经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
3.4 自动驾驶使用的高分辨成像雷达
如今,许多专为ADAS功能设计的汽车雷达收发器,如NXP半导体的MR3003和德州仪器的AWR2243,可以支持多达三个发射天线和四个接收天线。因此,使用具有MIMO雷达技术的单个汽车雷达收发器,只能合成12个虚拟阵列阵元。在本节中,我们介绍了利用MIMO雷达技术合成的具有数百个虚拟天线阵元的高分辨率成像雷达。
3.4.1 多雷达收发器级联
为了满足4级和5级自动驾驶的要求,需要将多个汽车雷达收发器级联在一起,并将所有收发器同步为一个单元。来自所有接收天线的接收数据将被相干处理。级联提供了一种经济有效且可扩展的解决方案,以实现高角度分辨率。在参考文献73中,通用汽车公司和德州仪器公司成功地演示了多达4个德州仪器公司的AWR1243雷达芯片可以级联在一起,提供12个发射天线和16个接收天线,从而实现192个虚拟阵列元素的合成。在[74]中,已经构建了级联5个Infineon雷达芯片的原型,用于合成128*4个阵元的虚拟阵列。如此多的虚拟阵列阵元为阵列设计提供了大量的机会。在[60]中可以找到几种方位角和俯仰角阵列配置。几种商用成像雷达产品具有不同的阵列配置,如采埃孚的前视全距雷达和大陆公司的ARS540[75,76]。通常,需要考虑平衡方位角分辨率和俯仰角分辨率的问题。
3.4.2 级联成像雷达示例
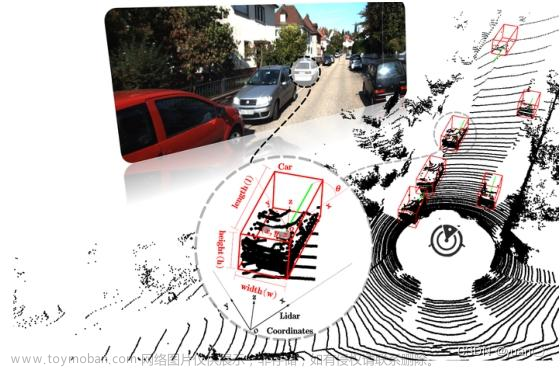
图3.15所示为成像雷达设计参考板,其中有12根发射天线和16根接收天线,由4个德州仪器AWR2243雷达收发器级联而成[77]。方位视场为[-70°,70°]。选择一个收发器作为主收发器,其他收发器作为从收发器进行时钟分配。这样可以实现4个收发器之间的同步,实现12个发射天线的相干FMCW发射和16个接收天线的联合数据处理。级联成像雷达的阵列配置如图3.15所示。有沿垂直方向放置的三个发射天线用于俯仰角查找,有沿水平方向放置的九个发射天线用于方位角查找。水平方向的虚拟阵列是一个半波长间隔的密集ULA,由86个虚拟阵列阵元组成(重叠虚拟阵列阵元未显示)。方位角方向阵列孔径为Dx = 42.5λ。在天线理论中,3dB波束宽度定义了角分辨率。根据文献[43],方位角的3dB波束宽度为
 (3.31)
(3.31)
在垂直方向上,三个俯仰角位置的天线沿水平方向形成多个最小冗余阵列(MRA)[78]。MRA的角度查找需要多个快照。这些沿水平方向的MRA可以用作俯仰角查找的快照。俯仰角阵列孔径为Dy = 3λ,俯仰角3dB波束宽度为
 (3.32)
(3.32)

图3.15 德州仪器AWR2243成像雷达板(上图)[77]。4个TI AWR2243雷达收发器级联在一起,提供12个发射天线和16个接收天线(中图),可以合成192个虚拟阵列元素(下图)。[6]
3.4.3 成像雷达设计挑战
在具有大量发射天线的FMCW成像雷达中实现波形正交性是一项具有挑战性的工作。一种策略可能是将发射天线分成几个子组。在每个子组中,发射天线采用慢时间相位编码(DDM)同时发射,而不同子组的天线则被安排在不同的时隙(TDM)发射。文章来源:https://www.toymoban.com/news/detail-798641.html
多个级联收发器之间的时钟分配也具有挑战性。对于FMCW混频器工作,一个本振在主从端共享,并且从主从端到所有从端的本振路由必须匹配。此外,额外的ADC采样和不同收发器之间的数据传输需要同步。开发一种可以包含大量发射和接收天线的汽车雷达收发器是可取的。例如,Uhnder开发了一种雷达片上系统(SoC),它有12个发射天线和16个接收天线,可以合成192个虚拟阵列元素[79](在后面的章节中更详细地讨论)。因此,如图3.15所示,级联成像雷达中现有的四个汽车雷达收发器可以用单个SoC雷达芯片代替。Vayyar开发的片上雷达(RoC)有48个76 - 81 GHz的收发器,可提供2000多个虚拟阵列阵元的合成[80]。文章来源地址https://www.toymoban.com/news/detail-798641.html
到了这里,关于现代雷达车载应用——第3章 MIMO雷达技术 3.4节 自动驾驶使用的高分辨成像雷达的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!