一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【路径规划】基于matlab RRT算法求解机器人避障路径规划问题【含Matlab源码 319期】
点击上面蓝色字体,直接付费下载,即可。
获取代码方式2:
付费专栏Matlab路径规划(初级版)
备注:
点击上面蓝色字体付费专栏Matlab路径规划(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab路径规划(初级版),凭支付凭证,私信博主,可免费获得1份本博客上传CSDN资源代码(有效期为订阅日起,三天内有效);
点击CSDN资源下载链接:1份本博客上传CSDN资源代码
二、RRT算法简介
1 RRT定义
RRT(Rapidly-Exploring Random Tree)算法是一种基于采样的路径规划算法,常用于移动机器人路径规划,适合解决高维空间和复杂约束下的路径规划问题。基本思想是以产生随机点的方式通过一个步长向目标点搜索前进,有效躲避障碍物,避免路径陷入局部极小值,收敛速度快。本文通过matlab实现RRT算法,解决二维平面的路径规划问题。
2 地图
为了方便算法的实现,使用离散量来表达环境地图。其中,数值0表示无障碍物的空区域,数值1表示该区域有障碍物。
RRT算法中搜索到的顶点坐标为连续点,在地图中产生随机点,算法将通过连续的点构建树。此过程中,对树枝和顶点进行检测,检测顶点所处位置是否是空区域。下载附录中.dat文件,绘制地图。
colormap=[1 1 1; 0 0 0; 1 0 0; 0 1 0; 0 0 1];
imshow(uint8(map),colormap)
note:数据中的列为x轴,行为y轴
3 RRT算法原理
通过matlab程序构建从起始位置到目标位置的树,并生成连接两个点的路径。使用一颗中心点在起始点的树,而不是两颗树(一个中心点在起始位置,一个中心点在目标位置)。
编写一个matlab函数,输入和输出有相同的形式。
function [vertices, edges, path] = rrt(map, q_start, q_goal, k, delta_q, p)
其中:
map:.mat文件中的地图矩阵
q_start:起点的x和y坐标
q_goal:目标点的x和y坐标
k: 在目标点无法找到是,控制产生搜索树的最大迭代次数为k次
delta_q : q_new 和 q_near之间的距离
p: 将q_goal 作为q_rand 的概率,当随机产生的随机数小于p,将目标点作为随机点q_rand,当随机产生的数大于p时,产生一个随机点作为q_rand
vertices:顶点的x和y坐标,生成随机树的过程中产生的所有的点的坐标都存储在这个矩阵中,第一个点为起点,最后一个点为目标点。是一个2行n列的矩阵
deges:生成随机树的所有树枝,一共有n-1个树枝,因此该矩阵有n-1行,每一行的两列分别表示两个点的索引号。一旦搜索到目标点,最后一行将表示目标点,沿着目标点回溯,即可找到路径
path: 从起始点到目标点的索引,是一个行向量
下面用一个图来表示上面提到的算法里的一些变量:

4 障碍物检测
检测树枝(即q_near和q_new之间的edge)是否处于自由空间,可以使用增量法或者等分法,示意图如下(假设两点之间有10个点,左图为为增量检测法,右图为等分法,从示意图中可以看出使用等分法检测次数更少):
在本文中,使用k=10000,delta_q=50,p=0.3, 我们将获得如下结果:
5 路径平滑处理
完成基本的RRT算法之后,我们获得了一条从起点到终点的路径,现在对这条路径进行平滑和降噪处理,处理完成之后,我们将得到一条更短的路径。
采用贪心算法:
连接q_start和q_goal,如果检测到两个点之间有障碍物,则将q_goal替换为前一个点,直到两个点能连接上(中间无障碍物)为止。一旦q_goal被连接上,
在matlab中定义平滑函数:
function [path_smooth] = smooth(map, path, vertices, delta)
其中:
path: 从起始点到目标位置的路径索引号
vertices:树中所有的顶点坐标
delta:增量距离,用来检测路径顶点之间的直接连接是否在自由空间之内,每个edge都被delta分割成几段
path_smooth:经过平滑处理之后,路径点将会减少,用path_smooth记录平滑之后的路径,仍然是一个行向量,记录路径的索引号
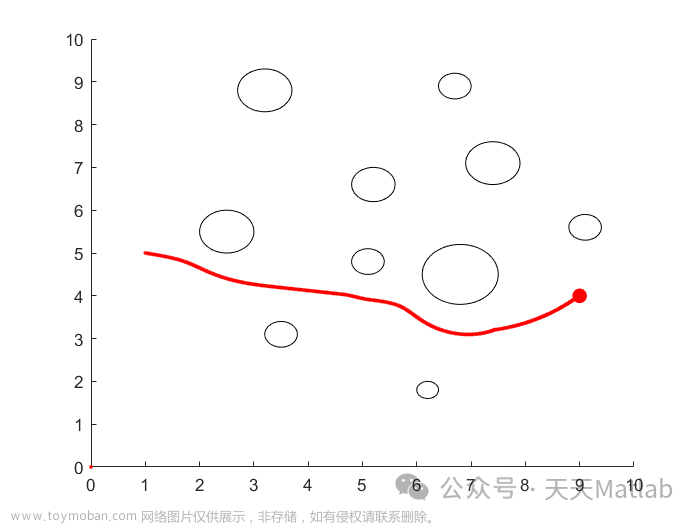
平滑处理之后的路径为:
6 总结
RRT算法是一种增量式的搜索算法,基于概率的思想,它是一种概率完备的路径优化算法,具有求解速度上的优势。RRT基本算法有其自身缺陷,求解得到的路径通常质量不好,带有棱角,不够光滑。因此需要对路径进行平滑处理,才能得到适合机器人路径跟踪的路径曲线。
三、部分源代码
%main.m
CreateMap;
fatehr=[];
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2019b
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]RRT路径规划算法文章来源:https://www.toymoban.com/news/detail-791560.html
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除文章来源地址https://www.toymoban.com/news/detail-791560.html
到了这里,关于【路径规划】RRT算法机器人避障路径规划【含Matlab源码 319期】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!