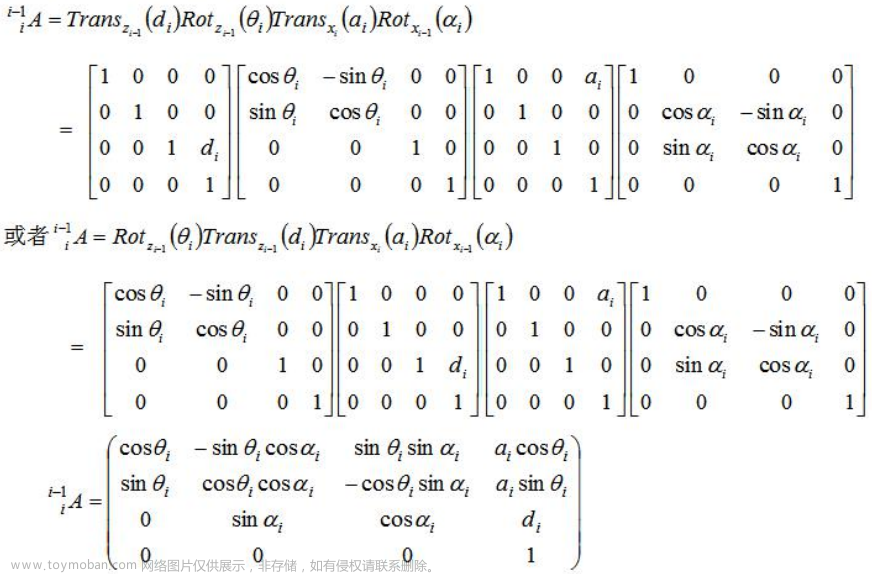
这里给出的是矢量积方法公式(适用于标准DH参数建模),对于旋转关节文章来源地址https://www.toymoban.com/news/detail-788982.html
到了这里,关于(7)机械臂的速度雅克比矩阵的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![[足式机器人]Part3机构运动微分几何学分析与综合Ch03-1 空间约束曲线与约束曲面微分几何学——【读书笔记】](https://imgs.yssmx.com/Uploads/2024/02/677088-1.png)