#include "Driver_IIC.h"
#include "Delay.h"
/**
* IIC默认地工作于从模式。
* 生成起始条件后自动地从从模式切换到主模式,
* 当仲裁丢失或产生停止信号时,从主模式切换到从模式。
*
*
* 从模式用于接收数据;主模式用于发送数据。
*/
/**
* 初始化
*/
void Driver_IIC_Init(void)
{
/* 1.时钟控制使能IIC 和 GPIOB */
RCC->APB1ENR |= RCC_APB1ENR_I2C2EN;
RCC->APB2ENR |= RCC_APB2ENR_IOPBEN;
/* 2.配置PB10、PB11为复用开漏 */
// PB10 和 PB11 引脚为 I2C2
GPIOB->CRH |= ( GPIO_CRH_MODE10 | GPIO_CRH_CNF10 | GPIO_CRH_MODE11 | GPIO_CRH_CNF11 );
/* 3.配置IIC, */
// 3.0 配置SMBUS模式,0为IIC模式;1为SMBUS模式。
I2C2->CR1 &= ~I2C_CR1_SMBUS;
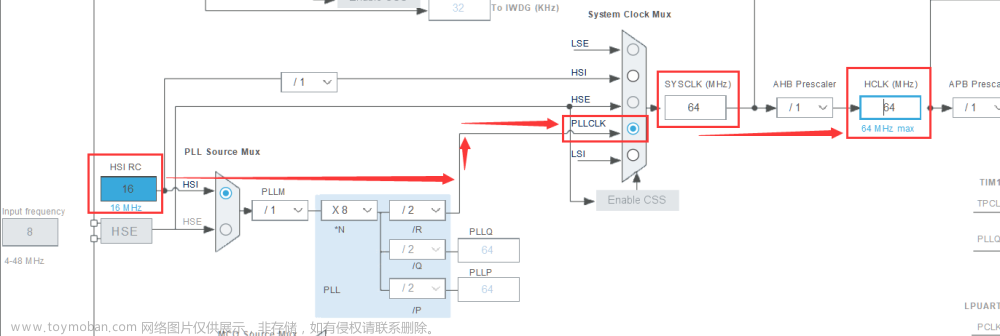
// 3.1 配置IIC时钟频率 FREQ
// 这里就不先将0-5位清零了,直接 或 操作了。
I2C2->CR2 |= 0x24;
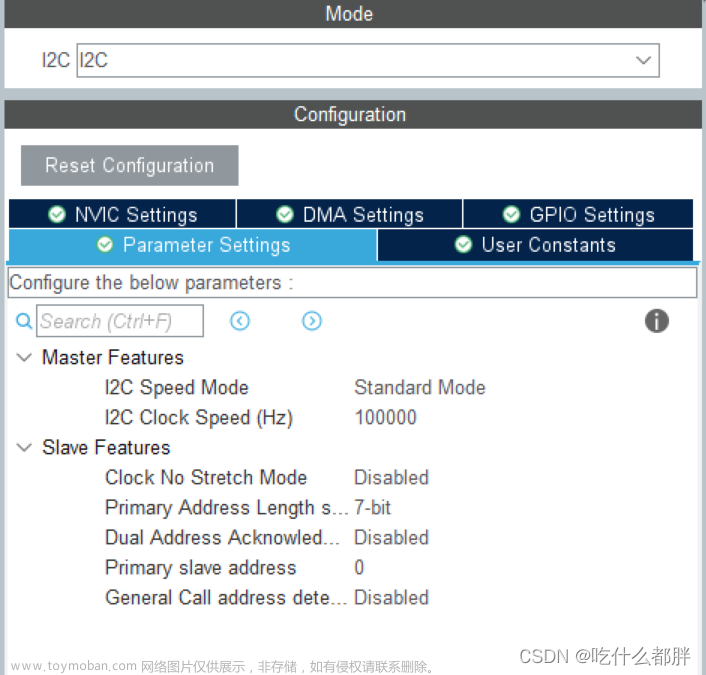
// 3.2 配置模式(标准模式/快速模式)
I2C2->CCR &= ~I2C_CCR_FS;
// 3.3 配置通讯速率(标准模式100KHz,快速模式400KHz),
// 计算为: CCR = Thigh / T
// ---> 100KHz/s 即 10us/1Hz, Thigh+Tlow=10us,Thigh=5us (即5us产生一个高电平)
// ---> T为周期(产生一个方波需要的时间) = 1s/f f为频率, 即 1s/36MHz,即 1us/36Hz, 即 1/36us产生一个方波
// ---> CRR = 5 / (1/36) = 180
I2C2->CCR |= 180;
// 3.4 允许的SCL最大上升时间 TRISE = (最大上升沿时间/时钟周期)+1 (100KHz要求最大上升沿时间不超过1us)
I2C2->TRISE |= 37;
// 3.5 IIC使能PE
I2C2->CR1 |= I2C_CR1_PE;
}
/**
* 产生开始条件
* 1成功;0失败
*/
uint8_t Driver_IIC_Start(void)
{
/* 1.起始条件产生,无所谓主从,1就行 */
// 起始条件产生后,就从从模式变成主模式了
I2C2->CR1 |= I2C_CR1_START;
/* 2.用SR1的SB位判断主模式起始条件,加个检测超时的变量判断*/
uint16_t timeout = 0xffff;
while(!(I2C2->SR1&I2C_SR1_SB) && timeout) {
timeout--;
}
/* 3.返回开始条件是否返回成功 */
return timeout ? 1: 0;
}
/**
* 产生终止条件
*/
void Driver_IIC_Stop(void)
{
/* 产生终止条件 */
// 终止产生后,自动变为从模式
