开发环境
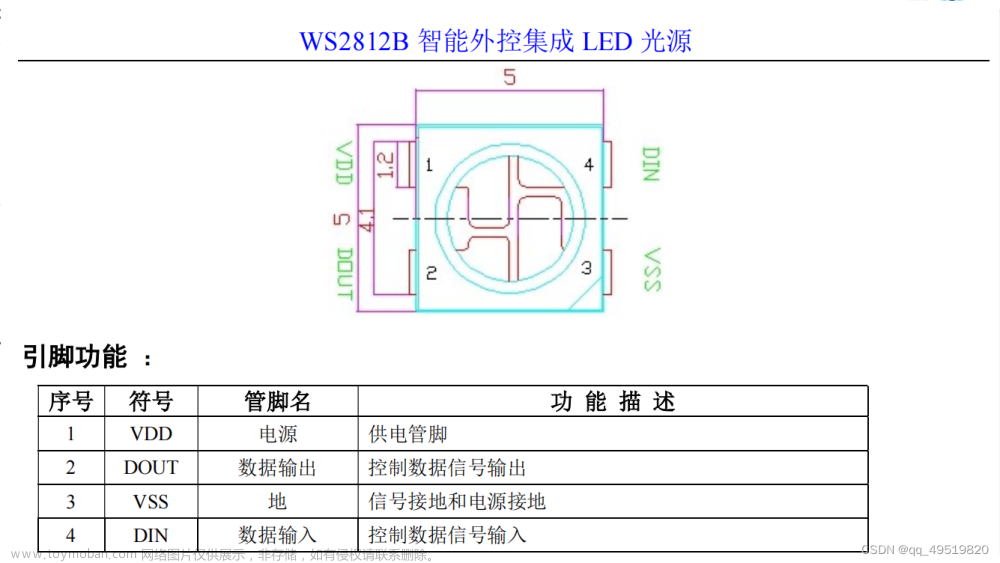
MCU:STM32F103c8t6
开发工具:STM32CubeMX
使用板子参考原理图:STM32F103C8T6最小系统板开源链接
PWM
脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等但宽度不一致的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率 。

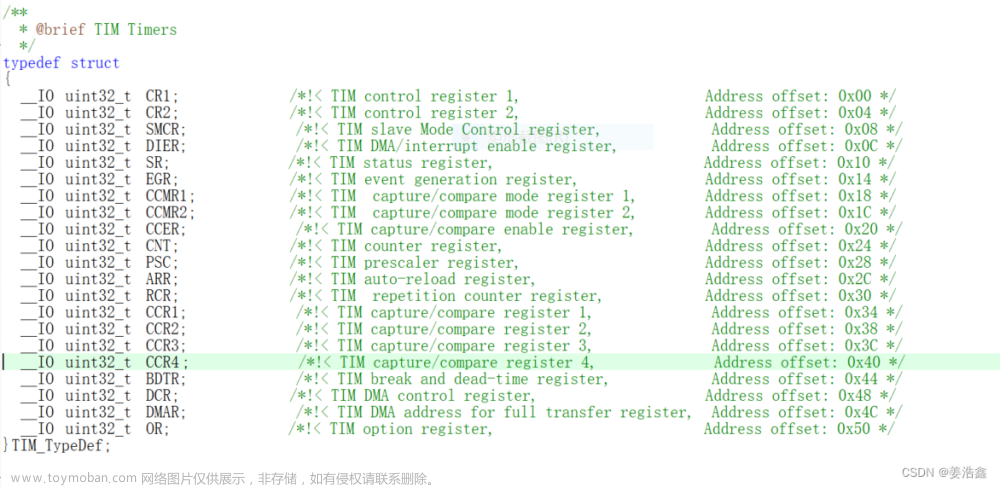
通过数据手册我们可以看到TIM2,TIM3,TIM4(通用定时器)挂载在APB2总线上,每个通用定时器都有独立的4个通道可以用来作为:输入捕获、输出比较、PWM输出、单脉冲模式输出等。
那么直接上STM32CUBEMX

这边选用了PB9作为TIM4_CH4通道用来做PWM输出(上述勾选去掉)

也就是外部时钟TCLK=72mhz
同时引进定时器的原理 向上计数模式UP

ARR就是自动重装载值
CCRX为捕获/比较寄存器值

CNT为计数器当前值
那么其中的逻辑是这样的
- 当CNT小于CCRx时,TIMx_CHx通道输出设置的电平;
- 当CNT等于或大于CCRx时,TIMx_CHx通道输出与设置相反的电平。
设置的电平

