1 简介
Hi,大家好,学长今天向大家介绍一个 单片机项目
基于单片机的智能手环 -计步器
大家可用于 课程设计 或 毕业设计
1 项目背景意义
随着智能化时代的来临, 无线互联与智能化处理软件的大面积普及。 传统的就医形式已经通过网络互联科技而变得高效, 但是, 纵然在这种趋势下, 老年人就医依然面临很多困境, 种种的原因导致很多老年人突发疾病但是没能得多及时的救治。 老年智能手环主要致力于深入到整个救治老年人环节中, 促进几个关键人群的及时反应、 智能互联、 信息互通。 如何高效、 精准、 相对简洁的去实现种种义务之间的平衡, 包括子女对老人的赡养义务, 在大批量救治病患的过程中, 医生如何平衡好对每一个病人的义务。
随着科学技术的革新,智能化生活已经开始实现,更多的人们的目光聚焦在智能化产品上面,一方面是对自身健康的关注,另一方面是对便携轻松的生活的向往,智能手环就作为其中的一种代表性产物。其主要应用于运动显示比如显示行走及跑步的步数,距离,速度。同时可以实时健康监测比如心率,血氧,体温等。是一款突出个性与人性的智能化产物。
2 系统方案的设计
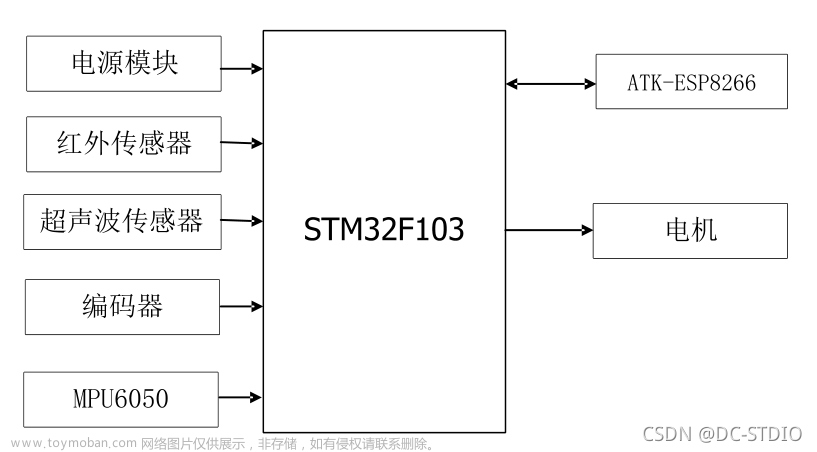
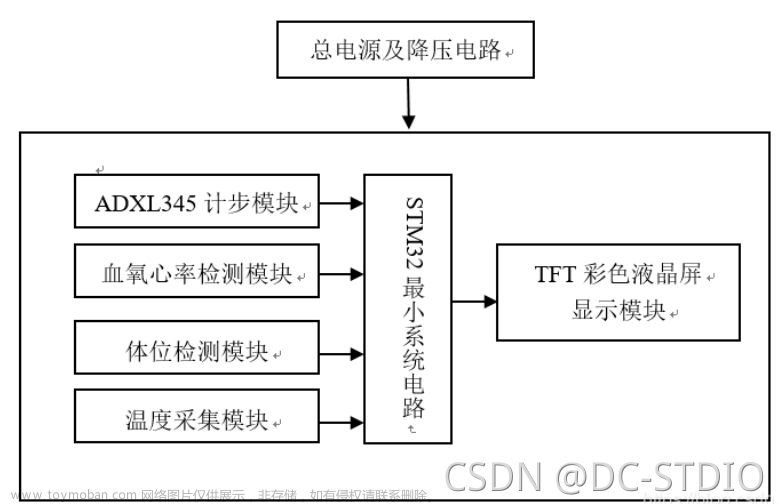
本设计是由STM32F103C8T6最小系统电路,DS3231时钟模块,ADXL345计步模块,MAX30100血氧心率模块,DS18B20温度模块,MPU6050体位检测模块,1.44寸TFT彩色液晶屏显示模块组成的嵌入式智能手环系统。
-
(1)通过DS3231时钟模块实现日期显示的功能
-
(2)使用传感器ADXL345检测人步数
-
(3)通过MAX30100传感器实时检测血氧心率;
-
(4)通过传感器DS18B20进行温度测量。
-
(5)通过MPU6050体位检测卧床病人是否跌倒或可以通过此功能蜂鸣器警报呼叫。
-
(6)通过1.44寸TFT彩色液晶屏实时显示日期,步数,距离,心率,血氧,跌倒状态以及温度值。
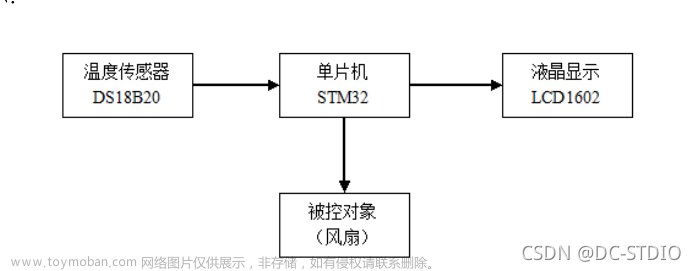
3 系统总体结构

