本篇文章主要讲解主控板为STM32,利用TB6612驱动来驱动电机的整个流程,看完点个赞吧!
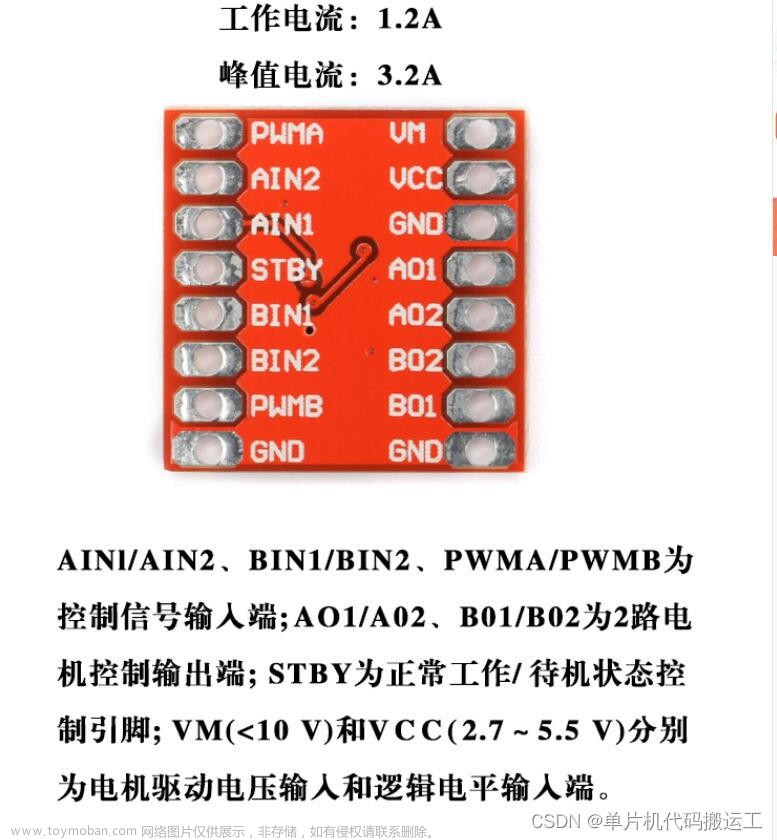
一、TB6612接线
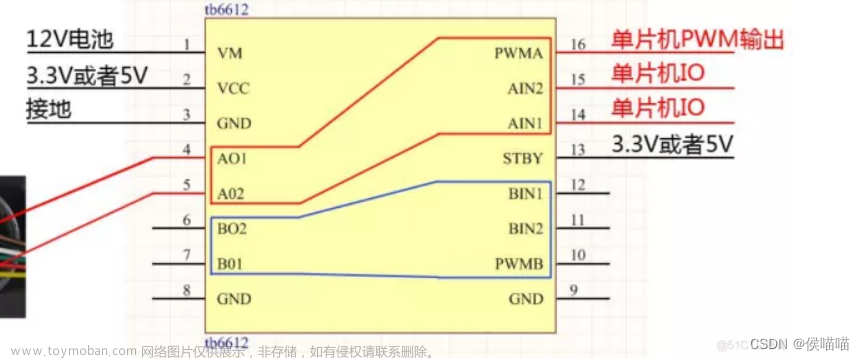
PWMA---连接代码中的PB0口 VM------接10V以内电压
AIN2-----接代码中的PB3口 VCC-----接5V
AIN1-----接代码中的P7口 GND-----接地
STBY----连接5V A01-----连接电机1
BIN1--- 接单片机I/O A02-----连接电机1
BIN2---- 接单片机I/O B2------连接电机2
PWMB---接单片机PWM口 B1------连接电机2
GND-----接地 GND----接地
代码我们先放后面来讲吧,我们这里先讲如何接线的,我使用的是STM32C8T6,原理图具体看这个专栏的上一篇博客 《智能家居系列一》,这里不再附图啦。
首先呢整个驱动需要接的口(对我使用的而言)是:PWMA ,AIN1,AIN2,STBY,VM ,VCC,A01, A02,三个GND(要与单片机共地!)