I2C2->CR1 |= I2C_CR1_STOP;
}
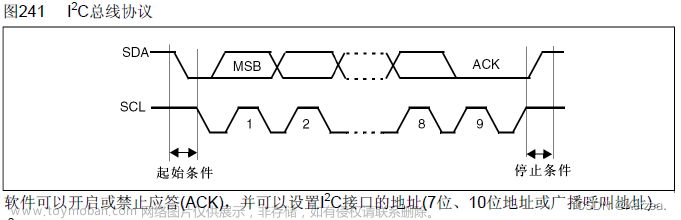
/**
* 产生应答
*/
void Driver_IIC_ACK(void)
{
/* 产生应答信号 */
I2C2->CR1 |= I2C_CR1_ACK;
}
/**
* 产生无应答
*/
void Driver_IIC_NACK(void)
{
/* 产生无应答信号 */
I2C2->CR1 &= ~I2C_CR1_ACK;
}
/**
* 发送地址
* 发送成功返回1;失败返回0
*/
uint8_t Driver_IIC_SendAddr(uint8_t addr) {
uint16_t timeout = 0xffff;
while (((I2C2->SR1 & I2C_SR1_TXE) == 0) && timeout)
{
timeout--;
}
/* 把数据写入到数据寄存器中 */
I2C2->DR = addr;
/* 等待地址发送完成。*/
timeout = 0xffff;
while(!(I2C2->SR1 & I2C_SR1_ADDR) /* 地址还没有发送结束 */ && timeout) {
timeout--;
}
// 走出循环后,如果timeout为0,则是超时了;如果timeout非0,则是发送结束了。
if(timeout) {
// 通过 读取SR1寄存器 再 读取SR2寄存器 对 ADDR寄存器进行清零
// I2C2->SR1;
I2C2->SR2;
return 1;
}
return 0;
}
/**
* 发送一个字节
* 1成功;0失败
*/
uint8_t Driver_IIC_Transmit(uint8_t byte)
{
/* 1.等待数据寄存器空 */
uint16_t timeout = 0xffff;
while(!(I2C2->SR1&I2C_SR1_TXE) && timeout) {
timeout--;
}
if(!timeout) return 0;
/* 2.往数据寄存器中写数据 */
I2C2->DR = byte;
/* 3. 通过SR1_BTF位判断数据是否发送结束,并返回 */
timeout = 0xffff;
while(!(I2C2->SR1&I2C_SR1_BTF) && timeout) {
timeout--;
}
return timeout ? 1:0;
}
/**
* 读取一个字节
*/
uint8_t Driver_IIC_ReadByte(void)
{
/* 1.通过SR1_RxNE位判断数据寄存器是否非空 */
uint16_t timeout = 0xffff;
while(!(I2C2->SR1&I2C_SR1_RXNE) && timeout) {
timeout--;
}
/* 2.根据判断结果返回数据寄存器中的值 */
return timeout ? I2C2->DR : 0;
}
文章来源地址https://www.toymoban.com/news/detail-798568.html
文章来源:https://www.toymoban.com/news/detail-798568.html
到了这里,关于stm32硬件实现IIC的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!