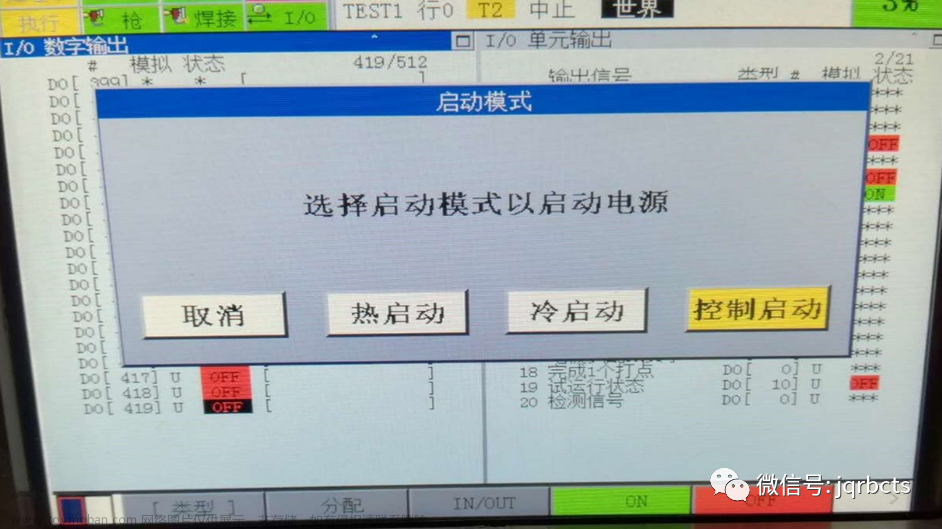
现象如图: 原因:机器人在进行零位标定相关操作后出现文章来源:https://www.toymoban.com/news/detail-790621.html
原因:机器人在进行零位标定相关操作后出现文章来源:https://www.toymoban.com/news/detail-790621.html
解决方法:MENU---系统---变量---$DMR_GRP--回车---回车
 选择有效后查看一下机器人点位
选择有效后查看一下机器人点位 然后重启机器人,开机后查看机器人点位和关机前对比,点位一致则表示成功,上使能机器人就可以手动运动。
然后重启机器人,开机后查看机器人点位和关机前对比,点位一致则表示成功,上使能机器人就可以手动运动。 文章来源地址https://www.toymoban.com/news/detail-790621.html
文章来源地址https://www.toymoban.com/news/detail-790621.html
到了这里,关于发那科机器人:MOTN-049 零点标定结果未更新的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!