我只使用了一个电机,所以咱们的PWA口直接接到单片机的随便一个PWM口就行,我接的是PB0口,也就是TIM3,CH3 定时器3通道3。然后AIN1,AIN2,这两个口是控制正反转的,随便接单片机的I/O口,然后进行初始化就行了,STBY口直接接5V口(STBY是使能,高电平电机才能转,低电平电机是不会转的,所以直接接电压即可),最后A01和A02接电机的两根正负线即可,接电机的正负无所谓,别把单片机接错就行啦!(如果要使用第二个电机,PWMB接PWM口,其他的照抄,只是序号变了)

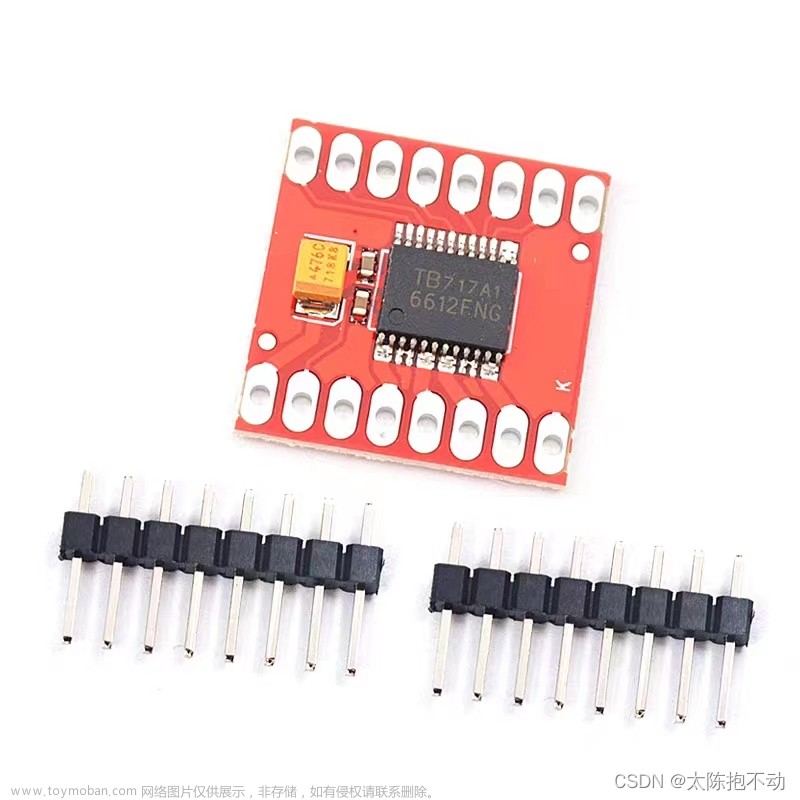
这是我使用的驱动
然后我们看一下真值表,方便大家控制正反转

二、STM32代码部分
MOTOR.C
#include "stm32f10x.h"
#include "MOTOR.h"
#include "sys.h"
#include "delay.h"
void Motor_AIN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_3|GPIO_Pin_7);
}
void Motor_ZHENG(void) //风扇正转
{
GPIO_SetBits(GPIOB,GPIO_Pin_7);
GPIO_ResetBits(GPIOB,GPIO_Pin_3);
}
void Motor_OFF(void) //风扇停止
{
GPIO_ResetBits(GPIOB,GPIO_Pin_3);
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
}
MOTOR.h
#ifndef __MOTOR_H
#define __MOTOR_H
#include "sys.h"
void Motor_AIN(void);
void Motor_ZHENG(void);
void Motor_OFF(void);
#endif
time.c
#include "stm32f10x.h"
#include "stdlib.h"
#include "stm32f10x_tim.h"
#include "led.h"
#include "myiic.h"
#include "key.h"
#include "delay.h"
#include "usart.h"
#include "time.h"
int pwm_L,pwm_R,change_pwm,eco_counter;
float get_ang,now_ang;
u8 place_flag,choose_num1=0,choose_num2=0,cargo_num,stop_flag,go_where,Return_stopflag;
u8 MOD1=0,MOD2=0,MOD3=0,MOD4=0;
void TIM3_PWM_Init(u16 arr,u16 psc)///pwm
{
GPIO_InitTypeDef GPIO_InitStrue;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_0;//PB0->CH3
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStrue);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low ;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3,ENABLE);
}
time.h
#ifndef __TIME_H
#define __TIME_H
#include "sys.h"
extern int pwm_L,pwm_R,change_pwm;
extern float get_ang,now_ang;
extern u8 place_flag,choose_num1,choose_num2,cargo_num,MOD1,MOD2,MOD3,MOD4,stop_flag,go_where,Return_stopflag,go_where;
void Encoder_Init_TIM3(void);
int ReadLeft_Encoder(void);
int ReadRight_Encoder(void);
void TIM1_PWM_Init(u16 arr,u16 psc);
void TIM4_PWM_Init(u16 arr,u16 psc);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
mian.c文章来源:https://www.toymoban.com/news/detail-791656.html
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "time.h"
#include "myiic.h"
#include "oled.h"
#include "beep.h"
#include "SR602.h"
#include "dht11.h"
#include "MOTOR.h"
int i=0;
u8 string[30] = {0},string1[30] = {0};
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先
delay_init();//延时函数初始化
TIM3_PWM_Init(999,71);//定时器3初始化
Motor_AIN();//风扇I/O初始化
while(1)
{
Motor_ZHENG();
TIM_SetCompare3(TIM3,1000);//设置占空比
}
}
把这些代码加到工程里面去,电机就能转动啦,有问题欢迎大家评论区提问,谢谢大家的阅读。文章来源地址https://www.toymoban.com/news/detail-791656.html
到了这里,关于STM32用TB6612驱动电机(智能家居系列二)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!