一、概述
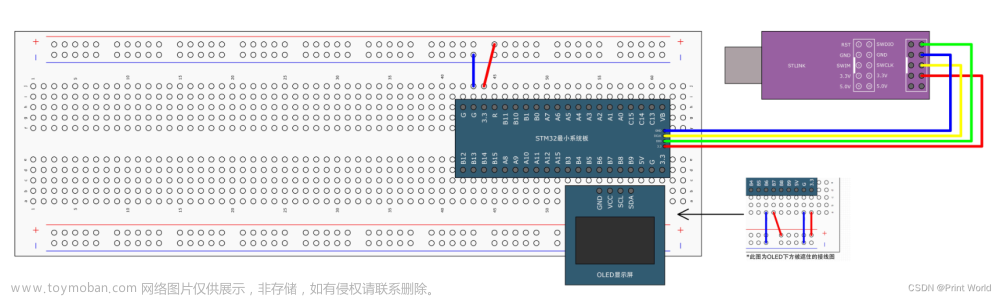
硬件:基于STM32F407VET6编写
软件:使用两个GPIO口,一个用作串口发送TX,一个用作串口接收RX,采用的是定时器模拟 时序。
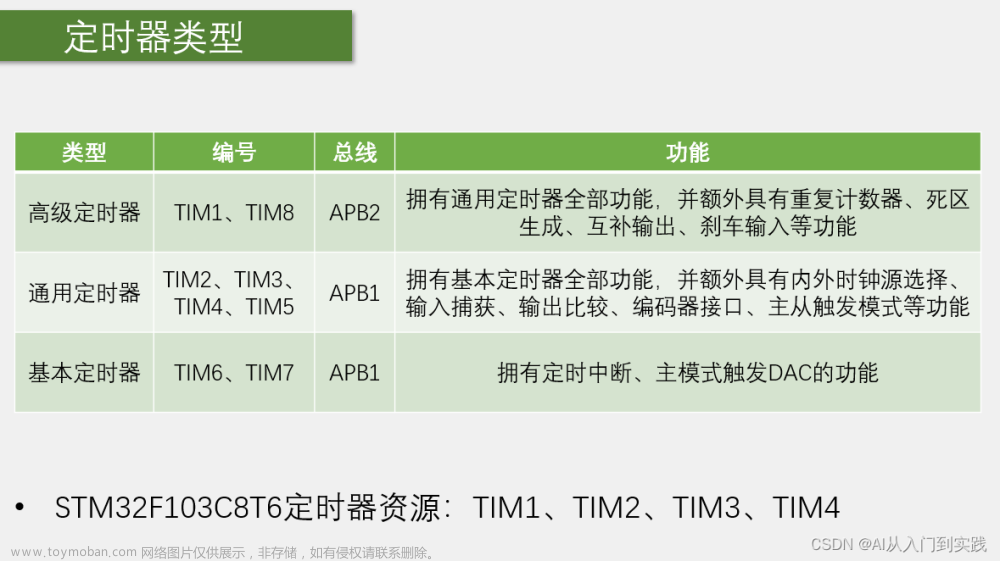
二、串口简介
要模拟串口,首先肯定是需要了解串口的协议,根据协议来编写程序。

UART的通信方式是由1个起始位,8个数据位,包含一个奇偶校验位,和结束位构成 。在本次的设计中默认为波特率为9600,停止位为1位,8位数据位,无奇偶校验位。
先介绍起始位,从高电平跳变为低电平,表示通信开始。再来简单介绍下波特率,单位时间内传送码元符号的个数,波特率9600,也就是1s内传送9600个bit,一个bit所需要的时间为 1000000us / 9600 = 104.166 us,也就是104us。
三、程序实现
3.1 头文件参数定义
#ifndef _S_UART_H_
#define _S_UART_H_
#include "sys.h"
#include "delay.h"
//定义通信波特率
#define BaudRate_9600 104 //1000000us/9600=104.1666 发送1个位所需要的时间
//GPIO定义
#define S_Uart_Tx PCout(3) //模拟串口TX端
#define S_Uart_Rx PCin(4) //模拟串口RX端
typedef enum{
State_State = 0, //起始状态
State_transfer, //传输状态
State_Stop, //停止状态
}UartState;
#define SUartLength 200 //模拟串口缓冲区长度
extern u8 SUartCnt; //模拟串口缓冲区位置
extern u8 SUartBuff[SUartLength]; //模拟串口缓冲区
void S_Uart_GPIO_Init(void);
void S_Uart_Send_Buff(u8 *buff,u8 length);
u8 S_Uart_Rx_Handler(u8 *buf,u8 *length);
#endif3.2 GPIO的初始化
//模拟串口GPIO初始化
void S_Uart_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//开时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG,ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3; //TX GPIOC3
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //推挽输出
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOC, &GPIO_InitStruct);
S_Uart_Tx = 1;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4; //RX GPIOC4
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //上拉输入
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
}3.3 模拟串口发送
//模拟串口发送一个字节
void S_Uart_One_Tx(u8 Data)
{
u8 i;
S_Uart_Tx=0; //起始位
delay_us(BaudRate_9600);
for(i=0; i<8; i++)
{
if(Data & 0x01) //串口协议 先发LSB
S_Uart_Tx = 1;
else
S_Uart_Tx = 0;
delay_us(BaudRate_9600);
Data >>= 1;
}
S_Uart_Tx = 1;
delay_us(BaudRate_9600);
}
//模拟串口发送数据
void S_Uart_Send_Buff(u8 *buff,u8 length)
{
for(u8 i=0; i<length; i++)
{
S_Uart_One_Tx(buff[i]);
}
}3.4 模拟串口接收
需要开启一个定时器中断,对模拟串口的电平进行监视,废话不多说,直接上代码。
