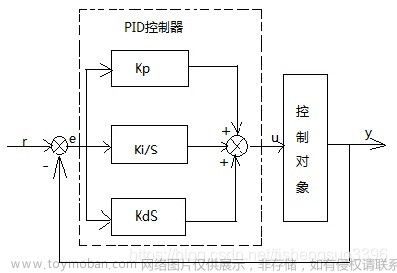
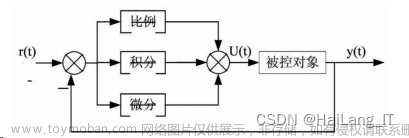
1. PID介绍
PID是一种常见的控制算法,全称为Proportional-Integral-Derivative,即比例-积分-微分控制器。PID控制器是一种线性控制器,它将设定值与实际值进行比较,根据误差的大小,控制器会相应地调整系统的比例、积分和微分系数,以减小误差。
PID控制器的基本公式为:
u ( t ) = K p ∗ e ( t ) + K i ∗ ∫ 0 t e ( τ ) d τ + K d ∗ d d t e ( t ) (1) u(t) = K_p * e(t) + K_i * \int^{t}_{0}{e(\tau)} d\tau + K_d *\frac{d}{dt} e(t) \tag{1} u(t)=Kp∗e(t)+Ki∗∫0te(τ)dτ+Kd∗dtde(t)(1)
其中,$u(t) 是控制器的输出, 是控制器的输出, 是控制器的输出,e(t)$ 是误差信号(设定值与实际值之差), K p K_p Kp、 K i K_i Ki和 K d K_d Kd是控制器的比例、积分和微分系数。
PID控制器在工程、科学和工业等领域中有着广泛的应用。例如,在汽车定速巡航系统、空调系统、工业自动化生产线等系统中都可以看到PID控制器的身影。此外,PID控制器还广泛应用于机器人控制、化工生产、航天器控制等领域。
将公式(1)转换为离散形式,则有
u ( n ) = K p ∗ e ( n ) + K i ∗ T ∗ ∑ i = 0 n e ( i ) + K d ∗ e ( n ) − e ( n − 1 ) T (2) u(n) = K_p * e(n) + K_i * T*\sum^{n}_{i=0}{e(i)} + K_d *\frac{e(n)-e(n-1)}{T} \tag{2} u(n)=Kp∗e(n)+Ki∗T∗i=0∑ne(i)+Kd∗Te(n)−e(n−1)(2)
其中 T T T为采样周期,由此公式可以得到PID代码的实现如下
#PID.py
class PIDController:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.previous_error = 0
self.integral = 0
def cal_output(self, error, dt):
derivative = error - self.previous_error
u = self.Kp * error + self.Ki * self.integral * dt + self.Kd * derivative / dt
self.integral += error
self.previous_error = error
return u
2. PID横向控制原理
在自动驾驶横向控制中,主要通过控制方向盘的角度来控制车辆的横向距离误差,因此我们可以通过横向距离误差 e y e_y ey来作为PID的输入,输出可以作为方向盘转角 δ f \delta_f δf,结合之前我们的车辆运动学模型(这里我们假设方向盘转角与前轮转角比是1),横向误差计算的几何结构如下图所示:

图中
- P P P:当前车辆的目标点车
- l d l_d ld:车辆后轴中心点 A A A到 F F F的距离
- θ \theta θ: l d l_d ld与车轴的夹角
- φ \varphi φ:车辆的航向角
- e y e_y ey:横向偏差
由 A A A和 P P P的坐标可以计算得
β = a r c t a n y 1 − y 0 x 1 − x 0 (3) \beta = arctan\frac{y_1-y_0}{x_1-x_0} \tag{3} β=arctanx1−x0y1−y0(3)
由图中的几何关系,我们可以得到
e y = l d s i n θ = l d s i n ( β − φ ) (4) e_y = l_d sin\theta =l_d sin(\beta - \varphi)\tag{4} ey=ldsinθ=ldsin(β−φ)(4)
其中
φ
\varphi
φ为车辆的航向角yaw,其实现方法详见bicycle_model.py
3. 算法和仿真实现
bicycle_model.py
#!/usr/bin/python
# -*- coding: UTF-8 -*-
import math
import matplotlib.pyplot as plt
import numpy as np
from celluloid import Camera
class Vehicle:
def __init__(self,
x=0.0,
y=0.0,
yaw=0.0,
v=0.0,
dt=0.1,
l=3.0):
self.steer = 0
self.x = x
self.y = y
self.yaw = yaw
self.v = v
self.dt = dt
self.L = l # 轴距
self.x_front = x + l * math.cos(yaw)
self.y_front = y + l * math.sin(yaw)
def update(self, a, delta, max_steer=np.pi):
delta = np.clip(delta, -max_steer, max_steer)
self.steer = delta
self.x = self.x + self.v * math.cos(self.yaw) * self.dt
self.y = self.y + self.v * math.sin(self.yaw) * self.dt
self.yaw = self.yaw + self.v / self.L * math.tan(delta) * self.dt
self.v = self.v + a * self.dt
self.x_front = self.x + self.L * math.cos(self.yaw)
self.y_front = self.y + self.L * math.sin(self.yaw)
class VehicleInfo:
# Vehicle parameter
L = 3.0 #轴距
W = 2.0 #宽度
LF = 3.8 #后轴中心到车头距离
LB = 0.8 #后轴中心到车尾距离
MAX_STEER = 0.6 # 最大前轮转角
TR = 0.5 # 轮子半径
TW = 0.5 # 轮子宽度
WD = W #轮距
LENGTH = LB + LF # 车辆长度
def draw_trailer(x, y, yaw, steer, ax, vehicle_info=VehicleInfo, color='black'):
vehicle_outline = np.array(
[[-vehicle_info.LB, vehicle_info.LF, vehicle_info.LF, -vehicle_info.LB, -vehicle_info.LB],
[vehicle_info.W / 2, vehicle_info.W / 2, -vehicle_info.W / 2, -vehicle_info.W / 2, vehicle_info.W / 2]])
wheel = np.array([[-vehicle_info.TR, vehicle_info.TR, vehicle_info.TR, -vehicle_info.TR, -vehicle_info.TR],
[vehicle_info.TW / 2, vehicle_info.TW / 2, -vehicle_info.TW / 2, -vehicle_info.TW / 2, vehicle_info.TW / 2]])
rr_wheel = wheel.copy() #右后轮
rl_wheel = wheel.copy() #左后轮
fr_wheel = wheel.copy() #右前轮
fl_wheel = wheel.copy() #左前轮
rr_wheel[1,:] += vehicle_info.WD/2
rl_wheel[1,:] -= vehicle_info.WD/2
#方向盘旋转
rot1 = np.array([[np.cos(steer), -np.sin(steer)],
[np.sin(steer), np.cos(steer)]])
#yaw旋转矩阵
rot2 = np.array([[np.cos(yaw), -np.sin(yaw)],
[np.sin(yaw), np.cos(yaw)]])
fr_wheel = np.dot(rot1, fr_wheel)
fl_wheel = np.dot(rot1, fl_wheel)
fr_wheel += np.array([[vehicle_info.L], [-vehicle_info.WD / 2]])
fl_wheel += np.array([[vehicle_info.L], [vehicle_info.WD / 2]])
fr_wheel = np.dot(rot2, fr_wheel)
fr_wheel[0, :] += x
fr_wheel[1, :] += y
fl_wheel = np.dot(rot2, fl_wheel)
fl_wheel[0, :] += x
fl_wheel[1, :] += y
rr_wheel = np.dot(rot2, rr_wheel)
rr_wheel[0, :] += x
rr_wheel[1, :] += y
rl_wheel = np.dot(rot2, rl_wheel)
rl_wheel[0, :] += x
rl_wheel[1, :] += y
vehicle_outline = np.dot(rot2, vehicle_outline)
vehicle_outline[0, :] += x
vehicle_outline[1, :] += y
ax.plot(fr_wheel[0, :], fr_wheel[1, :], color)
ax.plot(rr_wheel[0, :], rr_wheel[1, :], color)
ax.plot(fl_wheel[0, :], fl_wheel[1, :], color)
ax.plot(rl_wheel[0, :], rl_wheel[1, :], color)
ax.plot(vehicle_outline[0, :], vehicle_outline[1, :], color)
# ax.axis('equal')
if __name__ == "__main__":
vehicle = Vehicle(x=0.0,
y=0.0,
yaw=0,
v=0.0,
dt=0.1,
l=VehicleInfo.L)
vehicle.v = 1
trajectory_x = []
trajectory_y = []
fig = plt.figure()
# 保存动图用
# camera = Camera(fig)
for i in range(600):
plt.cla()
plt.gca().set_aspect('equal', adjustable='box')
vehicle.update(0, np.pi / 10)
draw_trailer(vehicle.x, vehicle.y, vehicle.yaw, vehicle.steer, plt)
trajectory_x.append(vehicle.x)
trajectory_y.append(vehicle.y)
plt.plot(trajectory_x, trajectory_y, 'blue')
plt.xlim(-12, 12)
plt.ylim(-2.5, 21)
plt.pause(0.001)
# camera.snap()
# animation = camera.animate(interval=5)
# animation.save('trajectory.gif')
main.py
from scipy.spatial import KDTree
from bicycle_model import Vehicle, VehicleInfo, draw_trailer
from PID import PIDController
import numpy as np
import matplotlib.pyplot as plt
