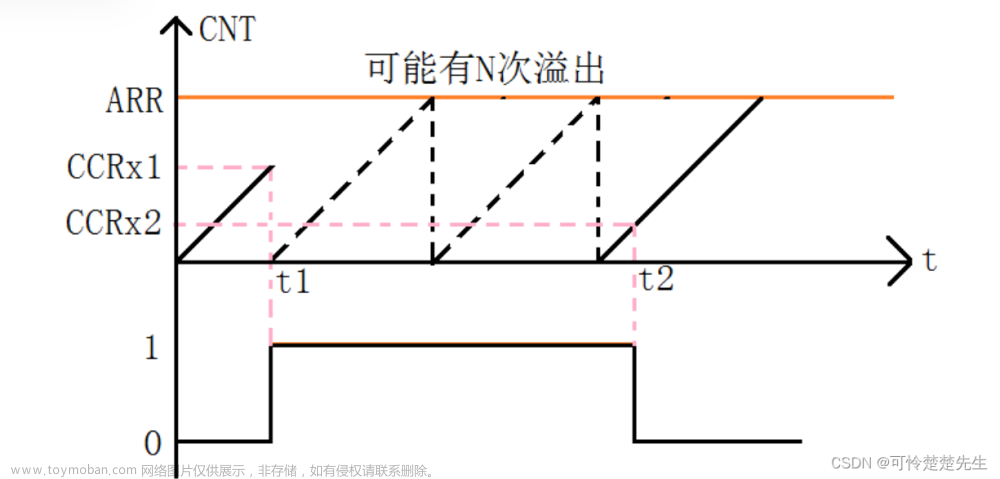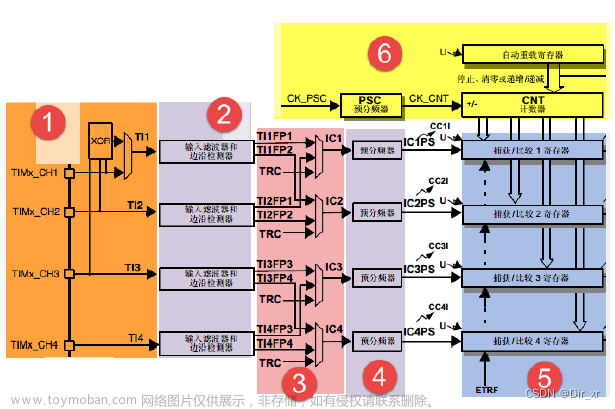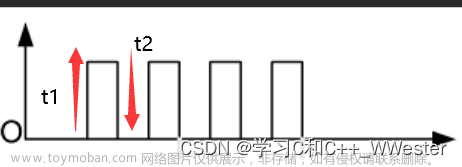
由上图我们可以知道,高电平时间=t2-t1。在代码中,可以记录此时t1的时间然后再记录t2的时间,t2-t1,就是我们所想要的答案。
但是,还有更简单一点点的,当到达t1的时候,我们把定时器清零,然后直接读出t2,就是这个高电平的时间。
- 1.当TIM3的TIM_FLAG_CC1==1时,清除TIM3
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_FLAG_CC1)==SET)
{
TIM_SetCounter(TIM3,0);
}
TIM_ClearITPendingBit(TIM3,TIM_FLAG_CC1);
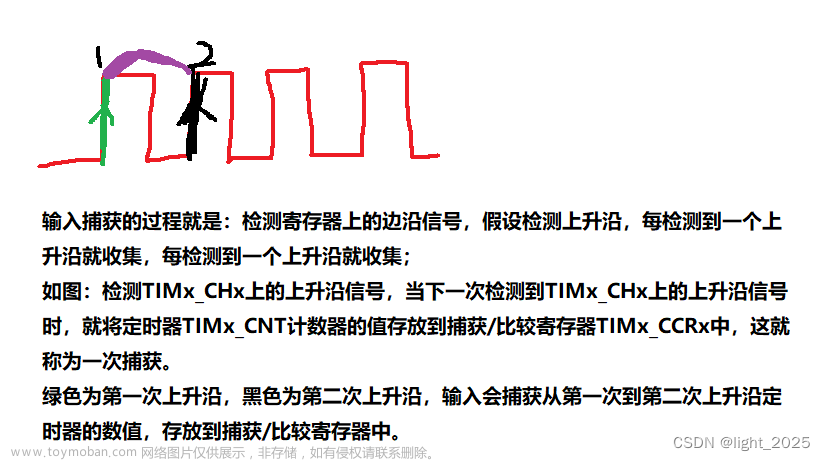
}- 2.从波形图可以看出,刚开始检测的是上升沿,所以检测TIM_FLAG_CC1的时候是SET,到了第二步,波形开始下降,变为下降沿,此时我们就要更改一下检测的方式了,我们可以用到下面这个函数。


TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_Low);
//更改下次检测的极性为low(低电平)void TIM3_IRQHandler(void)
{
static unsigned char high_flag = 0;
if(TIM_GetITStatus(TIM3,TIM_FLAG_CC1)==SET)
{
if(high_flag == 0)//上升沿
{
high_flag = 1;
TIM_SetCounter(TIM3,0);
TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_Low);
}
else//下降沿
{
high_value = TIM_GetCounter(TIM3);
TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_High);
high_flag = 0;
}
}
TIM_ClearITPendingBit(TIM3,TIM_FLAG_CC1);
}- 3.每次到下一个波形的时候,都重新初始化一下high_value.
if(high_flag == 0)//上升沿
{
high_flag = 1;
high_value = 0;
TIM_SetCounter(TIM3,0);
TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_Low);
}- 4.如果在main中,去使用了high_value,此时高电平还在不断输出,定时器也在运行,high_value仍会该改变,对于high_value的使用就不方便。所以我们需要限制一个条件,当我们使用high_value的时候,不要去重新写high_value了。
void TIM3_IRQHandler(void)
{
static unsigned char high_flag = 0;
if(high_complete_flag == 0)
{
if(TIM_GetITStatus(TIM3,TIM_FLAG_CC1)==SET)
{
if(high_flag == 0)//上升沿
{
high_flag = 1;
high_value = 0;
TIM_SetCounter(TIM3,0);
TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_Low);
}
else//下降沿
{
high_value = TIM_GetCounter(TIM3);
TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_High);
high_flag = 0;
high_complete_flag = 1;
}
}
}
TIM_ClearITPendingBit(TIM3,TIM_FLAG_CC1);
}在使用high_value之前,让high_complete_flag = 0;这样之后时,high_value就不会变了。文章来源:https://www.toymoban.com/news/detail-799521.html
main文章来源地址https://www.toymoban.com/news/detail-799521.html
int main(void)
{
TIM2_PWM_Configuration();//PWM周期为20ms
TIM3_InputCaputure_Configuration();//PA1:发出《————》PA6:接收
Uart1_Configuration();
TIM_SetCompare2(TIM2,10000);//占空比为50%,即10ms高电平
while(1)
{
if(high_complete_flag == 1)
{
printf("%d us",high_value);
high_complete_flag = 0;
}
Delay_s(10);
}
}
到了这里,关于STM32 定时器输入捕获2——捕获高电平时长的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!