void Time4_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef Tim4_TimeBaseStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
Tim4_TimeBaseStruct.TIM_Period = arr; //重载值
Tim4_TimeBaseStruct.TIM_Prescaler = psc; //预分频值
Tim4_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
Tim4_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM4,&Tim4_TimeBaseStruct);
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM4,ENABLE);
NVIC_InitStruct.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStruct);
}
void TIM4_IRQHandler(void)
{
static u8 value=0;
static UartState M_State = State_State;
static u8 bit_cnt;
if(TIM_GetFlagStatus(TIM4,TIM_FLAG_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4,TIM_FLAG_Update);
if(S_Uart_Rx==0 && M_State == State_State) //起始位 下降沿
{
M_State = State_transfer; //接收到起始位,状态为传输中
bit_cnt=0;
}
else if(M_State == State_transfer)
{
bit_cnt++;
if(S_Uart_Rx)
{
value |= (1<<(bit_cnt-1));
}
else
{
value &= ~(1<<(bit_cnt-1));
}
if(bit_cnt >= 8)
M_State = State_Stop;
}
else if(S_Uart_Rx && M_State==State_Stop)
{
bit_cnt=0;
if(SUartCnt < SUartLength)
SUartBuff[SUartCnt++] = value; //存入缓冲区
else
SUartCnt = 0;
M_State = State_State; //状态回到起始状态,坐等下一帧数据
}
}
}
//接收串口数据处理
u8 S_Uart_Rx_Handler(u8 *buf,u8 *length)
{
*length = 0;
if(SUartCnt > 0) //模拟串口缓冲区不为空
{
*length = SUartCnt;
memcpy(buf,SUartBuff,*length); //
SUartCnt = 0;
}
return *length;
}
3.5 主函数调用
int main(void)
{
u16 i;
u8 len;
//u8 buff[5]={0,1,2,3,4};
u8 buff[200];
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //延时初始化
LED_Init(); //初始化与LED连接的硬件接口
S_Uart_GPIO_Init(); //模拟串口
Time4_Init(BaudRate_9600,84-1); //104us
while(1)
{
if(S_Uart_Rx_Handler(buff,&len))
{
S_Uart_Send_Buff(buff,len); //将接收到的数据发送出去
}
if(++i %100 == 0)
{
i=0;
LED0 = !LED0;
//S_Uart_Send_Buff(buff,5);
}
delay_ms(10);
}
}四、程序执行效果

单片机将模拟串口接收到的数据用模拟串口发送出去。 文章来源:https://www.toymoban.com/news/detail-791478.html
好了,内容到此结束了,制作不易,如果对大家有帮助麻烦点个赞,谢谢!文章来源地址https://www.toymoban.com/news/detail-791478.html
到了这里,关于STM32学习笔记 IO口模拟串口 (接收采用定时器方式)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!