⛄一、粒子群算法简介
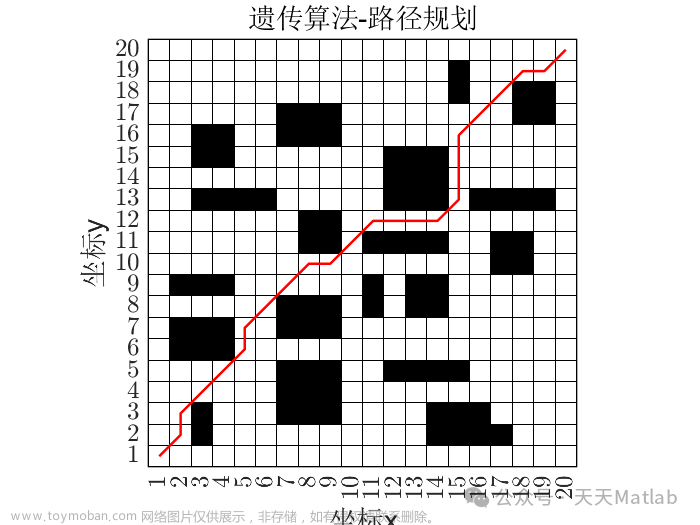
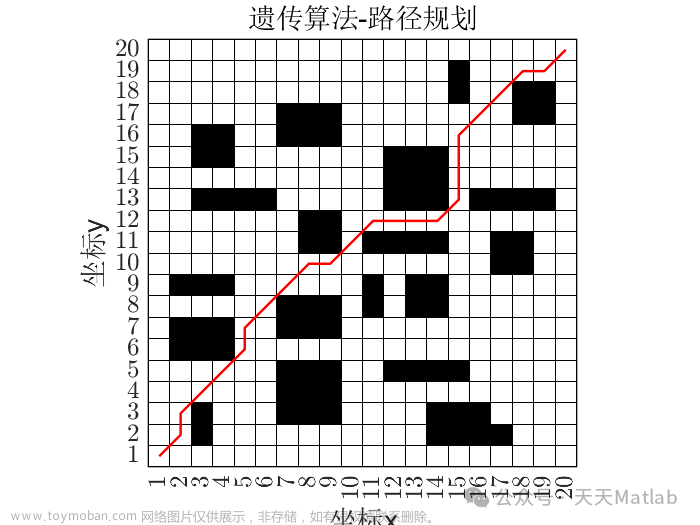
粒子群算法(Particle Swarm Optimization, PSO)可以用于栅格地图上机器人的最短路径规划。在这种问题中,栅格地图被划分为离散的单元格,每个单元格可以是阻挡或可通过的区域。机器人需要从起始位置移动到目标位置,避免碰到阻挡。
PSO算法中,通过使用一群粒子来搜索最优解。每个粒子代表一个候选解决方案,即机器人的路径。每个粒子根据自身的历史最优解和群体最优解进行更新,并根据一定的策略进行移动。
在栅格地图上,可以将每个单元格看作空间中的一个位置。每个粒子在空间中的位置代表机器人的当前位置,而粒子的速度代表机器人的移动方向和速度。每个粒子根据自身位置和速度进行移动,并计算移动后的路径长度。
PSO算法中的目标函数可以定义为机器人从起始位置到目标位置的路径长度。通过迭代更新粒子的位置和速度,直到达到预定的停止条件(例如达到最大迭代次数或找到满意的最短路径),从而找到最优的路径规划。
⛄二、部分源代码
function varargout = GUIbiyeshiji(varargin)
% GUIBIYESHIJI M-file for GUIbiyeshiji.fig
% GUIBIYESHIJI, by itself, creates a new GUIBIYESHIJI or raises the existing
% singleton*.
%
% H = GUIBIYESHIJI returns the handle to a new GUIBIYESHIJI or the handle to
% the existing singleton*.