那么我们直接配置好
在 中加入使能代码
中加入使能代码
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4);看下示波器效果

看的出来是低电平20% 高电平80% 频率2KHZ
那么是怎么配置出来的呢
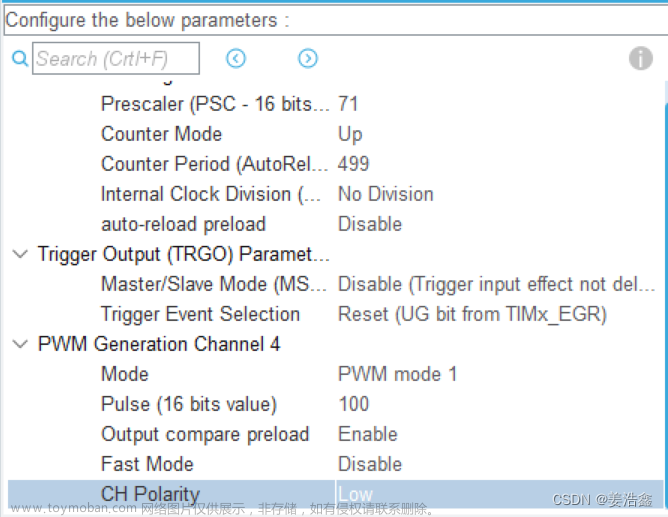
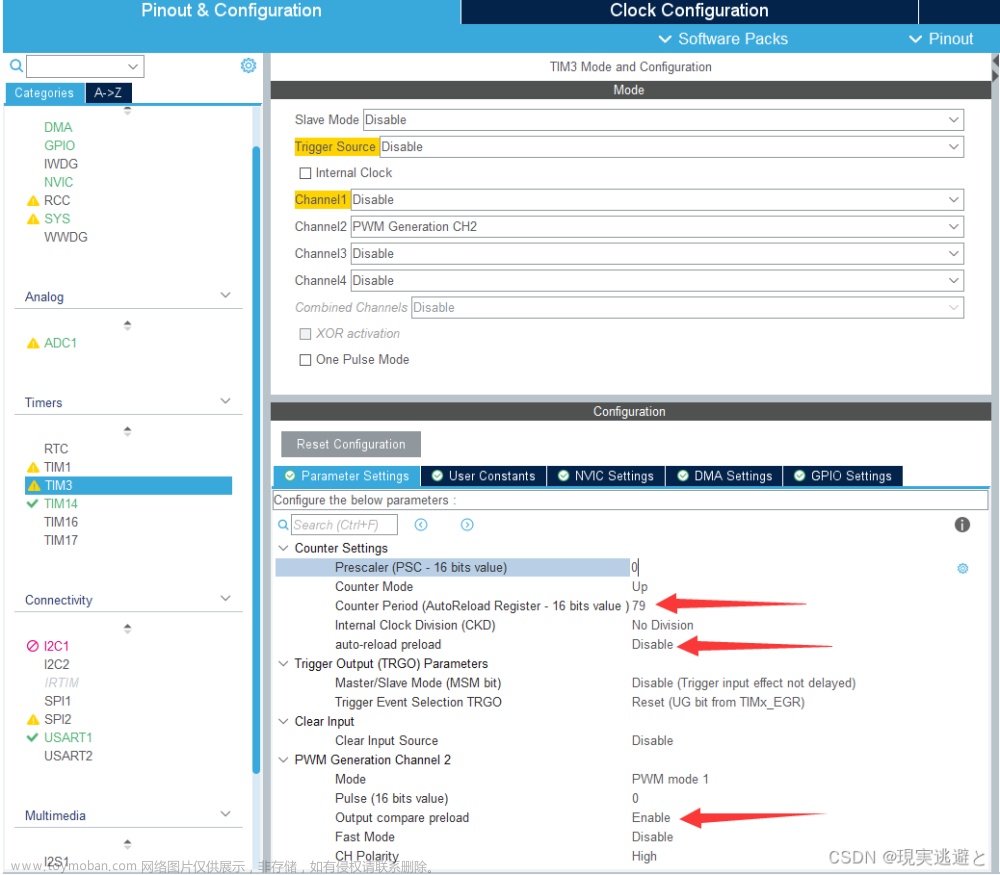
看图可得出以下数据:
PSC=71
向上计数模式
ARR=499
>>>>>>
PWM 模式1
CCRX=100
>>>>>>
通道输出极性低电平
好的,我们得到这么多数据,还需要记住一些公式
Fpwm=TCLK/(ARR+1)*(PSC+1) =2000HZ
占空比=CCRX/(ARR+1)=100/(499+1)=20%
改CCR1可以修改占空比,修改arr可以修改频率
好的,这样简单的PWM配置就完成了,接下来模拟时序
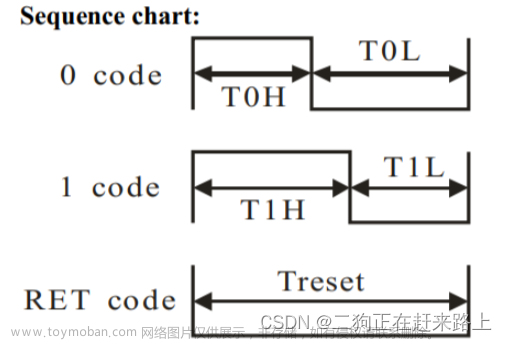
WS2812时序讲解具体在这个博客,看完再跳回本页面
1码 2/3高电平 1/3低电平
0码 1/3高电平 2/3低电平
一个码的周期是1.25us,也就是800khz
无聊写了个代码,算对应的PSC和ARR
计算 定时器arr和psc

