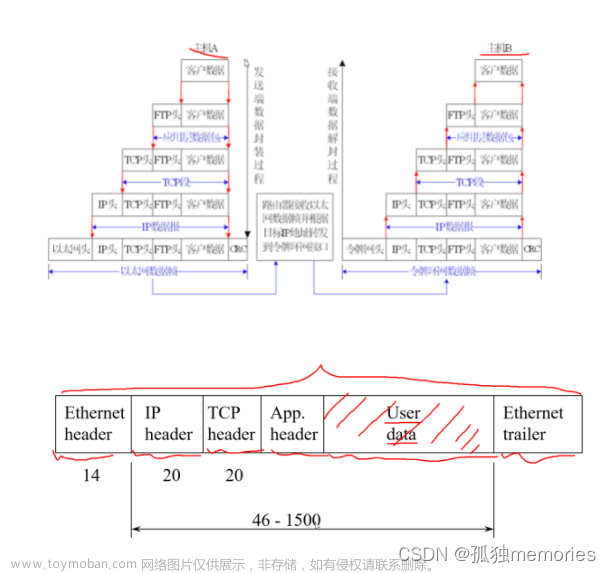
前言

1、前两篇文章通过对Snap7和S7-1200/S7-1500PLC的通信进行了详细的介绍。Snap7的优点开源性强、使用方便易于上手,跨平台和可移植性性强。但是Snap7也有个缺点就是只能访问PLC的DB、MB、I、Q区进行数据读写,不能对V区进行读写,有人说可以读写V区,但是目前我还没有得到可靠的验证。

2、ModbusTCP/ModbusRTU协议,通过开源的Libmodbus库和西门子S7-1200/S7-1500PLC通信进行数据交换。Libmodbus可以对PLC的DB、VB、MB、I、Q区进行读写操作,效率较高、开放性好,缺点就是如果用户要按位操作V区就存在安全隐患。操作流程为:先读取V区,因为Modbus协议得读写操作都是以字为单位,比较V区数据,把要改变得位数据置位或复位后再写入到PLC中,一个流程要对PLC进行2次操作,一次读操作,一次写操作。安全隐患主要存在读过程,如果读取后PLC内数据得某个位发生了变化,再去进行PLC数据得写操作过程就会存在安全隐患。
SOCKET
3、Socket通信,Socket通信得有点也是开放性较好,速度较快,缺点十Socket通信得数据是以CHAR类型ASCII码得形式进行,所以对数据需要转换为ASII。

有关Socket的详细介绍可以参考以下文章。
https://blog.csdn.net/lzc881012/article/details/127737864?spm=1001.2014.3001.5502https://blog.csdn.net/lzc881012/article/details/127737864?spm=1001.2014.3001.5502
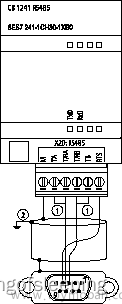
合信MT226ES程序





PLC的实数转ASCII码指令说明及使用
http://www.a766.com/plc/112387.htmlhttp://www.a766.com/plc/112387.html
具体的使用和介绍可参考如上连接或到西门子官网进行学习,合信PLC指令和西门子PLC指令完全一致,不分机型也可以直接用Step7microWin进行编程。




SOCKET上位C++软件
上位C++软件采用之前的例程中的Socket客户端进行测试和介绍,原文章连接如下:
https://blog.csdn.net/lzc881012/article/details/127775714?spm=1001.2014.3001.5502https://blog.csdn.net/lzc881012/article/details/127775714?spm=1001.2014.3001.5502
设置好IP参数和端口后进行连接PLC服务器,连接后PLC侧如下图所示。会显示当前连接的客户端的IP地址。

数据读写操作,此例程只写了PLC侧发送数据ASCII码格式转换,读取ASCII码格式转换没有写,以后有时间再慢慢测试。


 文章来源:https://www.toymoban.com/news/detail-789637.html
文章来源:https://www.toymoban.com/news/detail-789637.html
经过简单的测试可得出结论就是上位软件通过SOCKET对PLC进行数据读写比较麻烦,需要编写大量的数据转换指令。并且PLC侧的ASCII转换指令比较浪费内存。因此实用性较差。以下为socket接收数据程序。
BOOL CMFCApplicationSocketClientDemoDlg::ConnectServerSocket(CMFCApplicationSocketClientDemoDlg* pClient)
{
CSoceketInitConfig ClientSockInit(2,2);
m_pClientSock = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);
if (m_pClientSock==NULL)
{
MessageBox(_T("ClientSocket创建失败!"),_T("信息提示:"),MB_OKCANCEL|MB_ICONERROR);
return FALSE;
}
sockaddr_in ServerAddr_in;
ServerAddr_in.sin_family = AF_INET;
int m_SerPort = GetDlgItemInt(IDC_EDITSERVERPORT);
CString StrSerIp;
GetDlgItemText(IDC_IPADDRESS_SERVER,StrSerIp);
if (StrSerIp==_T("0.0.0.0")||m_SerPort > 65535 || m_SerPort < 1024|| m_SerPort==0)
{
MessageBox(_T("请输入正确端口(1024-65535)或IP地址,重新连接!"), _T("信息提示:"), MB_OK | MB_ICONINFORMATION);
SetRevTextMsg(_T("请输入正确端口IP地址,重新连接"));
return FALSE;
}
char* pStrIP = CstringToWideCharArry(StrSerIp);
ServerAddr_in.sin_port = htons(m_SerPort);
ServerAddr_in.sin_addr.S_un.S_addr = inet_addr(pStrIP);
if (SOCKET_ERROR==connect(m_pClientSock, (sockaddr*)&ServerAddr_in, sizeof(ServerAddr_in)))
{
MessageBox(_T("服务器连接失败,请检查你填写的IP和端口是否错误!"), _T("信息提示:"), MB_OK | MB_ICONWARNING);
SetRevTextMsg(_T("服务器连接失败,请检查你填写的IP和端口是否错误!"));
return FALSE;
}
pClient->SetRevTextMsg(_T("连接服务器成功"));
pClient->m_CutDownConnect.EnableWindow( TRUE);
pClient->m_ConnectServer.EnableWindow(FALSE);
m_ServerConnectSucced = TRUE;
CString RevMsg;
while (true)
{
if (socket_Select(m_pClientSock,100,TRUE))
{
char recvBuff[MaxBufSize] = { 0 };
int iRead = recv(m_pClientSock, recvBuff, sizeof(recvBuff), 0);
if (iRead > 0)
{
RevMsg = CharArryToCstring(recvBuff);
pClient->SetRevTextMsg(StrSerIp + _T(">>") + RevMsg);
for (int i = 0; i < iRead; i++)
{
printf("recvBuff[%d]=%d\n",i, int(recvBuff[i]));
}
}
else
{
pClient->SetRevTextMsg(_T("已断线,请重新连接"));
pClient->m_CutDownConnect.EnableWindow(FALSE);
pClient->m_ConnectServer.EnableWindow(TRUE);
m_ServerConnectSucced = FALSE;
return TRUE;
}
}
}
return TRUE;
}通信线程文章来源地址https://www.toymoban.com/news/detail-789637.html
DWORD WINAPI ConnectServerThread(LPCVOID lParam)
{
CMFCApplicationSocketClientDemoDlg* pClient = (CMFCApplicationSocketClientDemoDlg*)lParam;
if (pClient->ConnectServerSocket(pClient))
{
}
return 0;
}
到了这里,关于MFC Socket和合信CTMC M266ES 运动控制型PLC通信进行数据交换的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!