4 系统硬件设计
4.1 主控模块
STM32C8T6(最小核心板),当然,用其他型号的32,如STM32ZET6也是可以的。

4.2 姿态解算模块:MPU6050

4.3 DS3231实物图

4.4 TFT显示模块

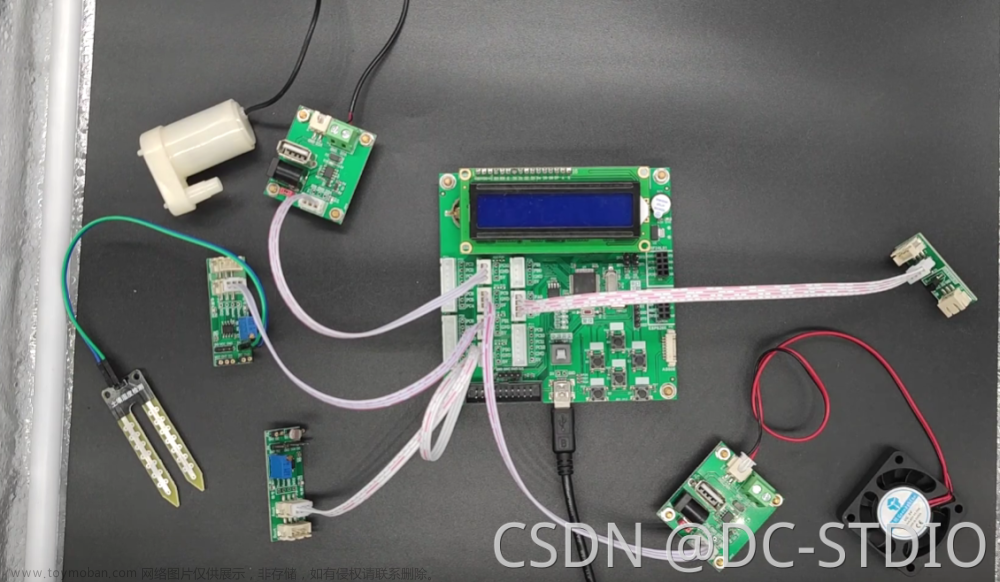
4.5 硬件连接效果

5 跌倒检测算法原理
当人体正常行走时, 合成加速度在 1g 至 2.5g 左右, 如下图所示。 当人体不论从何方向跌落时, 垂直方向的位置和速度都将会改变, 所以加速度和俯仰角也会随着而变化。 如图 4.7 中设置采样频率为 350Hz 并且可以看出图中跌倒过程中各个方向加速度变化情况。 当手环佩戴者跌落时, 整个过程持大约持续约 2 秒, 其加速度曲线变化是先减小然后增加, 最后稳定。 可以得出结论, 坠落是一个暂时的过程, 在这个过程中, 测试者经历失重、 撞击和静止三个状态。 在下降过程中, 合成加速度的最大值约为 2.6 g, 并且有 7 个连续采样点的合成加速度为 2.0 g 或更多。 当人摔倒时, 通过对人体姿态角的采样, 人体的俯仰角和侧翻角都会发生变化, 在跌倒后有一个或更多姿态角的绝对值大于 45°。
 文章来源:https://www.toymoban.com/news/detail-794106.html
文章来源:https://www.toymoban.com/news/detail-794106.html
5.1 跌倒检测的判定流程

