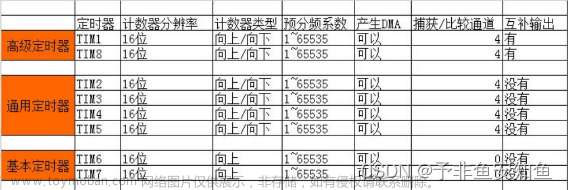
1.高级定时器简介(TIM8、TIM1)
相比于通用定时器特性:
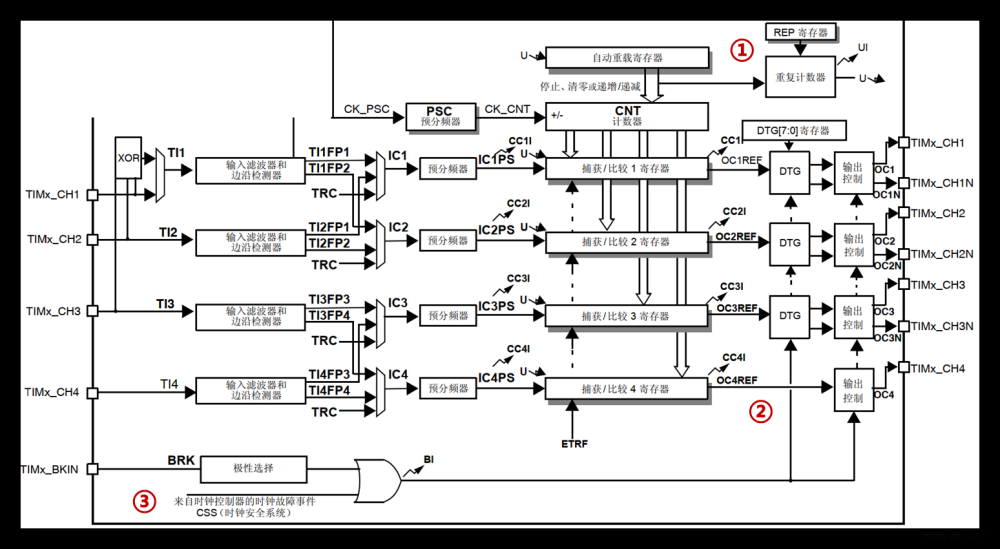
1)重复计数器
2)死区时间带可编程的互补输出
3)断路输入,用于将定时器的输出信号置于用户可选的安全配置中
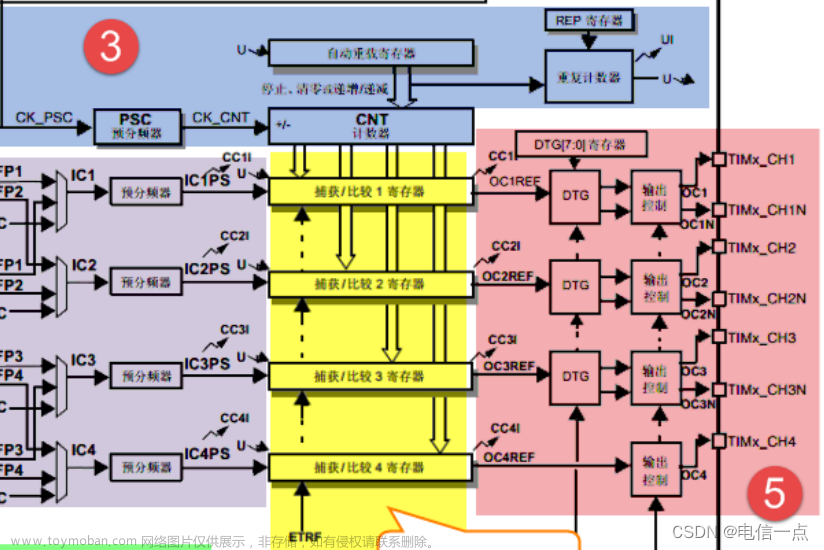
2.高级定时器框图

3.重复计数器特性及输出指定个数PWM波实战

4.高级定时器输出指定个数PWM波原理

5.高级定时器输出指定个数PWM实验配置步骤
1,配置定时器基础工作参数 HAL_TIM_PWM_Init()
2,定时器PWM输出MSP初始化 HAL_TIM_PWM_MspInit() 配置NVIC、CLOCK、GPIO等
3,配置PWM模式/比较值等 HAL_TIM_PWM_ConfigChannel()
4,设置优先级,使能中断 HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
5,使能定时器更新中断 __HAL_TIM_ENABLE_IT()
6,使能输出、主输出、计数器 HAL_TIM_PWM_Start()
7,编写中断服务函数 TIMx_IRQHandler()等 HAL_TIM_IRQHandler()
8,编写更新中断回调函数 HAL_TIM_PeriodElapsedCallback() 文章来源:https://www.toymoban.com/news/detail-794279.html
文章来源:https://www.toymoban.com/news/detail-794279.html
6.高级定时器输出指定个数PWM实战
1.通过定时器8通道1实现指定个数PWM输出,用于控制LED1的亮灭
2,配置输出比较模式为:PWM模式1
通道输出极性为:高电平有效
占空比:50%
代码:文章来源地址https://www.toymoban.com/news/detail-794279.html
6.1 atim.c
#include "./BSP/TIMER/atim.h"
#include "./BSP/LED/led.h"
//1.声明定时器句柄
TIM_HandleTypeDef g_timx_npwm_chy_handler;
static uint32_t g_npwm_remain = 0;
/**
* @brief 高级定时器TIMX 通道Y PWM输出指定个数PWM 初始化函数(使用PWM模式1)
* @note
* 高级定时器的时钟来自APB2,而PCLK =168Mhz,我们设置PPRE2不分频
* 高级定时器的时钟 = 168Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft = 定时器工作频率,单位:Mhz
*
* @param arr: 自动重装值
* @param psc: 预分频系数
* @retval 无
*/
//2.配置通用定时器基本工作参数,PWM输出初始化
void atim_timx_npwm_chy_init(uint16_t arr, uint16_t psc) /* 通用定时器 PWM初始化函数 */
{
//4.1定时器输出比较定时器结构体初始化
TIM_OC_InitTypeDef tim_oc_npwm_chy = {0};
//2.1通用定时器PWM输出初始化
g_timx_npwm_chy_handler.Instance = ATIM_TIMX_NPWM; //定时器x
g_timx_npwm_chy_handler.Init.Period = arr;
g_timx_npwm_chy_handler.Init.Prescaler = psc;
g_timx_npwm_chy_handler.Init.CounterMode = TIM_COUNTERMODE_UP;
g_timx_npwm_chy_handler.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; /* 使能TIMx_ARR进行缓冲 */
g_timx_npwm_chy_handler.Init.RepetitionCounter = 0; /* 重复计数器初始值 */
HAL_TIM_PWM_Init(&g_timx_npwm_chy_handler);
//5.输出比较配置包,括PWM模式和比较值
tim_oc_npwm_chy.OCMode = TIM_OCMODE_PWM1; //输出比较模式 PWM1
tim_oc_npwm_chy.Pulse = arr/2; //设置比较值为自动加载值的一般,则占空比为50%