随便选一组,怎么方便怎么来
选PSC=1,ARR=44,ch polarity high.
波形符合理论

引入新的方式:直接修改CCRx寄存器的值
htim4.Instance->CCR4 = 30DMA
进入正题 TIM+DMA配置

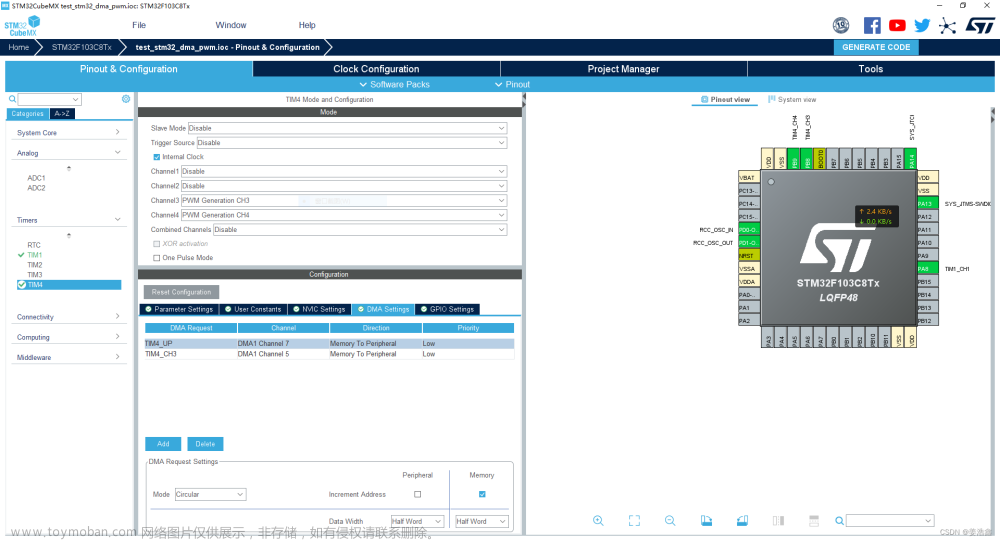
(HAL_TIM_PWM_PulseFinishedCallback() 是一个回调函数,当DMA传输完成以后,就会调用这个函数,由于本文DMA传输模式选择为Circular,所以DMA需要手动关闭,否则DMA会不断的搬运数据。)
DMA传输位宽和定义的缓冲区位宽要一致
u32 对word
u16 对half word
u8 对 byte