跌倒最开始的加速度会是最大的, 当跌倒后人的自然反应会让加速度有所减小,所以跌倒有两个阈值, 第一个阈值较大为触发阈值, 第二个阀组为持续阈值, 然后在50 个周期内计时, 是否有 80%时间为大于第二个跌倒阈值的, 有这两个持续过程则判定为跌倒, 否则丢弃跌倒判定数据, 跌倒流程图如上图。文章来源地址https://www.toymoban.com/news/detail-794106.html
5.2 关键算法实现
if(adxl345_flag == 1)
{
adxl345_flag = 0;
Multiple_Byte_Read(0x32);//采样
sampling_cnt++;//采样次数
sampling_cnt0++;
/*-------------------平均滤波算法-----------------*/
for(i=0;i<3;i++)//0->x 1->y 2->z
{
reg_buf3[i] = reg_buf2[i];
reg_buf2[i] = reg_buf1[i];
reg_buf1[i] = reg_buf0[i];
reg_buf0[i] = (buf[2*i+1] << 8) + buf[2*i];//数据合成
filter_out[i] = (reg_buf0[i] + reg_buf1[i] + reg_buf2[i] +reg_buf3[i])/4;
if(filter_max[i] < filter_out[i]) filter_max[i] = filter_out[i];
if(filter_min[i] > filter_out[i]) filter_min[i] = filter_out[i];
}
/*-------------------动态阈值和动态精度算法------------------*/
if(sampling_cnt == 50)
{
sampling_cnt = 0;
/*printf("cnt:%ldms\r\n",cnt);//50次测量所用的时间
cnt=0;*/
//printf("interval:%ld\r\n",interval);
for(i=0;i<3;i++)
{
Vpp[i] = filter_max[i] - filter_min[i];//计算双峰值
Dynamic_threshold[i] = (filter_max[i] + filter_min[i])/2;//计算动态阈值
filter_max[i] = 0;//重新初始各轴的最大、最小值
filter_min[i] = 4095;
Error_flag[i] = 0;
//>100
if(Vpp[i] >= 250) Dynamic_precision[i] = Vpp[i]/50;//跑步
else if( (Vpp[i] >= 100) && (Vpp[i]<250) ) Dynamic_precision[i] = 3;//走路
else {Dynamic_precision[i] = 2;Error_flag[i] = 1;}
}
}
/*------------------线性移位 消除高频噪声--------------------*/
for(i=0;i<3;i++)
{
sample_old[i] = sample_new[i];
if(filter_out[i] >= sample_new[i])
{
if((filter_out[i] - sample_new[i]) > Dynamic_precision[i])
sample_new[i] = filter_out[i];
}
else if(filter_out[i] < sample_new[i])
{
if((sample_new[i] - filter_out[i]) > Dynamic_precision[i])
sample_new[i] = filter_out[i];
}
}
/*--------------------最大峰值检测,判断活跃轴,步伐判断----------------*/
//sample_new < Dynamic_threshold 表示已迈过动态阈值下方
//sample_new - sample_old < 0 表示加速度的变化小于0,斜率为负数
if( (Vpp[0] >= Vpp[1]) && (Vpp[0] >= Vpp[2]) ) //x轴活跃
{
if( (sample_old[0] > Dynamic_threshold[0]) && (sample_new[0] < Dynamic_threshold[0]) && (Error_flag[0] == 0) )
{
if( (interval > 10 ) && ( interval < 100 ) )
{
Step_Out+=1;
regulation3 = regulation2;
regulation2 = regulation1;
regulation1 = regulation0;
regulation0 = 1;