tim_oc_npwm_chy.OCPolarity = TIM_OCPOLARITY_HIGH; //设置输出比较的极性为高
HAL_TIM_PWM_ConfigChannel(&g_timx_npwm_chy_handler,&tim_oc_npwm_chy,ATIM_TIMX_NPWM_CHY);
//6,使能定时器更新中断
__HAL_TIM_ENABLE_IT(&g_timx_npwm_chy_handler,TIM_IT_UPDATE);
//7,开启对应PWM通道使能输出并启动计时器
HAL_TIM_PWM_Start(&g_timx_npwm_chy_handler,ATIM_TIMX_NPWM_CHY);
}
//3.定时器PWM输出底层初始化,定时器时钟、引脚时钟使能,引脚复用配置
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef * htm)
{
//3.1判断是否是TIM14
if(htm->Instance == ATIM_TIMX_NPWM)
{
GPIO_InitTypeDef gpio_init_struct;
//3.3使能PF引脚口时钟
ATIM_TIMX_NPWM_CHY_GPIO_CLK_ENABLE();
//3.4使能定时器时钟
ATIM_TIMX_NPWM_CHY_CLK_ENABLE();
//3.2通道y的GPIO初始化
gpio_init_struct.Pin = ATIM_TIMX_NPWM_CHY_GPIO_PIN; /* 通道Y GPIO口 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
gpio_init_struct.Alternate =ATIM_TIMX_NPWM_CHY_GPIO_AF; /* 端口复用到TIM8 */
HAL_GPIO_Init(ATIM_TIMX_NPWM_CHY_GPIO_PORT, &gpio_init_struct);
//4 设置优先级、使能中断
HAL_NVIC_SetPriority(ATIM_TIMX_NPWM_IRQn,1,3);
HAL_NVIC_EnableIRQ(ATIM_TIMX_NPWM_IRQn);
}
}
/* 定时器8中断服务函数 */
void ATIM_TIMX_NPWM_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_npwm_chy_handler);
}
/* 定时器更新中断回调函数 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == ATIM_TIMX_NPWM) //如果是TIM8
{
if(g_npwm_remain)//如果重复计数值大于0,则需要发送PWM波
{
///* 设置重复计数寄存器值为npwm-1, 即npwm个脉冲 */
ATIM_TIMX_NPWM->RCR = g_npwm_remain - 1;
//通过软件更新事件,将RCR值缓冲到影子寄存器里面
HAL_TIM_GenerateEvent(&g_timx_npwm_chy_handler, TIM_EVENTSOURCE_UPDATE);
//使能计数器
__HAL_TIM_ENABLE(&g_timx_npwm_chy_handler);
//清零
g_npwm_remain = 0;
}
else
{
//关闭计数器
ATIM_TIMX_NPWM->CR1 &= ~(1 << 0); /* 关闭定时器TIMX,使用HAL Disable会清除PWM通道信息,此处不用 */
}
}
}
/**
* @brief 高级定时器TIMX NPWM设置PWM个数
* @param rcr: PWM的个数, 1~2^32次方个
* @retval 无
*/
void atim_timx_npwm_chy_set(uint32_t npwm)
{
if(npwm == 0) return ;
g_npwm_remain = npwm;
//通过软件更新事件,将RCR值缓冲到影子寄存器里面
HAL_TIM_GenerateEvent(&g_timx_npwm_chy_handler, TIM_EVENTSOURCE_UPDATE);
//使能计数器
__HAL_TIM_ENABLE(&g_timx_npwm_chy_handler);
}
6.2 atim.h
#ifndef __ATIM_H
#define __ATIM_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 高级定时器 定义 */