然后生成文件,打开工程
新建一个 NEW GROUP
创建WS2812.h WS2812.c文件
#ifndef _WS2812_H
#define _WS2812_H
#endif
//标识的命名规则一般是头文件名全大写,前后加下划线,并把文件名中的“.”也变成下划线
//头文件区
#include "main.h"
#include "dma.h"
#include "tim.h"
//用户修改参数区
#define ONE_PULSE (59) //1 码计数个数
#define ZERO_PULSE (29) //0 码计数个数
#define RESET_PULSE (48) //80 复位电平个数(不能低于40)
#define LED_NUMS (4) //led 个数
#define LED_DATA_LEN (24) //led 长度,单个需要24个字节
#define WS2812_DATA_LEN (LED_NUMS*LED_DATA_LEN) //ws2812灯条需要的数组长度
void ws2812_set_RGB(uint8_t R, uint8_t G, uint8_t B, uint16_t num);//设置彩灯颜色
void ws2812_example(void);
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim);
uint16_t RGB_buffur[RESET_PULSE + WS2812_DATA_LEN] = { 0 };
WS2812_DATA_LEN ==(LED_NUMS*LED_DATA_LEN)
测试用的LED_NUMS=4,那么数组长度为4*24+reset_pulse
reset_pulse>=40
(DMA 每一个定时器周期就搬运一个0到定时器CCR中,定时器将产生一个1.25us的全低电平,40个为50us,这个50us的低电平作为ws2812的复位信号。)
#include "WS2812.h"
uint16_t RGB_buffur[RESET_PULSE + WS2812_DATA_LEN] = { 0 };
void ws2812_set_RGB(uint8_t R, uint8_t G, uint8_t B, uint16_t num)
{
//指针偏移:需要跳过复位信号的N个0
uint16_t* p = (RGB_buffur + RESET_PULSE) + (num * LED_DATA_LEN);
for (uint16_t i = 0;i < 8;i++)
{
//填充数组
p[i] = (G << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
p[i + 8] = (R << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
p[i + 16] = (B << i) & (0x80)?ONE_PULSE:ZERO_PULSE;
}
}
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
// HAL_TIM_PWM_Stop_DMA(&htim4,TIM_CHANNEL_4);
// HAL_TIM_PWM_Stop_DMA(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Stop_DMA(&htim4,TIM_CHANNEL_3);//PA8
}