if( regulation3 && regulation2 && regulation1 && regulation0 )
printf("Step:%d\r\n",Step_Out);
}
else
{
regulation3 = 0;
regulation2 = 0;
regulation1 = 0;
regulation0 = 0;
}
interval = 0;
}
}
else if( (Vpp[1] >= Vpp[0]) && (Vpp[1] >= Vpp[2]) ) //y轴活跃
{
if( (sample_old[1] > Dynamic_threshold[1]) && (sample_new[1] < Dynamic_threshold[1]) && (Error_flag[1] == 0) )
{
/*----------时间窗口--------*/
if( (interval > 10 ) && ( interval < 100 ) )
{
Step_Out+=1;
/*-----------计数规则--------------*/
regulation3 = regulation2;
regulation2 = regulation1;
regulation1 = regulation0;
regulation0 = 1;
if( regulation3 && regulation2 && regulation1 && regulation0 )
printf("Step:%d\r\n",Step_Out);
}
else
{
regulation3 = 0;
regulation2 = 0;
regulation1 = 0;
regulation0 = 0;
}
interval = 0;
}
}
else if( (Vpp[2] >= Vpp[0]) && (Vpp[2] >= Vpp[1]) ) //z轴活跃
{
if( (sample_old[2] > Dynamic_threshold[2]) && (sample_new[2] < Dynamic_threshold[2]) && (Error_flag[2] == 0) )
{
if( (interval > 10 ) && ( interval < 100 ) )
{
Step_Out+=1;
regulation3 = regulation2;
regulation2 = regulation1;
regulation1 = regulation0;
regulation0 = 1;
if( regulation3 && regulation2 && regulation1 && regulation0 )
printf("Step:%d\r\n",Step_Out);
}
else
{
regulation3 = 0;
regulation2 = 0;
regulation1 = 0;
regulation0 = 0;
}
interval = 0;
}
}
//printf("Step:%d\r\n",Step_Out);
/*------速度 距离 卡路里-----*/
if(sampling_cnt0 == 100)
{
i_cnt++;
sampling_cnt0 = 0;
m_nPedometerValue = Step_Out;
Dynamic_step = m_nPedometerValue - m_nLastPedometer;//2s的步数变化
/*---每步距离----*/
if( Dynamic_step == 1 ) //身高取 170cm = 1.70m
StepLen = 1.70/5;
else if( Dynamic_step == 2 )
StepLen = 1.70/4;
else if( Dynamic_step == 3 )
StepLen = 1.70/3;
else if( Dynamic_step == 4 )
StepLen = 1.70/2;
else if( Dynamic_step == 5 )
StepLen = 1.70/1.2;
else if( ( Dynamic_step >= 6 ) && ( Dynamic_step < 8 ) )
StepLen = 1.70;
else if( Dynamic_step >= 8 ) StepLen = 1.70*1.2;
Speed = StepLen/2;
calories = Speed * weight/400;
printf("Dynamic_step:%d\t",Dynamic_step);
m_nLastPedometer = m_nPedometerValue;
printf("StepLen:%.3f\t",StepLen);
printf("Speed:%.3f\t",Speed);
printf("calories:%.3f\r\n",calories);
}
}
6 最后
到了这里,关于单片机毕业设计 STM32智能手环计步器 - 嵌入式 物联网的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!