/* TIMX 输出指定个数PWM 定义
* 这里输出的PWM通过PC6(TIM8_CH1)输出, 我们用杜邦线连接PC6和PF10, 然后在程序里面将PF10设置成浮空输入
* 就可以 看到TIM8_CH1控制LED1(GREEN)的亮灭, 亮灭一次表示一个PWM波
* 默认使用的是TIM8_CH1.
* 注意: 通过修改这几个宏定义, 可以支持TIM1/TIM8定时器, 任意一个IO口输出指定个数的PWM
*/
#define ATIM_TIMX_NPWM_CHY_GPIO_PORT GPIOC
#define ATIM_TIMX_NPWM_CHY_GPIO_PIN GPIO_PIN_6
#define ATIM_TIMX_NPWM_CHY_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOC_CLK_ENABLE(); }while(0) /* PC口时钟使能 */
#define ATIM_TIMX_NPWM_CHY_GPIO_AF GPIO_AF3_TIM8
#define ATIM_TIMX_NPWM TIM8
#define ATIM_TIMX_NPWM_IRQn TIM8_UP_TIM13_IRQn
#define ATIM_TIMX_NPWM_IRQHandler TIM8_UP_TIM13_IRQHandler
#define ATIM_TIMX_NPWM_CHY TIM_CHANNEL_1 /* 通道Y, 1<= Y <=4 */
#define ATIM_TIMX_NPWM_CHY_CCRX TIM8->CCR1 /* 通道Y的输出比较寄存器 */
#define ATIM_TIMX_NPWM_CHY_CLK_ENABLE() do{ __HAL_RCC_TIM8_CLK_ENABLE(); }while(0) /* TIM8 时钟使能 */
void atim_timx_npwm_chy_init(uint16_t arr, uint16_t psc); /* 高级定时器 输出指定个数PWM初始化函数 */
void atim_timx_npwm_chy_set(uint32_t npwm); /* 高级定时器 设置输出PWM的个数 */
#endif
6.3 main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/TIMER/atim.h"
int main(void)
{
uint8_t key = 0;
uint8_t t = 0;
GPIO_InitTypeDef gpio_init_struct;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
key_init(); /* 初始化按键 */
/* 将 LED1 引脚设置为输入模式, 避免和PC6冲突 */
gpio_init_struct.Pin = LED1_GPIO_PIN; /* LED1引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 设置为输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 高速模式 */
HAL_GPIO_Init(LED1_GPIO_PORT, &gpio_init_struct); /* 初始化LED1引脚 */
atim_timx_npwm_chy_init(10000 - 1, 8400 - 1); /* 20Khz的计数频率,2Hz的PWM频率. */
ATIM_TIMX_NPWM_CHY_CCRX = 5000; /* 设置PWM占空比,50%,这样可以控制每一个PWM周期,LED1(GREEN)
* 有一半时间是亮的,一半时间是灭的,LED1亮灭一次,表示一个PWM波
*/
atim_timx_npwm_chy_set(5); /* 输出5个PWM波(控制LED1(GREEN)闪烁5次) */
while (1)
{
key = key_scan(0);
if (key == KEY0_PRES) /* KEY0按下 */
{
atim_timx_npwm_chy_set(5); /* 输出5个PWM波(控制TIM8_CH1, 即PC6输出5个脉冲) */
}
t++;
delay_ms(10);
if (t > 50) /* 控制LED0闪烁, 提示程序运行状态 */
{
t = 0;
LED0_TOGGLE();
}
}
}
到了这里,关于STM32——高级定时器输出指定个数PWM波原理及实战的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!