MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制
1.搭建了六自由度Stewart并联机器人simulink simscape仿真模型
2.建立了逆向运动学仿真 输入位置和姿态求解各个杆长
3.运用pid控制器进行动力学跟踪控制
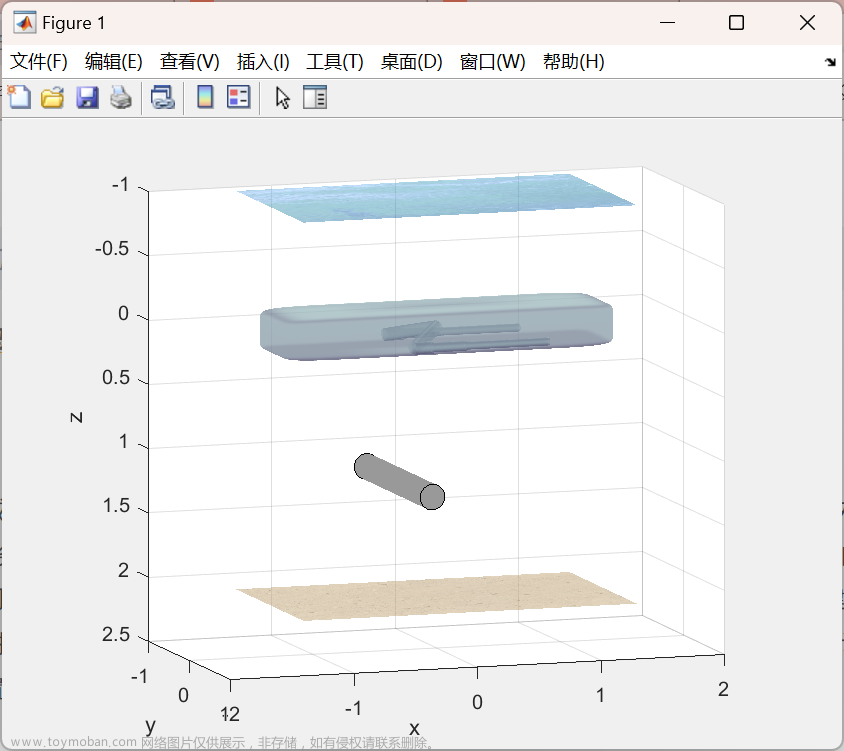
使用MATLAB进行了Gough-Stewart并联机器人的仿真。首先,我搭建了一个六自由度的Stewart并联机器人的Simulink Simscape仿真模型。然后,我建立了逆向运动学仿真,通过输入位置和姿态来求解各个杆长。最后,我使用PID控制器进行动力学跟踪控制。
YID:1324693562549681
这段话涉及到的知识点和领域范围包括:文章来源:https://www.toymoban.com/news/detail-792881.html
MATLAB仿真:MATLAB是一种高级技术计算软件,用于数值计算、数据可视化和编程。它在工程、科学和其他领域中广泛应用。
Gough-Stewart并联机器人:Gough-Stewart并联机器人是一种具有六个自由度的机器人系统,由固定底座和可移动平台以及连接它们的杆件组成。它具有高精度和高刚度,广泛应用于精密定位和运动控制领域。
逆向运动学:逆向运动学是指根据机器人的末端位置和姿态,求解机器人各个关节的位置和角度。它是机器人控制中的重要问题,用于实现期望的末端运动。
PID控制器:PID控制器是一种常用的反馈控制器,用于调节系统的输出以使其接近期望值。它通过比较实际输出和期望输出之间的差异,并根据比例、积分和微分三个控制参数来调整控制信号,实现系统的稳定和精确控制。
延申科普: Gough-Stew文章来源地址https://www.toymoban.com/news/detail-792881.html
到了这里,关于MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!