一、简介
主要实现实时检测视频或者摄像头中出现的固定颜色(本例中使用绿色)是否在规定的区域范围内,并将结果反馈到原视频上。
二、效果
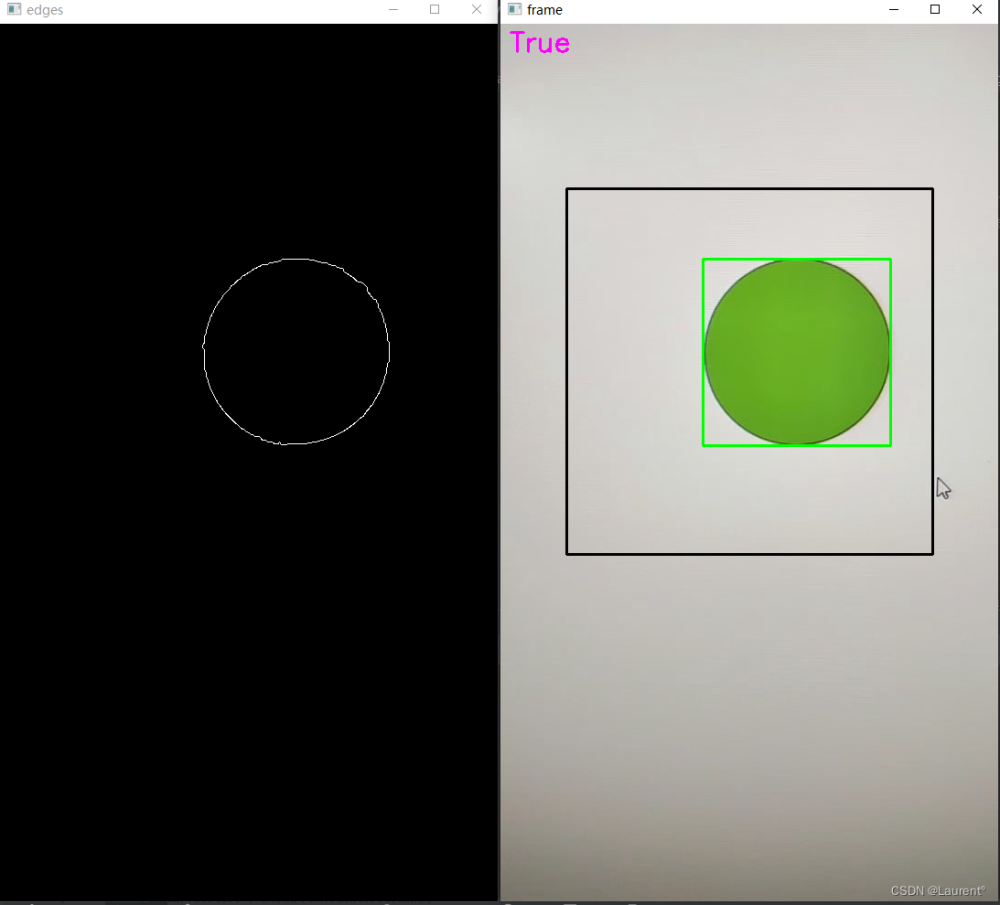
实现的效果如下图所示:
1、当绿色物体出现在屏幕中的黑框中时,在视频左上角反馈一个“True”的信息。
2、当绿色物体出现在屏幕中但没有完全出现在黑框中时,在视频左上角反馈一个“Flase”的信息。

3、当绿色物体没有出现在屏幕中时,不显示任何信息。
三、代码
运行环境:python 3.8.17 opencv 4.8.0
下面是完整代码:
import numpy as np
import cv2
cap = cv2.VideoCapture("video.mp4") # 将"video.mp4"换为0,即可调用摄像头
width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH)) # 获取视频的宽度
height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT)) # 获取视频的高度
print(width, height)
# 下面是规定区域的位置设置
w1 = 400
h1 = 400
x1 = int(width / 2 - w1 / 2)
y1 = int(height / 2 - h1 / 2 - 100)
# print(x1, y1, x1 + w1, y1 + h1)
font = cv2.FONT_HERSHEY_SIMPLEX # 设置字体样式
kernel = np.ones((5, 5), np.uint8) # 卷积核
if cap.isOpened() is True: # 检查摄像头是否正常启动
while True:
ret, frame = cap.read()
if not ret:
break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转换为灰色通道
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) # 转换为HSV空间
lower_green = np.array([35, 50, 100]) # 设定绿色的阈值下限
upper_green = np.array([77, 255, 255]) # 设定绿色的阈值上限
# 消除噪声
mask = cv2.inRange(hsv, lower_green, upper_green) # 设定掩膜取值范围
opening = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel) # 形态学开运算
bilateral = cv2.bilateralFilter(mask, 10, 200, 200) # 双边滤波消除噪声
edges = cv2.Canny(opening, 50, 100) # 边缘识别
# 在原视频上跟踪目标绘制绿色矩形框
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
x, y, w, h = cv2.boundingRect(contour) # 获取轮廓的边界框
# print(x, y, w, h)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # 在原视频上绘制矩形框
# 判断位置关系
if x >= x1 and y >= y1 and x + w <= x1 + w1 and y + h <= y1 + h1:
result = "True"
else:
result = "Flase"
cv2.putText(frame, result, (10, 30), font, 1.0, (255, 0, 255), 2)
# 在原视频上绘制限定区域框
cv2.rectangle(frame, (x1, y1), (x1 + w1, y1 + h1), (0, 0, 0), 2) # frame要绘制的帧,四个坐标点,颜色,线宽
cv2.imshow('edges', edges)
cv2.imshow('frame', frame)
k = cv2.waitKey(5) & 0xFF
# 按Esc键退出
if k == 27:
break
cap.release()
cv2.destroyAllWindows()
else:
print('cap is not opened!')可以将cv2.rectangle(frame, (x1, y1), (x1 + w1, y1 + h1), (0, 0, 0), 2)缩进,把固定区域框的颜色从黑色(0,0,0)换为变量color,与判定结果"True""Flase"关联,设为两种不同的颜色,即可只管看到区域之间的位置关系。
缺点:对噪声处理不完全,在分割边缘的时候会产生噪点。文章来源:https://www.toymoban.com/news/detail-797611.html
参考自,侵删:OpenCV-Python——实现圆形检测与追踪_opencv打开摄像头检测圆的中心位置python_YukinoSiro的博客-CSDN博客文章来源地址https://www.toymoban.com/news/detail-797611.html
到了这里,关于Python-opencv实现目标检测定位:判断固定颜色物体是否在规定区域内的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!