import math
import imageio
MAX_SIMULATION_TIME = 200.0 # 程序最大运行时间200*dt
PID = PIDController(2, 0.001, 3)
def NormalizeAngle(angle):
a = math.fmod(angle + np.pi, 2 * np.pi)
if a < 0.0:
a += (2.0 * np.pi)
return a - np.pi
def main():
# 设置跟踪轨迹
ref_path = np.zeros((1000, 2))
ref_path[:, 0] = np.linspace(0, 50, 1000) # x坐标
ref_path[:, 1] = 10 * np.sin(ref_path[:, 0] / 20.0) # y坐标
ref_tree = KDTree(ref_path)
# 假设车辆初始位置为(0,0),航向角yaw=0.0,速度为2m/s,时间周期dt为0.1秒
vehicle = Vehicle(x=0.0,
y=0.0,
yaw=np.pi/2,
v=2.0,
dt=0.1,
l=VehicleInfo.L)
time = 0.0 # 初始时间
# 记录车辆轨迹
trajectory_x = []
trajectory_y = []
lat_err = [] # 记录横向误差
i = 0
image_list = [] # 存储图片
plt.figure(1)
last_idx = ref_path.shape[0] - 1 # 跟踪轨迹的最后一个点的索引
old_idx = 0 # 记录上一次的索引点
target_ind = 0 # 第一个目标点的索引
while MAX_SIMULATION_TIME >= time and last_idx > target_ind:
time += vehicle.dt # 累加一次时间周期
vehicle_positon = np.zeros(2)
vehicle_positon[0] = vehicle.x
vehicle_positon[1] = vehicle.y
distance, target_ind = ref_tree.query(vehicle_positon) # 在跟踪轨迹上查找离车辆最近的点
if old_idx > target_ind:
print("ERROR: Find the point behind the vehicle.")
target_ind = old_idx + 1 # 查找到车辆后面的点,将目标点索引置为上一次的索引点idx+1
old_idx = target_ind # 记录本次索引点idx
alpha = math.atan2(
ref_path[target_ind, 1] - vehicle_positon[1], ref_path[target_ind, 0] - vehicle_positon[0])
l_d = np.linalg.norm(ref_path[target_ind] - vehicle_positon) # 目标点与车定位点距离l_d
theta_e = NormalizeAngle(alpha - vehicle.yaw)
e_y = l_d * math.sin(theta_e) # 计算实际误差,0为目标距离
lat_err.append(e_y)
delta_f = PID.cal_output(e_y, vehicle.dt)
vehicle.update(0.0, delta_f, np.pi / 10) # 由于假设纵向匀速运动,所以加速度a=0.0
trajectory_x.append(vehicle.x)
trajectory_y.append(vehicle.y)
# 显示动图
plt.cla()
plt.plot(ref_path[:, 0], ref_path[:, 1], '-.b', linewidth=1.0)
draw_trailer(vehicle.x, vehicle.y, vehicle.yaw, vehicle.steer, plt)
plt.plot(trajectory_x, trajectory_y, "-r", label="trajectory")
plt.plot(ref_path[target_ind, 0], ref_path[target_ind, 1], "go", label="target")
plt.axis("equal")
plt.grid(True)
plt.pause(0.001)
plt.savefig("temp.png")
i += 1
if (i % 50) > 0:
image_list.append(imageio.imread("temp.png"))
imageio.mimsave("display.gif", image_list, duration=0.1)
plt.figure(2)
plt.subplot(2, 1, 1)
plt.plot(ref_path[:, 0], ref_path[:, 1], '-.b', linewidth=1.0)
plt.plot(trajectory_x, trajectory_y, 'r')
plt.title("actual tracking effect")
plt.subplot(2, 1, 2)
plt.plot(lat_err)
plt.title("lateral error")
plt.show()
if __name__ == '__main__':
main()
运行效果如下

跟踪效果和控制误差
 文章来源:https://www.toymoban.com/news/detail-789774.html
文章来源:https://www.toymoban.com/news/detail-789774.html
文章首发公众号:iDoitnow如果喜欢话,可以关注一下文章来源地址https://www.toymoban.com/news/detail-789774.html
到了这里,关于PID横向控制和仿真实现的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!