%
% GUIBIYESHIJI(‘CALLBACK’,hObject,eventData,handles,…) calls the local
% function named CALLBACK in GUIBIYESHIJI.M with the given input arguments.
%
% GUIBIYESHIJI(‘Property’,‘Value’,…) creates a new GUIBIYESHIJI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before GUIbiyeshiji_OpeningFunction gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to GUIbiyeshiji_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE’s Tools menu. Choose “GUI allows only one
% instance to run (singleton)”.
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help GUIbiyeshiji
% Last Modified by GUIDE v2.5 22-Jun-2009 03:05:52
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct(‘gui_Name’, mfilename, …
‘gui_Singleton’, gui_Singleton, …
‘gui_OpeningFcn’, @GUIbiyeshiji_OpeningFcn, …
‘gui_OutputFcn’, @GUIbiyeshiji_OutputFcn, …
‘gui_LayoutFcn’, [] , …
‘gui_Callback’, []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% — Executes just before GUIbiyeshiji is made visible.
function GUIbiyeshiji_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to GUIbiyeshiji (see VARARGIN)
% Choose default command line output for GUIbiyeshiji
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes GUIbiyeshiji wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% — Outputs from this function are returned to the command line.
function varargout = GUIbiyeshiji_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% — Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
clc;clear;
%close(1);close(2);close(3);close(4);
handles=guihandles;
p1=get(handles.edit1,‘String’);
p=eval(p1);
Object_num=p;%%% ϰ Ŀ
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%% ϰ %%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
num=Object_num;
x=rand(num,1);
y=rand(num,1);
point=[x,y];
% % load(‘D:\MATLAB71\work\ ҵ \goodpoint.mat’)
% % x=point(:,1);y=point(:,2);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%% ڵ ״ͼ ϻ ϰ ﻷ %%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
global photo_ll photo_cc photo;
photo_ll=300;photo_cc=300;
photo=ones(photo_ll,photo_cc);
[photo_point,aaa]=plot2photo(point);
[photo_point_amount,aaa]=size(photo_point);
for i=1:photo_point_amount
photo_point_around=square(photo_point(i,:),15);%%%%%%%%%%%%%%%%%%%% ͼ εĴ С
aaa=blacken_photo(photo_point_around);
end
global photo_connect_points;
photo_connect_points=photo;
figure
imshow(photo)
title(’ ϰ ﻷ ')
% — Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
clc;clear;
%close(1);close(2);close(3);close(4);
handles=guihandles;
p1=get(handles.edit1,‘String’);
p=eval(p1);
Object_num=p;%%% ϰ Ŀ
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%% ϰ %%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
num=Object_num;
x=rand(num,1);
y=rand(num,1);
point=[x,y];
% % load(‘D:\MATLAB71\work\ ҵ \goodpoint.mat’)
% % x=point(:,1);y=point(:,2);
⛄三、运行结果







⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]陈新,朱自强,张春雷. 基于粒子群优化算法的移动机器人路径规划[J]. 控制与决策,2009,24(3):0395-0400.
[2]张宁,鲍孟阳,孙晓林. 基于粒子群算法的机器人路径规划及其仿真实现[J]. 控制工程,2011,18(3):452- 456.
[3]王宏明,徐志刚,郭庆剑. 粒子群优化算法在移动机器人路径规划中的应用[J]. 计算机应用与软件,2013,30(3):56-59.
[4]蔡志峰,黄树新,徐伟. 基于改进粒子群优化算法的机器人路径规划[J]. 计算机应用研究,2014,31(12):3607-3610.
[5]赵辉,陈留涛. 基于改进粒子群算法的移动机器人路径规划研究[J]. 中国科技信息,2016,31(13):296-297.文章来源:https://www.toymoban.com/news/detail-798792.html
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除文章来源地址https://www.toymoban.com/news/detail-798792.html
到了这里,关于【路径规划】粒子群算法求解机器人障碍物环境的Voronoi图路径规划【含GUI Matlab源码 3748期】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!