void ws2812_example(void)
{
//#1.填充数组
ws2812_set_RGB(0x22, 0x00, 0x00, 0);
ws2812_set_RGB(0x00, 0x22, 0x00, 1);
ws2812_set_RGB(0x00, 0x00, 0x22, 2);
ws2812_set_RGB(0x22, 0x22, 0x22, 3);
//#2.传输数据
// HAL_TIM_PWM_Start_DMA(&htim4,TIM_CHANNEL_4,(uint32_t *)RGB_buffur,(176));
// HAL_TIM_PWM_Start_DMA(&htim1,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,(176));
HAL_TIM_PWM_Start_DMA(&htim4,TIM_CHANNEL_3,(uint32_t *)RGB_buffur,(176));
//#3.延时:使效果可以被观察
HAL_Delay(500);
ws2812_set_RGB(0x22, 0x00, 0x00, 1);
ws2812_set_RGB(0x00, 0x22, 0x00, 2);
ws2812_set_RGB(0x00, 0x00, 0x22, 3);
ws2812_set_RGB(0x22, 0x22, 0x22, 0);
// HAL_TIM_PWM_Start_DMA(&htim4,TIM_CHANNEL_4,(uint32_t *)RGB_buffur,(176));
// HAL_TIM_PWM_Start_DMA(&htim1,TIM_CHANNEL_1,(uint32_t *)RGB_buffur,(176));
HAL_TIM_PWM_Start_DMA(&htim4,TIM_CHANNEL_3,(uint32_t *)RGB_buffur,(176));
HAL_Delay(500);
}
(RGB_buffur + RESET_PULSE) + (num * LED_DATA_LEN)对应得是
RGB_buffur[RESET_PULSE + num * LED_DATA_LEN]的地址(num取值这里是0-3)
实际上就是跳过最开始的数组里面的RESET_PULSE
RGB_buffur[]={ RESET_PULSE ,NUM0数据,NUM1数据,NUM2数据,NUM3数据}
在main.c文件while中加入
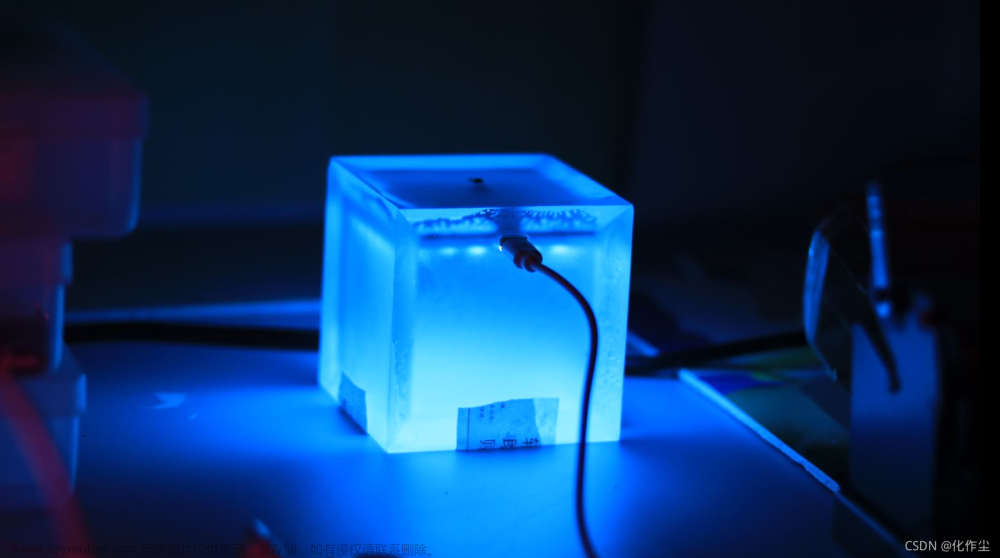
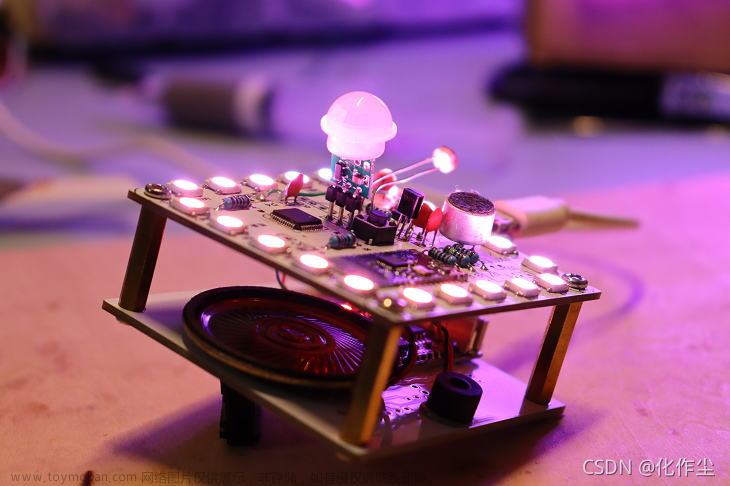
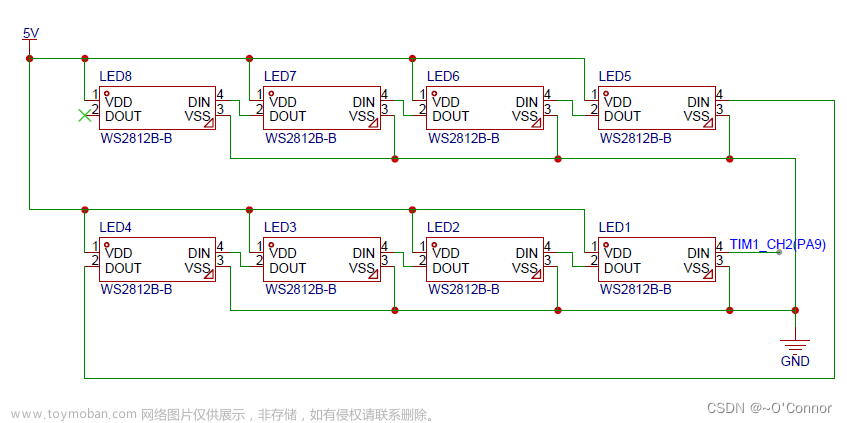
ws2812_example();实物效果图
WS2812
参考链接文章来源:https://www.toymoban.com/news/detail-789355.html
关于STM32F4xx使用DMA+TIM3_PWM调试灯带WS2812过程记录文章来源地址https://www.toymoban.com/news/detail-789355.html
到了这里,关于关于STM32利用TIM+PWM+DMA控制WS2812的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[HAL]STM32 SPI+DMA驱动WS2812](https://imgs.yssmx.com/Uploads/2024/02/702501-1.jpeg)